

2.2. Индуктивные датчики (преобразователи)
Индуктивные преобразователи используют при необходимости проведения более точного контроля линейных размеров.
Рассмотрим принцип действия индуктивного преобразователя (рис. 10). Высота контролируемого изделия 1 определяет положение измерительного штока 2 и якоря 3, расположенного между сердечниками 4 и 5, на которых помещены катушки индуктивности. Индуктивность этих катушек зависит от магнитного сопротивления их магнитопроводов, состоящих из сердечников, якоря и воздушных зазоров между якорем и сердечниками. Чем больше воздушный зазор, тем больше магнитное сопротивление магнитопровода, меньше магнитный поток и, следовательно, меньше индуктивность катушки. Таким образом, при увеличении высоты детали увеличивается зазор между якорем и нижним сердечником 5 и уменьшается зазор ∆ между якорем и верхним сердечником 4. Это вызывает уменьшение индуктивности катушки на сердечнике 5 и ее увеличение на сердечнике 4.
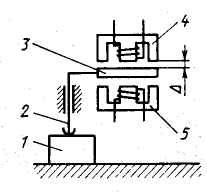
Рис. 10. Схема дифференциального индуктивного преобразователя
Для
получения высокой чувствительности и
линейной характеристики индуктивные
датчики объединяют попарно, получая
дифференциальный индуктивный
датчик с двумя сердечниками и одним
общим якорем (рис. 11,
а). В таком датчике при перемещении
якоря в соответствии с размером детали
изменяются зазоры
![]() и
и
![]() — один из них возрастает, второй
настолько же уменьшается. Соответственно
изменяется и индуктивность обмоток
датчика L1
и L2.
— один из них возрастает, второй
настолько же уменьшается. Соответственно
изменяется и индуктивность обмоток
датчика L1
и L2.
Благодаря
этому чувствительность дифференциального
индуктивного датчика
примерно вдвое превышает чувствительность
простого датчика. Обмотки
датчика включают в
электрическую схему мостового типа.
Два плеча моста образуют индуктивные
сопротивления
![]() и
и
![]() ,
а два других плеча активные сопротивления
,
а два других плеча активные сопротивления
![]() и
и
![]() .
Активные сопротивления
и
подбирают таким образом, чтобы при
среднем положении якоря (
.
Активные сопротивления
и
подбирают таким образом, чтобы при
среднем положении якоря (![]() =
=![]() )
соблюдалось условие:
=
и
=
.
В
этом случае мост будет находиться в
равновесии
и при подаче напряжения ток в измерительной
диагонали АБ
отсутствует.
При подводе к наконечнику детали якорь
сместится из среднего
положения, равновесие моста нарушится,
и в обмотках датчика появятся токи I1
и I2
(рис. 11, б), а в диагонали ток I
= I1-I2
- фиксируемый прибором
ИП.
Благодаря высокой чувствительности и
линейности характеристику (рис.
11, б)
дифференциальные
индуктивные датчики получают все более
широкое
применение в контрольно-измерительных
приборах и устройствах. Большинство
из них работает на частоте источника
питания 50 Гц при стабилизированном
напряжении 10—30 В. При особо высоких
требованиях к чувствительности
и точности работы датчиков частоту
питающего напряжения
увеличивают до 3—10 кГц. Однако это
усложняет устройство в связи с
необходимостью применения преобразователей
частоты.
)
соблюдалось условие:
=
и
=
.
В
этом случае мост будет находиться в
равновесии
и при подаче напряжения ток в измерительной
диагонали АБ
отсутствует.
При подводе к наконечнику детали якорь
сместится из среднего
положения, равновесие моста нарушится,
и в обмотках датчика появятся токи I1
и I2
(рис. 11, б), а в диагонали ток I
= I1-I2
- фиксируемый прибором
ИП.
Благодаря высокой чувствительности и
линейности характеристику (рис.
11, б)
дифференциальные
индуктивные датчики получают все более
широкое
применение в контрольно-измерительных
приборах и устройствах. Большинство
из них работает на частоте источника
питания 50 Гц при стабилизированном
напряжении 10—30 В. При особо высоких
требованиях к чувствительности
и точности работы датчиков частоту
питающего напряжения
увеличивают до 3—10 кГц. Однако это
усложняет устройство в связи с
необходимостью применения преобразователей
частоты.


Рис.
19. Схема включе-
ния
обмоток дифферен-
и его характеристика (б).
Примеры конструкций дифференциальных индуктивных датчиков показаны на рис. 12.
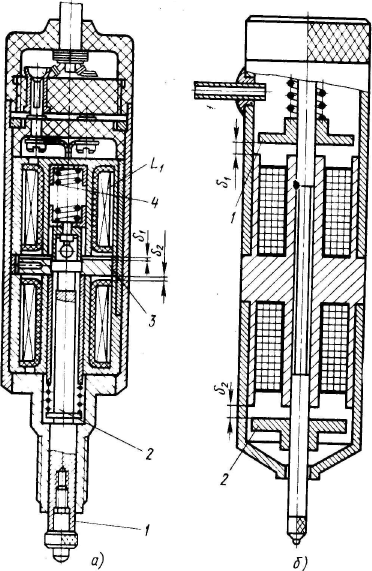
Рис. 12. Схема дифференциальных индуктивных датчиков
В конструкции с общим якорем (рис. 12, а) перемещение штока 1 при измерении вызывает смещение якоря 3 и изменение зазоров и . Измерительное усилие обеспечивается пружиной 4. Так как расстояние между якорем и магнитопроводами невелико, то предусмотрена возможность дополнительного перемещения штока снизу вверх (например, если на измерительную позицию попала деталь с размером, выходящим за пределы поля допуска). Шток связан с якорем не непосредственно, а через пружину 2, поэтому при ходе вверх после остановки якоря он может еще переместиться, сжимая пружину 2. В датчике с двумя якорями (рис. 12, б) неподвижный магнитопровод с обмотками размещен в средней части корпуса. При перемещении штока изменяются зазоры и между неподвижным магнитопроводом и якорями 1 и 2, вызывая изменение индуктивного сопротивления его обмоток.
Величина рабочего хода, определяющая максимально возможные пределы измерения, составляет у дифференциальных индуктивных датчиков ±0,01—0,5 мм.
Недостатками бесконтактного индуктивного метода измерения являются:
1) малая величина измерительного зазора (1,5+5) мм и предела измерения (1-3) мм;
2) зависимость погрешностей измерения от электрических свойств материала контролируемых деталей;
3) значительная нелинейность характеристики преобразователя датчика.
К достоинствам индуктивных датчиков относятся:
1) простота конструкции и долговечностью, так как эти датчики не имеют изнашивающихся деталей;
2) высокая чувствительность и точность контроля.