

13.Метод Гаусса исследования и решения систем линейных уравнений.
Ме́тод Га́усса[1] — классический метод решения системы линейных алгебраических уравнений (СЛАУ). Это метод последовательного исключения переменных, когда с помощью элементарных преобразований система уравнений приводится к равносильной системе ступенчатого (или треугольного) вида, из которого последовательно, начиная с последних (по номеру) переменных, находятся все остальные переменные[2].
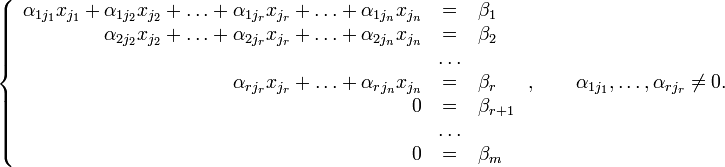
Пусть исходная система выглядит следующим образом

Матрица A называется основной матрицей системы, b — столбцом свободных членов.
Тогда согласно свойству элементарных преобразований над строками основную матрицу этой системы можно привести к ступенчатому виду(эти же преобразования нужно применять к столбцу свободных членов):
При этом будем
считать, что базисный
минор
(ненулевой минор
максимального порядка) основной матрицы
находится в верхнем левом углу, то есть
в него входят только коэффициенты при
переменных
![]() [3].
[3].
Тогда переменные называются главными переменными. Все остальные называются свободными.
Если хотя бы одно
число
![]() ,
где i > r, то рассматриваемая система
несовместна.
,
где i > r, то рассматриваемая система
несовместна.
Пусть
![]() для
любых i > r.
для
любых i > r.
Перенесём свободные
переменные за знаки равенств и поделим
каждое из уравнений системы на свой
коэффициент при самом левом
![]() (
(![]() ,
где
,
где
![]() —
номер строки):
—
номер строки):
 ,
где
,
где
![]()
Если свободным переменным системы (2) придавать все возможные значения и решать новую систему относительно главных неизвестных снизу вверх (то есть от нижнего уравнения к верхнему), то мы получим все решения этой СЛАУ. Так как эта система получена путём элементарных преобразований над исходной системой (1), то по теореме об эквивалентности при элементарных преобразованиях системы (1) и (2) эквивалентны, то есть множества их решений совпадают.
14.Системы однородных линейных уравнений. Условие единственности решения.
Однородные системы линейных уравнений
Однородная система линейных уравнений AX = 0 всегда совместна. Она имеет нетривиальные (ненулевые) решения, если r = rank A < n.
Для однородных систем базисные переменные (коэффициенты при которых образуют базисный минор) выражаются через свободные переменные соотношениями вида:
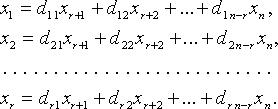
Тогда n - r линейно независимыми вектор-решениями будут:
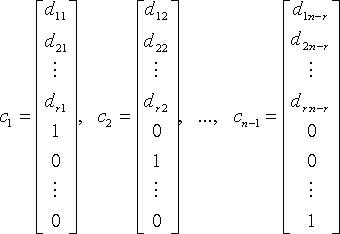
а любое другое
решение является их линейной комбинацией.
Вектор-решения
![]() образуют
нормированную фундаментальную систему.
образуют
нормированную фундаментальную систему.
В
линейном пространстве
![]() множество
решений однородной системы линейных
уравнений образует подпространство
размерности n - r;
-
базис этого подпространства.
множество
решений однородной системы линейных
уравнений образует подпространство
размерности n - r;
-
базис этого подпространства.
15.Линейные пространства:определение,примеры.
Определение линейного пространства
Пусть
V - непустое множество (его элементы
будем называть векторами и обозначать
![]() ...),
в котором установлены правила:
...),
в котором установлены правила:
1)
любым двум элементам
![]() соответствует
третий элемент
соответствует
третий элемент
![]() называемый
суммой элементов
называемый
суммой элементов
![]() (внутренняя
операция);
(внутренняя
операция);
2)
каждому
![]() и
каждому
и
каждому
![]() отвечает
определенный элемент
отвечает
определенный элемент
![]() (внешняя
операция).
(внешняя
операция).
Множество V называется действительным линейным (векторным) пространством, если выполняются аксиомы:
I.
![]()
II.
![]()
III.
![]() (нулевой
элемент, такой, что
(нулевой
элемент, такой, что
![]() ).
).
IV.
![]() (элемент,
противоположный элементу
(элемент,
противоположный элементу
![]() ),
такой, что
),
такой, что
![]()
V.
![]()
VI.
![]()
VII.
![]()
VIII.
![]()