

Главный вектор и главный момент сил инерции
Система
сил инерции твёрдого тела можно заменить
одной силой, равной
и
приложенной в центре О, и парой с
моментом, равным
.
Главный вектор системы сил, как известно,
не зависит от центра приведения и может
быть вычислен заранее. Т.к. ![]() ,
то
,
то
![]() (2)
(2)
Следовательно, главный вектор сил инерции тела, совершающего любое движение, равен произведению массы тела на ускорение его центра масс и направлен противоположно этому ускорению.
Если ускорение разложить на касательное и нормальное, то вектор разложиться на составляющие
![]() ,
, ![]() .
.
Главный момент сил инерции найдём для некоторых частных случаев:
1.
Поступательное движение. В
этом случае тело никакого вращения
вокруг центра масс С не имеет.
Отсюда заключаем, что ![]() ,
и равенство (1) даёт
,
и равенство (1) даёт ![]() .
.
Следовательно, при поступательном движении силы инерции твёрдого тела приводят к одной равнодействующей, равной и проходящей через центр масс тела.
2. Плоскопараллельное движение. Пусть тело имеет плоскость симметрии и движется параллельно ей. Вследствие симметрии главный вектор и результирующая пара сил инерции, так же как и центр масс С тела, лежат в плоскости симметрии.
Тогда,
помещая центр приведения в точке С,
получим из равенства (1) ![]() .
С другой стороны
.
С другой стороны ![]() .
Отсюда заключаем, что
.
Отсюда заключаем, что
![]() (3)
(3)
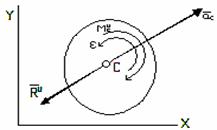
Таким
образом, в рассмотренном случае движение
системы сил инерции приводится к
результирующей силе, равной
[формула
(2)] и приложенной в центре масс С тела
(рис.32), и к лежащей в плоскости симметрии
тела паре, момент которой определяется
формулой (3). Знак минус в формуле
показывает, что направление
момента ![]() противоположно
направлению углового ускорения тела.
противоположно
направлению углового ускорения тела.
3. Вращение
вокруг оси, проходящей через центр масс
тела. Пусть
опять тело имеет плоскость симметрии,
а ось вращения СZперпендикулярна
к этой плоскости и проходит через центр
масс тела. Тогда данный случай будет
частным случаем предыдущего. Но при
этом ![]() , а
следовательно, и
, а
следовательно, и ![]() .
.
Таким образом, в рассмотренном случае система сил инерции приводится к данной паре, лежащей в плоскости, перпендикулярной к оси вращения тела, и имеющей момент
![]() .
.
При решение задач по формулам (1) и (3) вычисляются модули соответствующих величин, а направление их указывают на чертеже.