

§ 4.4. Довжина дуги кривої.
Довжина
![]() дуги кривої
дуги кривої
![]() обчислюється
за формулою
обчислюється
за формулою
![]() .
(4.1)
.
(4.1)
Якщо
крива задана параметричними рівняннями
,
![]()
![]() ,
то формула (3.1) перетворюється до вигляду
,
то формула (3.1) перетворюється до вигляду
 .
(4.2)
.
(4.2)
У
випадку полярних координатах, коли
лінія задана рівнянням
![]() ,
,
![]() ,
довжина дуги визначається формулою
,
довжина дуги визначається формулою
![]() .
(4.3)
.
(4.3)
Приклад
1.
Обчислити довжину дуги параболи
![]() від
до
.
від
до
.
Розв’язання. Застосуємо формулу (4.1). Знайдемо спочатку підінтегральну функцію:
![]() .
.
Обчислюємо довжину (знаходження первісної див. § 3.2, прикл. 2б):
![]() .
.
Якщо крива задана параметричними рівняннями , , то формула (4.1) перетворюється до вигляду
. (4.2)
Довжина
дуги просторової кривої
![]() ,
,
![]() ,
,
![]() обчислюється за формулою
обчислюється за формулою
![]() .
(4.3)
.
(4.3)
Приклад
2.
Знайти довжину дуги астероїди
![]()
![]() від
від
![]() до
до
![]() .
.
Розв’язання. Лінія задана параметричними рівняннями, тому скористаємося формулою (4.2). Маємо:
![]()
![]() ;
;
![]() .
.
У випадку полярних координатах, коли лінія задана рівнянням , , довжина дуги визначається формулою
. (4.4)
Приклад
3.
Обчислити довжину дуги кривої
![]() ,
,
![]() .
.
Розв’язання. Крива задана у полярній системі координат. Застосуємо формулу (4.4):
 .
.
§ 4.5. Обчислення об’єму тіла обертання і площі поверхні обертання
Р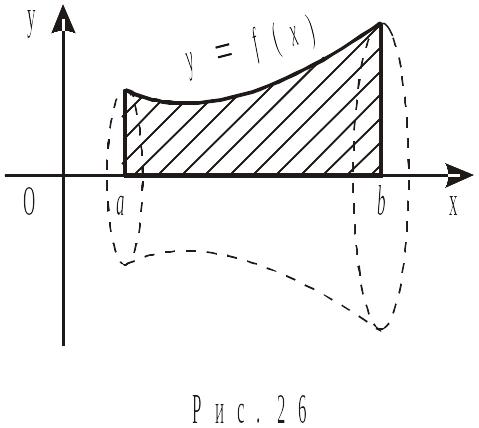 озглянемо
криволінійну трапецію, обмежену лінією
озглянемо
криволінійну трапецію, обмежену лінією
![]() віссю Ох
і двома вертикальними прямими
віссю Ох
і двома вертикальними прямими
![]() (рис.26). Обертаючи цю фігуру навколо осі
Ох,
одержимо тіло у просторі. Об’єм отриманого
тіла обертання і площа поверхні обертання
обчислюються відповідно за формулами:
(рис.26). Обертаючи цю фігуру навколо осі
Ох,
одержимо тіло у просторі. Об’єм отриманого
тіла обертання і площа поверхні обертання
обчислюються відповідно за формулами:
![]() , (5.1)
, (5.1)
![]() .
(5.2)
.
(5.2)
Якщо крива, яка обмежує криволінійну трапецію зверху, задана параметричними рівняннями , , , то
![]() , (5.3)
, (5.3)
![]() .
(5.4)
.
(5.4)
Межі
інтегрування у формулі (5.3) визначаються
рівностями
![]() і
і
![]() (можливі варіанти
(можливі варіанти
![]() або
або
![]() ).
).
Приклад
1.
Плоска фігура, яка обмежена лініями
![]() ,
,
![]() ,
обертається навколо осі Ох. Обчислити:
а) об’єм тіла обертання; б) площу поверхні
обертання.
,
обертається навколо осі Ох. Обчислити:
а) об’єм тіла обертання; б) площу поверхні
обертання.
Розв’язання. а) Побудувавши фігуру (рис.20) і застосувавши формулу (5.1), отримуємо
![]() .
.
б) Використовуючи формулу (5.2), дістаємо
![]()
§ 4.6. Обчислення статичних моментів, моментів інерції та координат центра ваги
При
розв’язанні багатьох задач механіки
та фізики використовуються такі поняття
як статичні
моменти, моменти інерції
та центр
ваги.
Наведемо далі методи обчислення вказаних
величин для криволінійної трапеції та
дуги плоскої кривої (розглядаються
однорідні тіла з густиною
![]() ).
).
Нехай
задана дуга плоскої кривої
,
яка обмежена прямими
і
![]()
![]() .
Статичні моменти дуги відносно
координатних осей (позначаються через
Мх,
Му),
моменти інерції дуги (позначаються
через Іх,
Іу)
та координати центра ваги (позначаються
через
.
Статичні моменти дуги відносно
координатних осей (позначаються через
Мх,
Му),
моменти інерції дуги (позначаються
через Іх,
Іу)
та координати центра ваги (позначаються
через
![]() )
обчислюються за формулами:
)
обчислюються за формулами:
![]() , (6.1)
, (6.1)
![]() , (6.2)
, (6.2)
![]() , (6.3)
, (6.3)
де l – довжина дуги.
Приклад
1. Знайти статичний момент дуги кривої
![]()
![]() відносно осі Ох.
відносно осі Ох.
Розв’язання. Застосовуємо першу з формул (6.1):
![]() ;
;
 .
.
Якщо
дуга задана параметричними рівняннями
![]() ,
то відповідні формули приймають вигляд:
,
то відповідні формули приймають вигляд:
![]() , (6.4)
, (6.4)
![]() , (6.5)
, (6.5)
![]() .
(6.6)
.
(6.6)
Приклад
2. Знайти момент інерції дуги кривої
![]()
![]()
![]() відносно осі Оу.
відносно осі Оу.
Розв’язання. Використовуємо другу з формул (6.5):
 ;
;
![]() ;
;
 .
.
Розглянемо тепер криволінійну трапецію, яка обмежена прямими кривою і віссю Ох (рис. 19). Статичні моменти, моменти інерції та координати центра ваги вказаної фігури обчислюються за формулами:
![]() ,
(6.7)
,
(6.7)
![]() ,
(6.8)
,
(6.8)
![]() , (6.9)
, (6.9)
де S – площа фігури.
Приклад
3. Знайти координати центра ваги плоскої
фігури, яка обмежена дугою параболи
![]() та віссю Ох.
та віссю Ох.
 Розв’язання.
Так як фігура симетрична відносно прямої
(рис. 27), то
Розв’язання.
Так як фігура симетрична відносно прямої
(рис. 27), то
![]() .
Використовуючи формули (6.9), отримуємо:
.
Використовуючи формули (6.9), отримуємо:
 ;
;
![]()
![]() .
.
Якщо
дуга, яка обмежує криволінійну трапецію
зверху, задана параметричними рівняннями
![]() ,
то маємо:
,
то маємо:
![]() ,
(6.10)
,
(6.10)
![]() , (6.11)
, (6.11)
![]() .
(6.12)
.
(6.12)
Межі
інтегрування у формулах (6.10) – (6.12)
визначаються рівностями
![]() ,
тобто
,
тобто
![]() відповідає крайнім лівим точкам
криволінійної трапеції, а
відповідає крайнім лівим точкам
криволінійної трапеції, а
![]() – крайнім правим.
– крайнім правим.
Приклад
4. Знайти момент інерції Іу
плоскої фігури, яка обмежена дугою кола
![]() прямими
прямими
![]() і віссю Ох.
і віссю Ох.
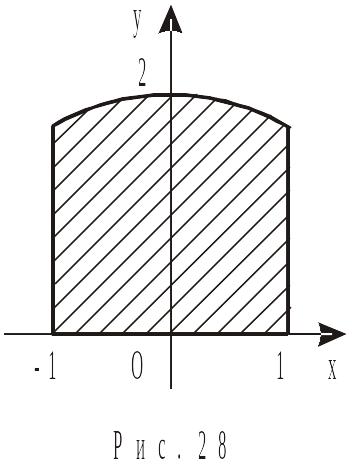 Розв’язання.
Оскільки крива, яка обмежує криволінійну
трапецію зверху (рис. 28) задана
параметричними рівняннями, то
використовуємо другу з формул (6.11).
Знайдемо спочатку межі інтегрування:
Розв’язання.
Оскільки крива, яка обмежує криволінійну
трапецію зверху (рис. 28) задана
параметричними рівняннями, то
використовуємо другу з формул (6.11).
Знайдемо спочатку межі інтегрування:
![]()
![]() .
.
Визначаємо момент інерції:

 .
.