

Способы регулирования скорости мпт
1.Якорное регулирование частоты вращения - для ДПТ независимого возбуждения. Необходим автономный источник питания с регулируемым напряжением.
Изменение напряжения на якоре.(рис.12)
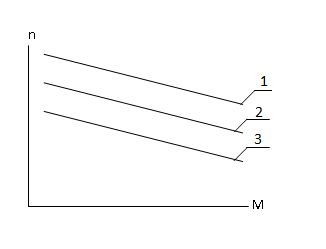
1 - ![]()
2 - ![]()
3 - ![]()
рис.12
2.Реостатное регулирование
Изменение
сопротивления ![]() в цепи якоря.
в цепи якоря.

 1
1![]() естественная МХ
естественная МХ
искусственные
МХ![]()
3 ![]()
4 ![]()
рис.13
3. Полюсное
Изменение потока возбуждения производится включением регулировочного реостата в цепь обмотки возбуждения. Механическая характеристика –кривая гиперболического типа.
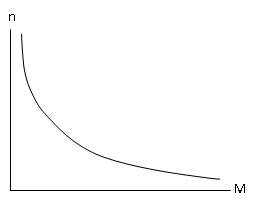
Отличается от
гиперболы ![]()
рис.14
Полюсной и реостатный способы при постоянном напряжении сети.
![]()
![]()
рис.14
М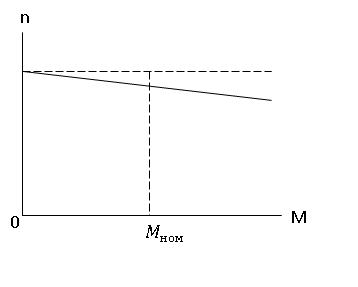 еханическая
характеристика
еханическая
характеристика ![]() ,
рис.15
,
рис.15
![]()
рис.15
Скорость изменяется
в пределах
![]()
Характеристика жесткая.
Двигатели параллельного и независимого возбуждения
![]() .
После пуска двигателя пусковой реостат
выводится полностью и к якорю подводиться
напряжение сети.
.
После пуска двигателя пусковой реостат
выводится полностью и к якорю подводиться
напряжение сети.
1.Рабочие характеристики
при
![]() ;
изменяется, как и
;
изменяется, как и
![]() и
и
![]()
![]()
-подводимая мощность;
2.Внешняя характеристика

3. Механическая характеристика
![]() ;естественная
;естественная
![]()
Изменяется в
пределах
![]() .
Характеристика жесткая. Для регулирования
скорости применяются все 3 способа. Для
ДПТ независимого возбуждения характеристики
аналогичны.
.
Характеристика жесткая. Для регулирования
скорости применяются все 3 способа. Для
ДПТ независимого возбуждения характеристики
аналогичны.
Двигатель последовательного возбуждения
![]() Режим ХХ невозможен,
т.к. при
близком к нулю
и
Режим ХХ невозможен,
т.к. при
близком к нулю
и
![]() ,
следовательно, скорость n
увеличивается в несколько раз по
сравнению с
,
следовательно, скорость n
увеличивается в несколько раз по
сравнению с
![]()
![]() двигатель
идет вразнос, поэтому же двигатель
пускают при нагрузке не менее 25% от
номинальной: при отсутствии нагрузки
двигатель снабжается защитой для
отключения от сети.
двигатель
идет вразнос, поэтому же двигатель
пускают при нагрузке не менее 25% от
номинальной: при отсутствии нагрузки
двигатель снабжается защитой для
отключения от сети.
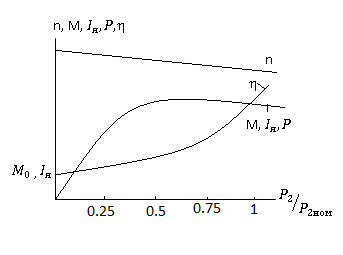
Рабочие характеристики
З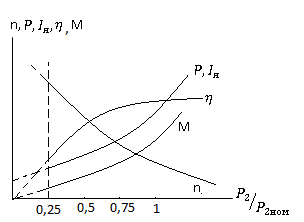 ависимость
ависимость
![]() -типична
для электрических машин – мало изменяется
в пределах
-типична
для электрических машин – мало изменяется
в пределах
![]()
![]()
рис.16
Потребляемая
из сети мощность (близка к прямой)
![]() одинаковый вид
одинаковый вид
![]()
2. Механическая характеристика
1- шунтировании О.В.
2-естественная м.х.
3-шунтировании обмотки якоря
Регулирование скорости
![]()
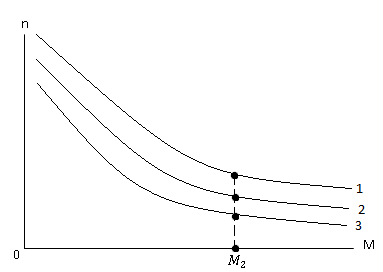
рис.17
С увеличением нагрузки скорость падает. Данные двигатели широко применяются как тяговый двигатель на транспорте и в крановых установках.
Способы регулирования скорости
1.Реостатное и безреостатное
Изменение
напряжения на зажимах двигателя с
помощью реостата с сопротивлением
![]() ,
включенного в цепь якоря.
,
включенного в цепь якоря.
2. Изменение потока возбуждения в цепи
Изменение тока в цепи возбуждения с помощью регулировочного реостата, в цепь питания обмотки возбуждения.
3.Изменение потока полюсов с помощью шунтирования ОВ, при этом скорость увеличивается, при шунтировании обмотки якоря скорость уменьшается по сравнению с исходной (рис.17)
Двигатели последовательного возбуждения имеют большой пусковой момент и не создают больших пусковых токов при пуске как двигатели параллельного возбуждения.