

Кинематика
Введение в кинематику
Кинематикой называется раздел механики, в котором изучается движение материальных тел в пространстве, вне связи с силами, определяющими это движение.
Механическое движение, т.е. происходящее во времени изменение положения одного тела относительно другого, рассматривается в системе отсчета, которая и связана с этим другим телом.
Система отсчета может быть как движущейся, так и условно неподвижной. При изучении движений на Земле за неподвижную систему отсчета (НСО) принимают систему координатных осей, неизменно связанных с Землей. Тело, положение которого по отношению к выбранной системе отсчета не изменяется, находится в состоянии относительного покоя (по отношению к этой системе отсчета).
Пространство в механике рассматривается как трехмерное евклидово пространство. За единицу длины при измерении расстояний принимается метр (м). За единицу времени принимается одна секунда (с). Все кинематические характеристики движения твердого тела (расстояния, скорости, ускорения) рассматриваются как функции времени.
2.2. Координатный способ задания движения точки
Р
Рис. 2.1
Рис. 2.1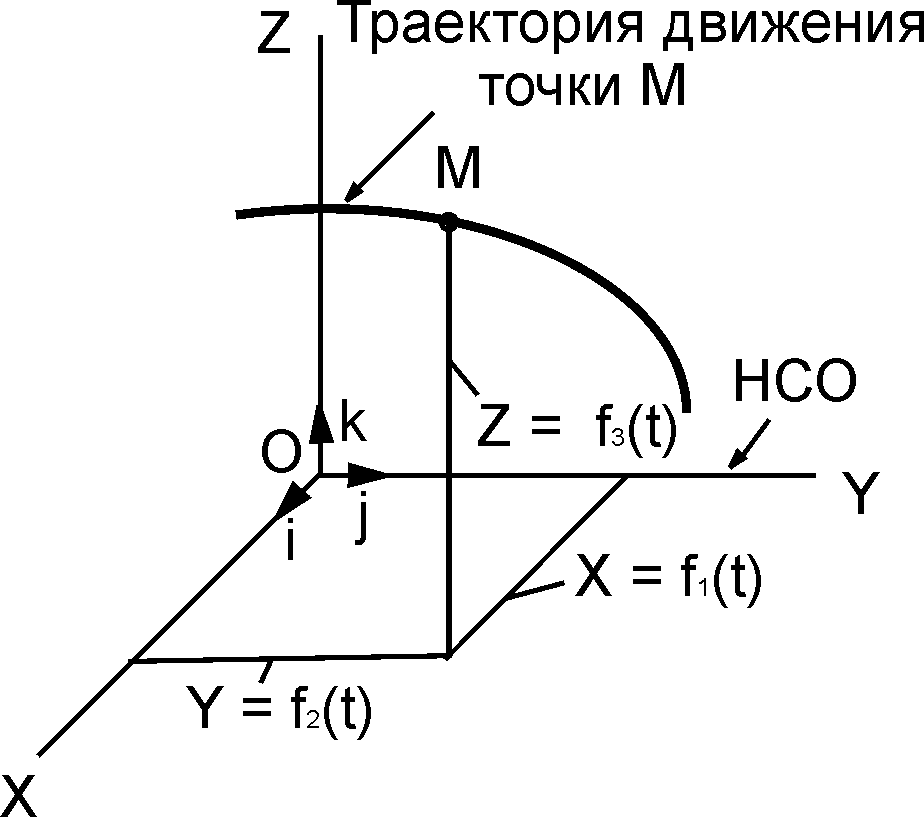
Систему трех уравнений X = f1(t); Y = f2(t); Z = f3(t) называют уравнениями движения точки в пространстве в декартовых координатах.
Пример: X = 10t2+1; Y = 7t3+t2+1; Z = 10sin(πt). Действительно, имея эти уравнения, можно для любого момента времени найти соответствующие координаты X, Y, Z и по ним определить положение точки в пространстве в этот момент времени.
Д
Рис. 2.2
Пример. X = 3t2+t2+t;
Y = 7cos(πt).
Уравнения движения, определяющие координаты точки в любой момент времени, рассматривают как параметрические уравнения траектории точки. При исключении параметра t из уравнений движения получают уравнение траектории точки в координатной форме.
Пример. Заданы уравнения: X = 4t (см); Y = 16t2 –1 (см) движения точки в плоскости XOY. Определить вид траектории движения точки, построить ее график и найти положение точки на траектории движения в момент времени t1 = 0,5 с.
Р
М
Рис. 2.3
М
Рис. 2.3
Y = 16(X/4)2 – 1 = X2 – 1.
Выражение Y = X2 – 1 есть уравнение параболы (y = ax2+bx+c) с вершиной в точке с координатами (0, – 1). В момент времени t1 =0,5 с определяем координаты:
X(t1) = 4t1 = 4·0,5 = 2 см > 0;
Y(t1) = 16(t1)2 –1 = 16·(0,5)2 –1 = 3 см >0.
Показываем положение точки на траектории ее движения (рис. 2.3).
Пример. Дано: X = 3sin(πt), см (1); Y = 3cos(πt), см (2); t1 = 0,25 c. Определить вид траектории движения точки и ее положение на траектории движения в момент времени t1.
Решение. Уравнения движения точки представим в следующем виде: (X)2 = (3sin(πt))2 (11); (Y)2 = (3cos(πt))2 (21). Для решения используем тригонометрическую формулу sin2(α)+cos2(α) = 1.
С
Рис. 2.4
М
Рис. 2.4
М
Определяем положение точки на траектории движения в момент времени t1.
X(t1) = 3sin(πt1) = 3sin(π·0,25) = 3·0,707 = 2,121 см > 0.
Y(t1) = 3cos(πt1) = 3cos(π·0,25) = 3·0,707 = 2,121 см > 0.
Показываем точку на траектории ее движения (см. рис. 2.4).
ВНИМАНИЕ! Если точка не попадает на траекторию движения, то:
1) неверно определен вид траектории движения;
2) неверно рассчитаны координаты X(t1), Y(t1).
Прямолинейное движение точки М определяется одним уравнением движения X = f(t).
Рис. 2.5
Пример.
X=10t2+sin(2πt)+3, см (рис. 2.5). Определить положение точки на траектории движения в начальный момент времени t0 = 0 и в момент времени t1 = 1 c.
Решение.
X(t0) = 10(t0)2+sin(2πt0)+3 = 10·02+sin(2π·0)+3 = 3 см > 0.
X(t1) = 10(t1)2+sin(2πt1)+3 = 10·12+sin(2π·1)+3 = 13 см > 0.
Значения координат X(t0), X(t1) наносим на рис. 2.5.