

8. Какие компоненты включает в себя структурная схема измерительной системы с цифровой передачей информации?
Большие возможности для организации сбора измерительной информации в настоящее время представляют АЦП, выполненные по интегральной технологии. Их малые габаритные размеры и мощность потребления позволяют конструктивно объединять АЦП с каждым ИП объекта и организовывать непосредственную передачу через КС информации в цифровой форме. На приёмной стороне после выделения цифрового информационного сигнала осуществляется ряд операций обработки (усреднение, сравнение, вычитание постоянных составляющих, накопление и хранение информации и др.), которые выполняются устройством цифровой обработки (УЦО).
Для организации управления процессом измерения в систему вводится логическое управляющее устройство, работающее по “жёсткому” алгоритму и получившее название “системный, или приборный контроллер”. В функцию контроллера входит автоматическое задание длительности такта измерения каждого параметра, переключение коммутатора, управление индикацией, регистрацией и цифровой обработкой результатов измерений. В настоящее время часто используют контроллеры с программно-управляемым принципом функционирования на основе микропроцессорных комплектов БИС, который позволяет сделать боле глубоким, легко перестраиваемым весь алгоритм работы системы.
Приведите примеры измерительной цепи на основе делителя напряжения и на основе неравновесной мостовой схемы.
Преобразование измеряемой физической величины в электрический сигнал для параметрических ИП осуществляется в основном путем включения чувствительных элементов в цепи, состоящие из делителей тока и напряжения или мостовых схем постоянного и переменного тока. На рис.4 показан ИП, выполненный по схеме делителя напряжения.
UВЫХ=UИПRP/(RO+RP) = UИП/(1+RO/RP)
В одном плече делителя включен тензорезисторный чувствительный элемент, сопротивление Rp которого является функцией давления (силы) Р. С целью компенсации постоянной составляющей выходного сигнала широкое распространение получили измерительные мостовые схемы преобразования (рис.5), питание которых осуществляется как постоянным, так и переменным напряжением.

Рис.4. Измерительная цепь на основе делителя напряжения
Мостовая схема считается уравновешенной, если в выходной диагонали отсутствует разность потенциалов, и, наоборот, неуравновешенной, если в диагонали появляется напряжение UВЫХ.
UВЫХ = UИП [R2/(R1+R2)-R4/(R3+R4)]
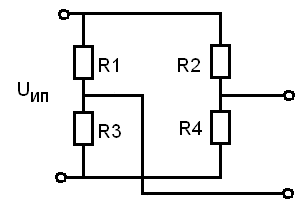
Рис.5. Измерительная цепь на основе неравновесной мостовой схемы
Приведите структурную схему измерительной цепи, использующую метод статического уравновешивания.
Измерительные преобразователи, основанные на методе уравновешивания, имеют структуру с обратной связью. Обратная связь состоит из усилителя разбаланса с коэффициентом передачи К и цепи обратного преобразования ОП с коэффициентом передачи Кос.

Рис.6. Измерительная цепь, использующая метод статического уравновешивания
Элемент сравнения (мост) вырабатывает сигнал рассогласования между входной измеряемой величиной X (параметрический ИП температуры окружающей среды RK) и выходным сигналом обратного преобразования (нагревательный элемент RH). Косвенный подогрев резистора RК током обратной связи приводит к уравновешиванию мостовой схемы. Мостовая схема всегда работает в режиме, близком к равновесному.
С точки зрения теории автоматического управления, такие преобразователи получили название "ИП уравновешивания со статической характеристикой". В таких ИП уменьшить ошибку можно путем увеличения коэффициента передачи. К цепи прямого преобразования, но при очень больших значениях этого коэффициента в них могут возникнуть автоколебания.