

4.4. Системы регистрации параметров технологических процессов
Современные системы управления качеством продукции требуют регистрации фактических параметров технологических процессов, подтверждающих безопасность производимой пищевой продукции. Регистрограммы параметров обеспечивают стандартные самописцы, комбинированные самописцы или регистрирующие системы, обеспечивающие регистрацию пиковых значений параметров и обработку сигнала. Устройства регистрации непрерывного действия могут регистрировать мгновенные изменения параметра (пиковые значения) в реальном масштабе времени. Печатная копия представляет собой регистрограмму в виде временной характеристики параметра, координатной сетки и соответствующего текста, выполненных черным цветом на белом фоне (измеренные значения маркируются цветными метками). Пример регистрограммы приведен на рис.8. Одновременно отображение параметров обеспечивается на экране дисплея. В соответствии с требованиями международных стандартов управления качеством продукции необходимо обеспечить не только распечатку основных параметров технологических процессов, но и предусмотреть возможность их обработки. С этой целью данные должны быть уплотнены (архивированы) и храниться в системе. На вход системы поступают сигналы, подтверждающие начало и окончание процесса. Система «изучает» эталонный процесс в автоматическом режиме и запоминает значения основных параметров. С этими значениями сравниваются параметры реальных технологических процессов. После завершения процесса пользователь может получить полный1 и точный отчет, в котором отмечены пиковые и средние значения параметров и проведена верификация. Таким образом, достигается гарантированное соответствие продукции установленным стандартам. На рис. 9 приведена принципиальная схема измерительной системы Mega-Log фирмы Endress + Hauser.
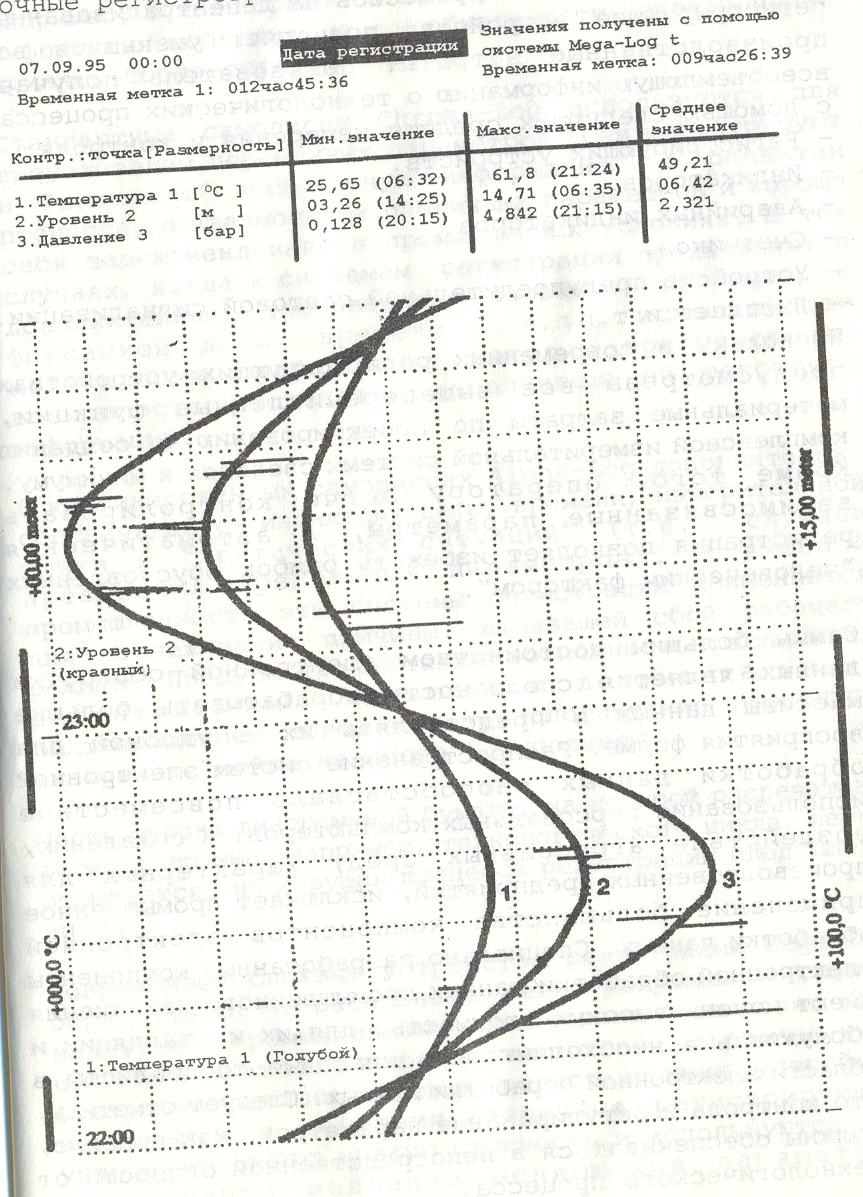
Рис. 8. Регистрограмма, полученная с помощью измерительной системы Mega-Log.
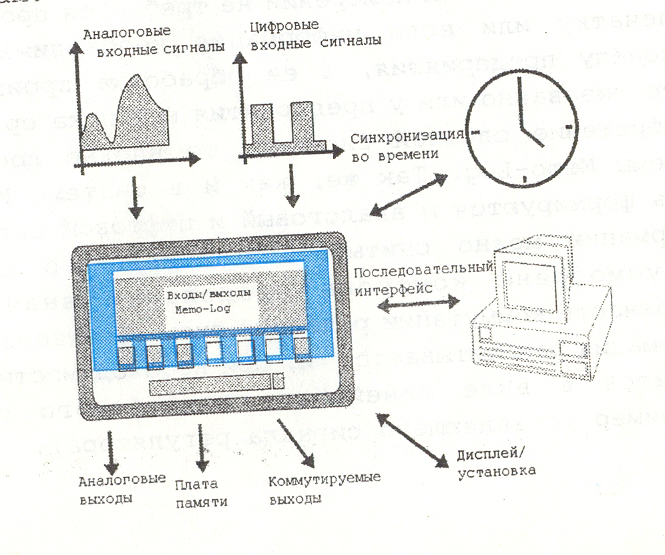
Рис. 9. Измерительная система Mega-Log.
4.5. Устройства связи с объектом (УСО) – это аппаратура, предназначенная для ввода сигналов с датчиков в устройства обработки и вывода сигналов для управления исполнительными механизмами. Каждый модуль УСО имеет выход в технологическую сеть на основе интерфейса. Обработанный сигнал преобразуется модулем в защитный цифровой код для передачи в сеть.
Основные функции УСО: нормализация аналогового сигнала, предварительная низкочастотная фильтрация аналогового сигнала (защита от помех), обеспечение гальванической изоляции между каналами дискретного вывода системы и управляемым силовым оборудованием. УСО могут выполнять и специальные задачи: фильтрацию высоких частот, защиту от перенапряжения и др.
4.6. Промышленные роботы
При комплексной автоматизации необходимо автоматизировать операции обслуживания технологических машин и аппаратов: транспортирование к ним заготовок и деталей, полуфабрикатов и материалов, готовой продукции, а также ее упаковывание, складирование и др. Практика показала, что далеко не все ручные технологические операции можно автоматизировать традиционными техническими средствами автоматики, поэтому и возникла необходимость создания промышленных роботов.
Промышленный робот — это автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций.
К этому определению в стандарте дается примечание: перепрограммируемость — свойство промышленного робота заменять управляющую программу автоматически или при помощи человека-оператора. К перепрограммированию относят изменение последовательности и (или) значения перемещений по степеням подвижности и управляющих функций с помощью средств управления на пульте устройства управления.
Манипулятор — управляемое устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве. Манипулятор оснащен рабочим органом — составной частью исполнительного устройства промышленного робота для непосредственного выполнения технологических операций и (или) вспомогательных переходов.
Благодаря наличию нескольких степеней подвижности и гибкой системе управления, которая легко переналаживается на выполнение различных программ движения манипулятора, робот является многофункциональной машиной. Это отвечает требованиям гибкой перенастройки производства на различные технологические процессы.
Роботы и их системы широкого назначения подразделяют на манипуляционные, мобильные, информационно-управляющие и информационные.
Манипуляционные роботы имеют манипулятор для выполнения двигательных функций, аналогичных функциям руки человека.
Мобильные робототехнические системы отличаются от других наличием движущегося шасси с автоматически управляемыми приводами. Они могут быть колесные, шагающие (локомоционные), колесно-шагающие, гусеничные, плавающие, летающие. Часто мобильные машины включают в себя и манипуляционные роботы и могут применяться во многих отраслях промышленности.
Частого применения ручного труда требует транспортирование продукции и сырья. Здесь объектом робототехники является создание автоматических тележек (робокаров), движущихся по заданной программе и управляемых вычислительной техникой. Программа может легко переналаживаться. Это же относится и к автоматическим подвесным транспортным роботам. При автоматизации всех видов складских работ с помощью робототехнических систем, роботы автоматически обслуживает различные ячейки склада и прибывающие к нему робокары.
Информационно-управляющие робототехнические системы могут не иметь механически движущихся исполнительных устройств. Они, получив информацию от каких-либо внешних источников, ее обрабатывают по определенным алгоритмам и программам (в том числе адаптирующимся к обстановке и к постоянной задаче), выдают результаты на дисплей или другие внешние устройства, а также автоматически вырабатывают необходимые управляющие сигналы на основе результатов обработки. Информационные робототехнические системы могут определять свойства неизвестных объектов в любой среде.
К информационным роботам относятся также и автоматические контрольно-измерительные системы на производстве. Много ручного труда затрачивается на контрольно-измерительные операции. Назначение робототехники — это автоматизация самого процесса контроля и измерения и передача информации о необходимости подналадки и др. Эта задача должна быть решена для завершения комплексной автоматизации производства и ликвидации однообразного ручного труда.
Промышленные роботы классифицируют по различным признакам, а именно: степени универсальности (технологическому назначению), типу системы управления, типу кинематической схемы, грузоподъемности, виду приводов и др.
По степени универсальности (техническому назначению) промышленные роботы бывают универсальными, специализированными и специальными.
Универсальные роботы конструктивно независимы от технологического оборудования и ориентированы на выполнение широкого круга вспомогательных и основных производственных операций.
Специализированные роботы связаны с определенной номенклатурой оборудования, ими можно управлять от автономной или единой с обслуживаемым оборудованием системы управления.
Специальные роботы, как правило, встроены в обслуживаемое оборудование, имеют конструкции, жестко связанные с видом технологической операции, типом деталей и заготовок.
По виду выполняемых технологических операций роботов подразделяют на вспомогательные и технологические.