

4.3. Расчет параметров задатчика интенсивности
Задание на вход системы подается через задатчик интенсивности (ЗИ). Необходимо рассчитать его постоянную времени Тзи по соотношению:
![]() (4.16)
(4.16)
где
время разгона электропривода
![]() ,
,
Структурная схема задатчика интенсивности приведена на рис. 4.1. При этом Uогр = 1 В. Пуск от ЗИ осуществляется для возможности обеспечения постоянного ускорения, а также во избежание интенсивных колебаний момента и тока, которые будут наблюдаться при прямом пуске. При работе от ЗИ графики переходных процессов тока и скорости будут отличаться от типовых реакций контуров, настроенных на соответствующие оптимумы, при ступенчатом изменении задающего воздействия. Задание на систему от ЗИ подается с задержкой 0,05 – 0,1 с. Это необходимо для того, чтобы поток в двигателе вышел на номинальное значение. Поэтому вначале подается напряжение Uзп =10 В.
ЗИ в пакете MATLAB можно собирать как по структурной схеме, которая приведена на рис.4.1, так и с помощью блока Look-Up-Table (рис. 4.2). В этом случае Тзи нужно принять равным времени разгона tp. При использовании схемы ЗИ рис. 4.1 Тзи принимаем равным 0,1∙tp.
Рисунок 4.1 – Структурная схема ЗИ |
|
Рисунок 4.2 – Схема ЗИ на основе блока Look-Up-Table |

5. Порядок выполнения курсового проекта
1. Составить математическое описание модели двигателя в системах координат: α, β; x, y; d, q. Один из вариантов модели в системе координат α, β представлен системой уравнений (3.25) – (3.27).
1.1. Начертить структурные схемы АД в системах координат α, β; x, y; d, q. Для математической модели в системе координат α, β (3.25) – (3.27) структурная схема приведена на рис. 3.7.
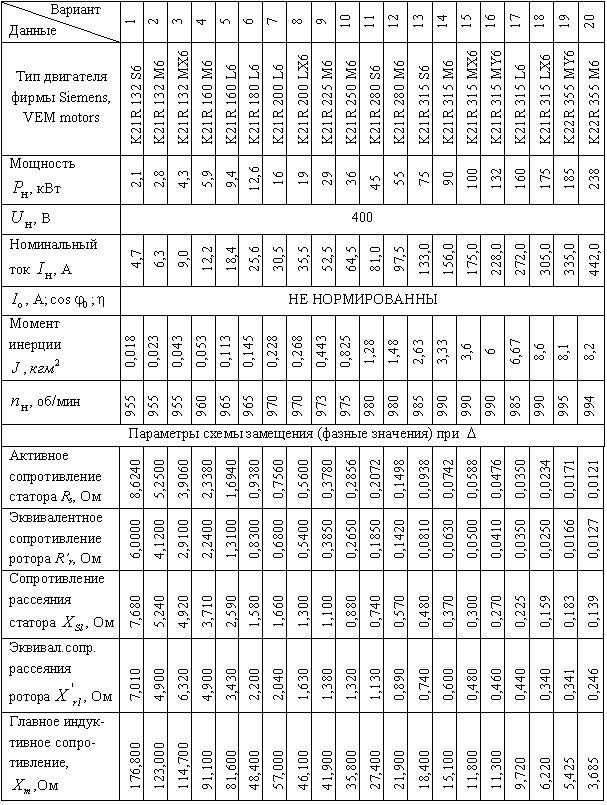
1.2. По формулам разд. 4 выбрать и рассчитать параметры двигателя: скорость вращения, номинальный момент, параметры обмоток ротора и статора, необходимые для построения структурных схем коэффициенты и постоянные времени.
1.3. Набрать структурные схемы АД в системах координат α, β; x, y; d, q в программе “Matlab” и исследовать переходные процессы (t), M(t), Is(t), Ir(t), Ψr(t) для режима разгона АД на холостом ходу и наброса нагрузки в установившемся режиме. Для моделирования необходимо использовать схемы задания напряжения обмоток статора в соответствии с уравнениями (3.10), (3.12), (3.15). Соответствующие схемы приведены на рис. 3.5 – 3.6. Примеры графиков переходных процессов даны в приложении 2 (рис. П 2.1 – П 2.4).
2. Составить математическую модель двигателя во вращающейся системе координат d, q в соответствии с уравнениями (3.24), (3.35) – (3.36). Начертить структурную схему двигателя (рис. 3.8). Набрать структурную схему АД в программе “Matlab” и исследовать переходные процессы (t), M(t), isq(t), isd(t), Ψr(t) для режима разгона АД на холостом ходу и наброса нагрузки в установившемся режиме. Для задания питающих напряжений обмотки статора использовать уравнения (3.15). Примеры графиков переходных процессов даны в приложении 2 (рис. П 2.5).
3. Построить систему векторного управления асинхронного двигателя.
3.1. Составить математическую модель двигателя во вращающейся системе координат, ориентированной по потокосцеплению ротора в соответствии с уравнениями (3.24), (3.40) – (3.44) и начертить структурную схему двигателя (рис. 3.9).
3.2. По формулам разд. 4 рассчитать параметры регуляторов.
3.3. Начертить структурную схему системы векторного управления (рис. 3.10), набрать ее в программе “Matlab” и исследовать переходные процессы (t), M(t), isq(t), isd(t), r(t).
а) С учетом всех присутствующих в схеме АД перекрестных связей и обратной связи по ЭДС двигателя необходимо провести исследования при следующих режимах работы:
● разгон системы на холостом ходу от задатчика интенсивности, а также наброс нагрузки во время разгона;
● разгон системы на холостом ходу от задатчика интенсивности с набросом нагрузки в установившемся режиме.
б) Без учета в структуре АД как перекрестных связей, так и обратной связи по ЭДС двигателя в тех же режимах;
в) С учетом в структуре АД только перекрестных связей и без учета обратной связи по ЭДС в тех же режимах работы;
г) Без учета только перекрестных связей в объекте управления в тех же режимах работы;
д) С учетом всех присутствующих в структуре АД перекрестных связей и обратной связи по ЭДС двигателя с компенсацией этих связей, поступающей на входы ПЧ через датчик напряжения;
е) С помощью приведенных в разд. 3.7 преобразователей координат получить реальные трехфазные токи двигателя при пуске. Для получения реальных трехфазных токов двигателей необходимо преобразователи координат (рис. 3.13 – 3.14) подключить к соответствующим точкам схемы (рис. 3.9). Примеры графиков переходных процессов даны в приложении 2 (рис. П 2.6 – рис П 2.17). Провести анализ полученных переходных процессов.
Пояснительная записка должна содержать:
1. Цель работы.
2. Задание со всеми исходными данными.
3. Расчеты параметров математических моделей АД в системах координат α, β; x, y; d, q и регуляторов.
4. Структурные схемы двигателя в системах координат α, β; x, y; d, q; системы векторного управления, а также преобразователей координат.
5. Графики переходных процессов в соответствии с разделом 5.
6. Анализ полученных результатов.
7. Список литературы.
Оформление пояснительной записки должно выполняться в соответствии со стандартами НТУ «ХПИ» [10, 11].
СПИСОК ЛИТЕРАТУРЫ
1. Слежановский О. В. Системы подчиненного регулирования электропривода переменного тока с вентильными преобразователями / О. В. Слежановский – М. : Энергоатомиздат, 1983.
2. Ключев В. И. Теория электропривода : учеб. для вузов / В. И. Ключев – 2-е изд. перераб. и доп. – М. : Энергоатомиздат, 2001.
3. Крановое электрооборудование: Справочник / Ю. В. Алексеев, А. П. Богословский, Е. М. Певзнер и др.; под. ред. А. А. Рабиновича – М. : Энергия, 1979.
4. Вешеневский С. Н. Характеристики двигателей в электроприводе / С. Н. Вешеневский. – М. : Энергия, 1977.
5. Перельмутер В. М. Прямое управление моментом и током двигателей переменного тока / В. М. Перельмутер. – Х.: Основа, 2004.
6. Ковач К. П. Переходные процессы в машинах переменного тока / К. П. Ковач, И. Рац. – М., Л. : Энергоатомиздат, 1963.
7. Поздеев А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах / А. Д. Поздеев. – Чебоксары : Изд-во Чуваш. ун-та, 1998.
8. Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0 : учеб. пособ. / С. Г. Герман-Галкин. – СПб.: Корона, 2001.
9. Акимов Л.В., Малахова А.Ю. Исследование системы векторного управления частотно-регулируемым асинхронным электроприводом: учеб. метод. пособие к научно-исследовательской работе по курсу «Автоматическое управление электроприводами» / Л.В. Акимов, А.Ю. Малахова. – Х.: НТУ «ХПИ», – 2005. – 31с.
10. СТВУЗ – ХПИ – 3.01 – 2006. Текстовые документы в сфере учебного процесса. Общие требования к выполнению / исполн. Л. Л. Товажнянский [и др.]. – Х. : Учебно-методическое управление НТУ "ХПИ", 2001. - 40 с. Утвержден и введен в действие приказом ректора НТУ «ХПИ» №215-1 от 18.04.2006 г.
11. СТВУЗ – ХПИ – 3.03 – 2006. Конструкторские документы в сфере учебного процесса. Утвержден и введен в действие приказом ректора НТУ «ХПИ» №336-1 от 11.07.2006 г.
Приложение 1
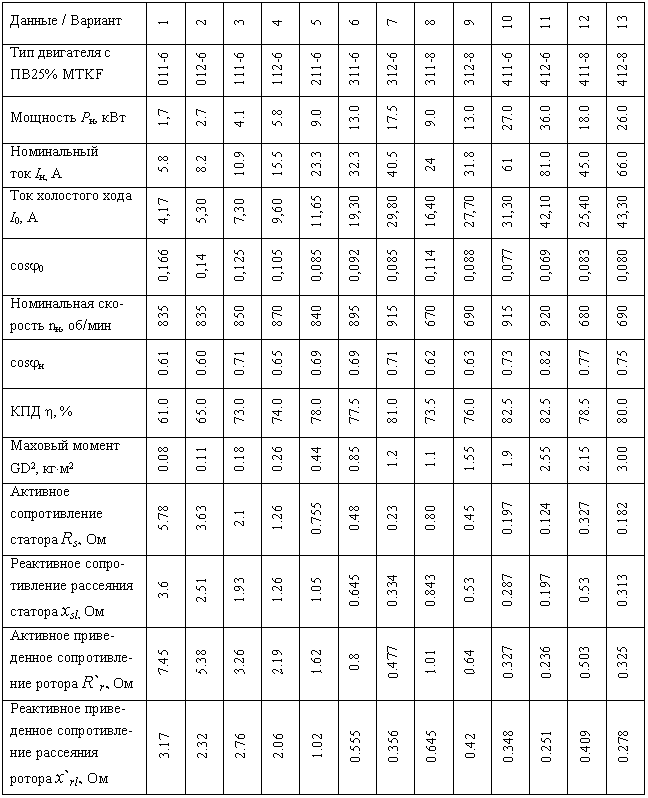
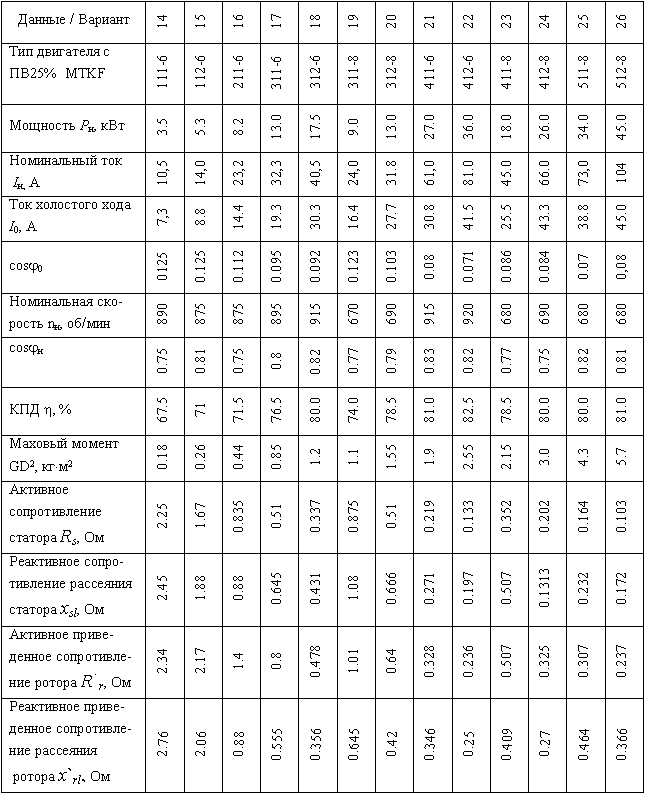
Таблица П.1 Технические характеристики АД серии MTKF [3, 4]
Продолжение приложения 1
Продолжение таблицы П.1
Продолжение приложения 1
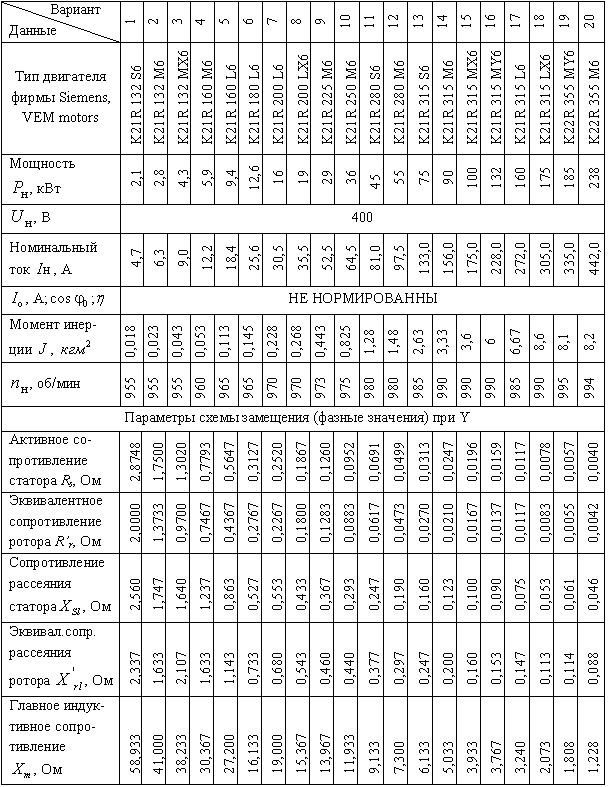
Таблица П.2 Технические характеристики АД типа VEM motors
Продолжение приложения 1
Продолжение таблицы П.2
Приложение 2
Примеры графиков переходных процессов
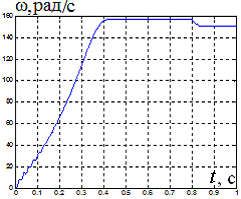
Рисунок П 2.1 – Скорость АД при набросе номинальной загрузки
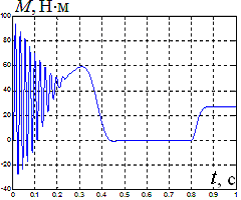
Рисунок П 2.2 – Момент АД при набросе номинальной нагрузки, Н·м
Продолжение приложения 2
t, с
Is,
A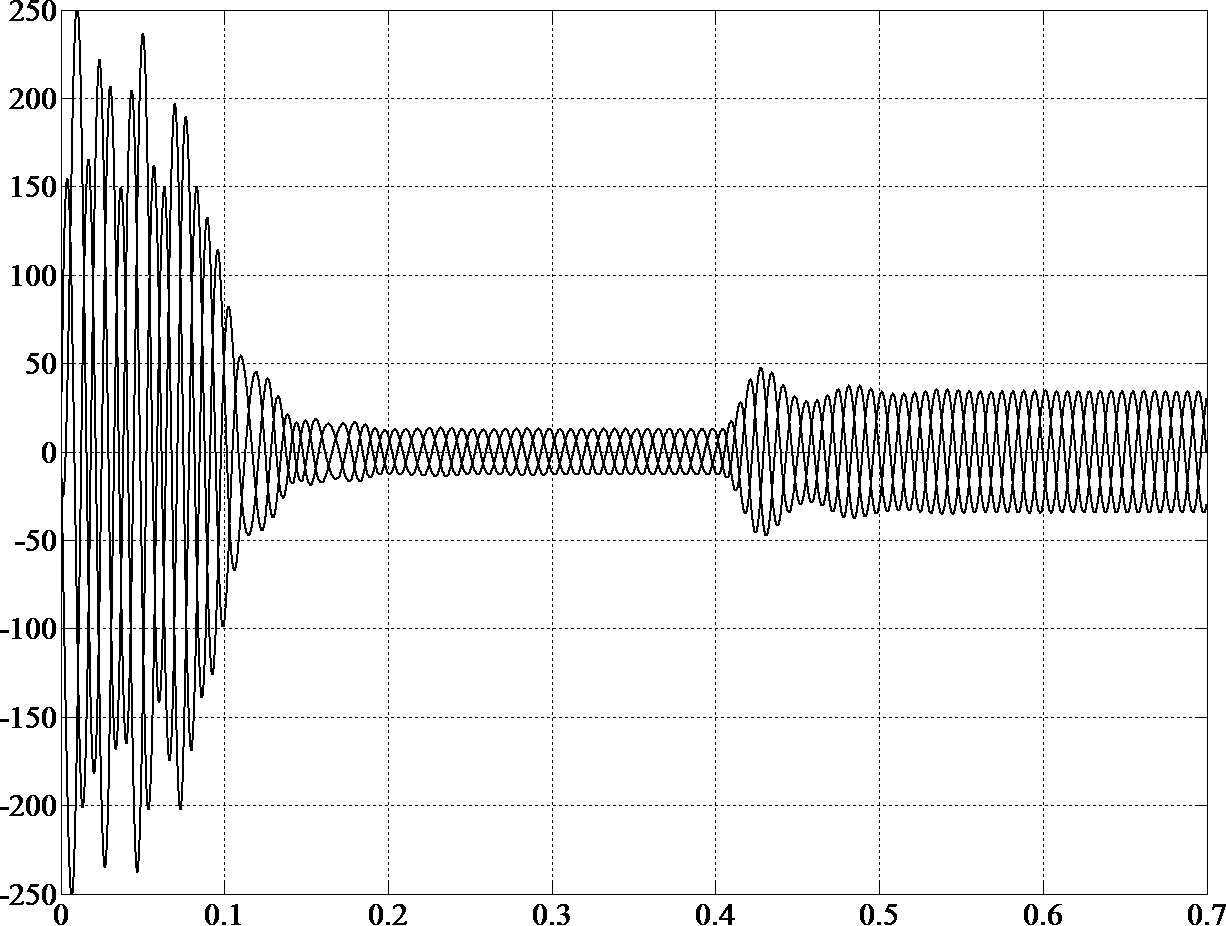
Рисунок П 2.3 – Токи статора АД при набросе номинальной загрузки

Рисунок П 2.4 – Переходные процессы ω и М в АД во вращающейся системе координат при Мс = Мн
Продолжение приложения 2
Ir,
A
t, с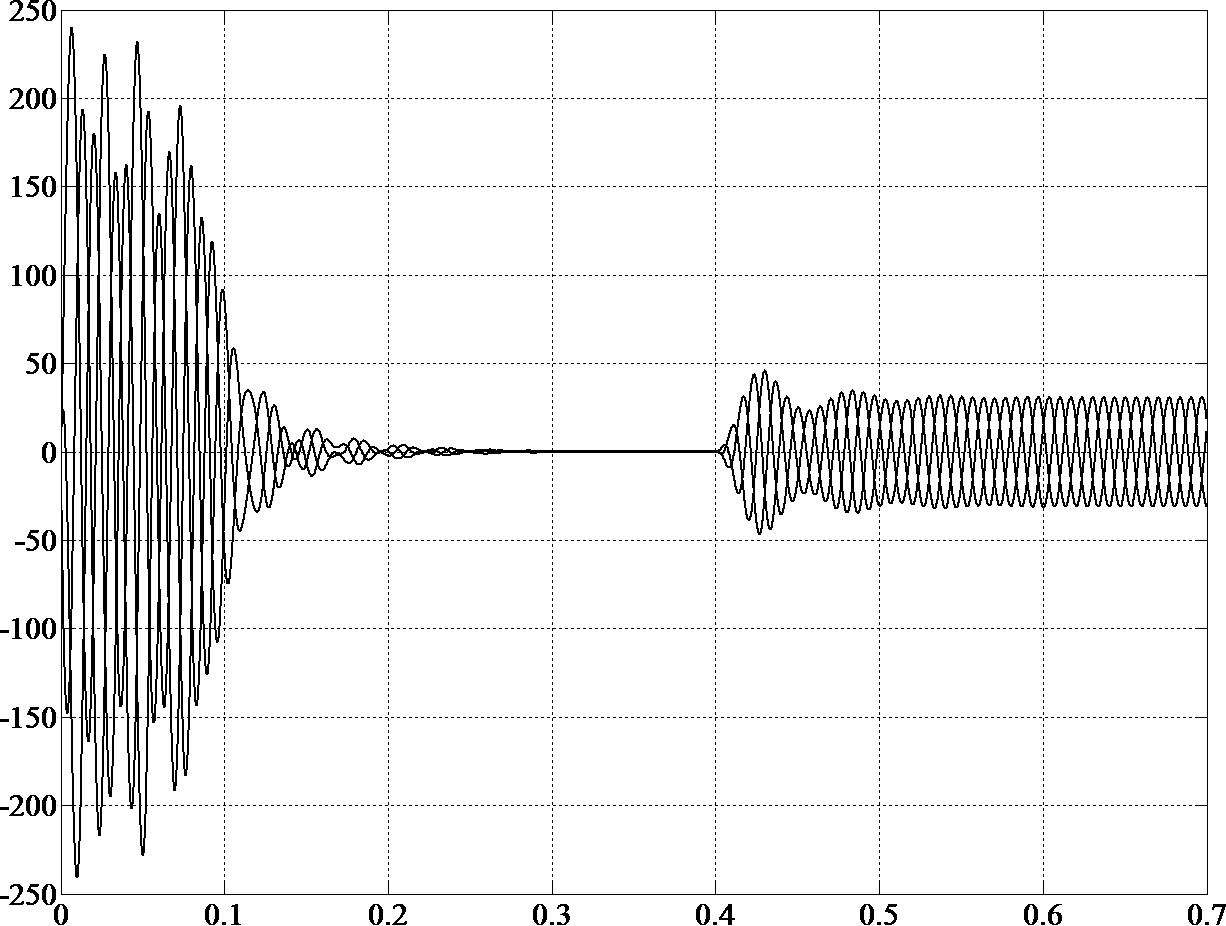
Рисунок П 2.5 – Токи ротора АД при набросе номинальной нагрузки
ω, с-1
М, Н·м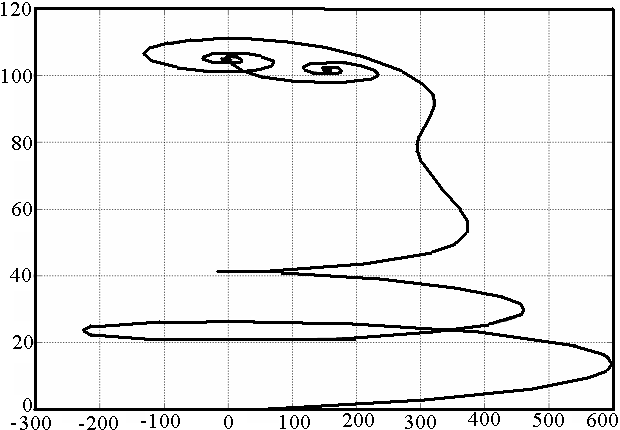
Рисунок 2.6 – Динамическая механическая характеристика АД при пуске на холостом ходу и набросе нагрузки МН=МС в установившемся режиме
Продолжение приложения 2
Isq∙2,
A; Isd,
A; ω∙10-1,
с-1 M,
Н∙м; ψ∙10,
Вб
t, c
Рисунок П 2.7 – Разгон на холостом ходу с набросом нагрузки при t=0,3c с учетом всех перекрестных связей и ОС по ЭДС
Isq∙2,
A; Isd,
A; ω∙10-1,
с-1 M,
Н∙м; ψ∙10,
Вб

Рисунок П 2.8 – Разгон с набросом нагрузки во время разгона с учетом всех перекрестных связей и ОС по ЭДС
Продолжение приложения 2
Isq∙2,
A; Isd,
A; ω∙10-1,
с-1 M,
Н∙м; ψ∙10,
Вб
Рисунок П 2.9 – Разгон на холостом ходу с набросом нагрузки
при t=0,3c без учета всех ОС
Isq∙2,
A; Isd,
A; ω∙10-1,
с-1 M,
Н∙м; ψ∙10,
Вб
Рисунок П 2.10 – Разгон с набросом нагрузки во время разгона
без учета всех ОС
Продолжение приложения 2
Рисунок П 2.11 – Разгон на холостом ходу с набросом нагрузки при t=0,3c без учета перекрестных связей, но с учетом ОС по ЭДС

Рисунок П 2.12 – Разгон с набросом нагрузки во время разгона без
учета перекрестных связей, но с учетом ОС по ЭДС
Продолжение приложения 2
Isq∙2,
A; Isd,
A; ω∙10-1,
с-1 M,
Н∙м; ψ∙10,
Вб
Рисунок П 2.12 – Разгон на холостом ходу с набросом нагрузки при t=0,3c без учета ОС по ЭДС, но с учетом перекрестных связей
Рисунок П 2.13 – Разгон с набросом нагрузки во время разгона без учета ОС по ЭДС, но с учетом перекрестных связей
Продолжение приложения 2

Рисунок П 2.14 – Разгон на холостом ходу с набросом нагрузки при t=0,3c с компенсацией перекрестных связей

Рисунок П 2.15 – Разгон при набросе нагрузки во время разгона с
компенсацией перекрестных связей
Продолжение приложения 2
IА,
A; IВ,
A; IС,
A
Рисунок П 2.16 – Трехфазные токи при пуске от ЗИ на холостом ходу
Рисунок П 2.17 – Трехфазные токи при пуске от ЗИ под нагрузкой
СОДЕРЖАНИЕ
Вступление 3
1. Задание на проектирование 4
2. Полупроводниковые преобразователи частоты 5
3. Выбор математической модели АД 9
3.1. Обоснование выбора математической модели 9
3.2. Модели АД в двухфазных ортогональных системах
координат 12
3.2.1. Модель в системе координат α, β 17
3.2.2. Модель в системе координат x, y 18
3.2.3. Модель в системе координат d, q 19
3.3. Электромагнитный момент асинхронного двигателя 21
3.4. Математическая модель АД с короткозамкнутым
ротором 23
3.5. Математическая модель и структурная схема АД в системе координат d, q, ориентированной по потокосцеплению ротора 24
3.6. Структурная схема системы векторного управления 32
3.7. Преобразователи координат 32
4. Расчет параметров объекта управления и регуляторов 37
4.1. Расчет параметров АД и ПЧ 37
4.2. Расчет параметров регуляторов 38
4.2.1. Внутренние контуры токов 38
4.2.2. Контур потокосцепления ротора 39
4.2.3. Контур скорости 40
4.2.4. Расчет датчика напряжения контура компенсации 40
4.3. Расчет параметров задатчика интенсивности 41
5. Порядок выполнения курсового проекта 42
Список литературы 45
Приложение 1. Технические характеристики АД серии MTKF 46
Приложение 2. Примеры графиков переходных процессов 50
Навчальне видання