

4. Дистанційне вимірювання температури за допомогою термопари
У випадку використання
термопари як датчика температури для
дистанційних вимірювань холодні кінці
термопари підключають безпосередньо
до контактів магнітоелектричного
приладу (рис. 4.1), шкала якого тарується
безпосередньо в градусах
.
Розрахунок такого датчика передбачає
побудову статичної характеристики
![]() при
при
![]() і визначення похибки
і визначення похибки
![]() за шкалою приладу при можливому
відхиленні температури навколишнього
середовища
за шкалою приладу при можливому
відхиленні температури навколишнього
середовища
![]() від значення
,
при котрому була тарована шкала приладу.
від значення
,
при котрому була тарована шкала приладу.
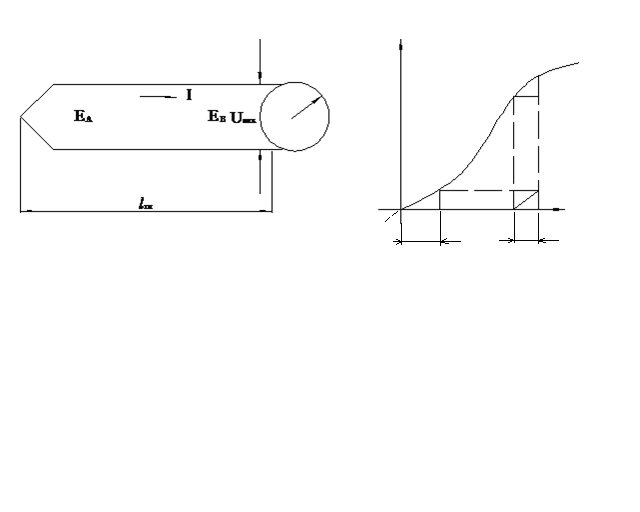

Рис. 4.1. Схема
термоелектричного датчика температури
Рис. 4.2. До
визначення похибки термодатчика
Спосіб побудови статичної характеристики датчика відрізняється від способу побудови статичної характеристики вимірювального елемента, описаного в розділі 2, тільки заміною на .
Визначення похибки тарування,
викликане нестабільністю
,
можна провести графічно та аналітично.
За відсутності похибки температурі
відповідає
у вигляді відрізка МС (рис. 4.2), при
відхиленні
![]() зобразиться відрізком MD,
меншим від МС, на DС=АВ.
Якщо відрізок MD
переміщувати вліво паралельно
самому собі так, щоб точка М рухалась
по характеристиці, то точка D
потрапить на вісь абсцис у
точку Q і
визначить похибку тарування
зобразиться відрізком MD,
меншим від МС, на DС=АВ.
Якщо відрізок MD
переміщувати вліво паралельно
самому собі так, щоб точка М рухалась
по характеристиці, то точка D
потрапить на вісь абсцис у
точку Q і
визначить похибку тарування
![]() .
Міркування, які випливають із геометричних
співвідношень, зображених на рис. 4.2,
дозволяють обчислити цю похибку
.
Міркування, які випливають із геометричних
співвідношень, зображених на рис. 4.2,
дозволяють обчислити цю похибку
![]() ,
(4.1)
,
(4.1)
де
![]() і
і
![]() є
є
![]() відповідно при
відповідно при
![]() та поточному значенні
.
та поточному значенні
.
На пологій ділянці характеристики
![]() .
.
Задача 3
Розрахувати характеристики термопари для роботи в режимі датчика температури при дистанційних вимірюваннях.
Вихідні дані
Діапазон вимірюваної температури –
 .
.
Тарування приладу при температурі навколишнього середовища –
 .
.
Можливі відхилення температури навколишнього середовища –
 .
.
Довжина провідників термопари –
 .
.
Опір приладу –
 .
.
Відповідні значення вихідних даних узяти з таблиці 4.1 згідно з варіантом.
Завдання
Розрахувати статичну характеристику датчика температури на основі термопари для дистанційних вимірювань.
Визначити похибку тарування датчика.
Таблиця 4.1
Значення вихідних даних для варіаінтв завдань задачі 4
№ |
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
1 |
0-800 |
20 |
40 |
20 |
100 |
2 |
0-400 |
15 |
20 |
15 |
60 |
3 |
0-500 |
20 |
30 |
10 |
70 |
4 |
0-600 |
10 |
40 |
5 |
80 |
5 |
0-700 |
15 |
10 |
20 |
90 |
6 |
0-600 |
20 |
20 |
15 |
100 |
7 |
0-500 |
10 |
30 |
10 |
70 |
8 |
0-400 |
15 |
40 |
5 |
80 |
9 |
0-300 |
10 |
30 |
5 |
90 |
10 |
0-300 |
25 |
20 |
20 |
70 |
11 |
0-700 |
10 |
20 |
10 |
70 |
12 |
0-600 |
20 |
30 |
15 |
80 |
13 |
0-500 |
30 |
40 |
20 |
90 |
14 |
0-400 |
10 |
20 |
5 |
100 |
15 |
0-300 |
20 |
30 |
10 |
70 |
16 |
0-400 |
30 |
40 |
15 |
80 |
17 |
0-500 |
10 |
20 |
20 |
90 |
18 |
0-600 |
20 |
30 |
5 |
100 |
19 |
0-700 |
30 |
40 |
10 |
70 |
1 |
2 |
3 |
4 |
5 |
6 |
20 |
0-800 |
10 |
20 |
15 |
80 |
21 |
0-900 |
20 |
30 |
20 |
90 |
22 |
0-1000 |
30 |
40 |
10 |
100 |
Порядок розрахунку
За заданим діапазоном згідно з таблицею 2.1 вибрати відповідну термопару з оптимальним перерізом її провідників
 ;
;
 .
.
Використовуючи дані таблиці 2.2, за формулою (2.3) знайти , Ом,
![]() ,
Ом.
,
Ом.
Скориставшись співвідношенням (2.2), обчислити напругу на виході
 вимірювального елемента в режимі
холостого ходу в робочому діапазоні
температур з вибраним сталим кроком
(прийняти Ев =
0, оскільки сплав В відсутній). Дані
записати в робочу таблицю:
вимірювального елемента в режимі
холостого ходу в робочому діапазоні
температур з вибраним сталим кроком
(прийняти Ев =
0, оскільки сплав В відсутній). Дані
записати в робочу таблицю:
![]() ,
В
,
В
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
Розрахувати статичну характеристику, тобто напругу на виході вимірювального елемента, при реальному навантаженні в робочому діапазоні температур
 ,
В.
,
В.
Побудувати графік
 .
.
6. Визначити
границі значень K(min,
max) при
температурах
![]() та
.
та
.