

2. Модели состояния яркости изображений фона и объекта слежения
Для огромного количества возможных объектов очень трудно задать общее описание яркости в каждом элементе. Это достаточно сложно, поэтому мы будем использовать поточечное (поэлементное) описание для точек фона и объекта. Предполагается, что точки объекта являются связанными. Одним из простых способов описания является задание яркости каждой точки по отдельности.
Введем обозначения:
Gn – множество точек изображения фона размерностью N×N элементов;
G(n) – вектор, соответствующий этому изображению;
g(i, j, n) – яркости в точках (i, j) в n-м кадре.
G(n)
= G(n–
1)
(5.6)
или, что то же самое,
![]()
Если считать начальное состояние G(0) случайным гауссовским вектором, то необходимо задать математическое ожидание mG и ковариационную матрицу KG этого вектора. Вектор G содержит N2 элементов, а матрица KG будет содержать N4 элементов.
Считается, что матрица KG является диагональной с дисперсиями Dg на главной диагонали.
Модель, учитывающая возможные изменения яркости (температуры) во времени:
g(i, j, n) = g(i, j, n – 1) + ω(i, j, n–1), (5.7)
где
ω(i,j,n–1)
– N(0,Dω)
– процесс, некоррелированный во времени
и протекающий независимо в каждой точке
изображения![]()
Изображение
объекта представляет собой связное
множество точек с соответствующими
яркостями (две точки объекта считаются
связанными, если они отстоят друг от
друга не более чем на
![]() ,
где Δ – интервал пространственной
дискретизации).
,
где Δ – интервал пространственной
дискретизации).
С течением времени яркость в различных точках изображения может изменяться каким-либо образом (может меняться температура, освещенность), возникает вопрос: как можно математически описать возможную изменчивость, если она носит случайный характер. Это можно сделать с помощью модели (5.7).
Такой процесс носит название случайного марковского процесса с независимыми приращениями (ω). Условно это можно нарисовать.
Возьмем точку на оси g(i, j). Далее яркость меняется и в процессе носит нестационарный характер (т.е. яркость то увеличивается, то уменьшается). В каждой точке в результате задания такой модели мы имеем марковский процесс, который протекает независимо в каждой точке изображения, что формирует неоднородное по пространству изображение.
Если дисперсия Dω=0, то мы получим постоянную (тоже, что и в начале). Если дисперсия мала, то мы будем иметь медленно меняющуюся по времени, если велика – то интенсивнее.
По отношению к объекту будем действовать также, как и к фону.
Определяем следующие яркостные модели для объекта:
1. Объект не движется, и яркости составляющих его точек постоянны во времени:
![]()
где h(i, j, n) – яркость объекта в точке (i, j) в n-м кадре.
2. Объект не движется, но яркости составляющих его точек могут изменяться во времени:
h(i, j, n) = h(i, j, n – 1) + η(i, j, n – 1), (5.9)
где η(i, j, n) – N(0, Dη) – процесс, некоррелированный во времени и протекающий независимо в каждой точке изображения.
Начальное значение h(i,j,0) – гауссовская случайная величина с известными средним и дисперсией.
3. Объект движется, но яркости составляющих его точек неизменны:
![]()
Где
![]() – смещение объекта вдоль осей координат
за кадр.
– смещение объекта вдоль осей координат
за кадр.
Для описания изображения протяженного объекта оказывается удобным использовать наряду с введенной дискретной решеткой (xi,yj) вторую дискретную решетку (xν,yμ), начало которой совпадает с точкой, ближайшей к центру непрерывного изображения объекта (рис. 5.2).
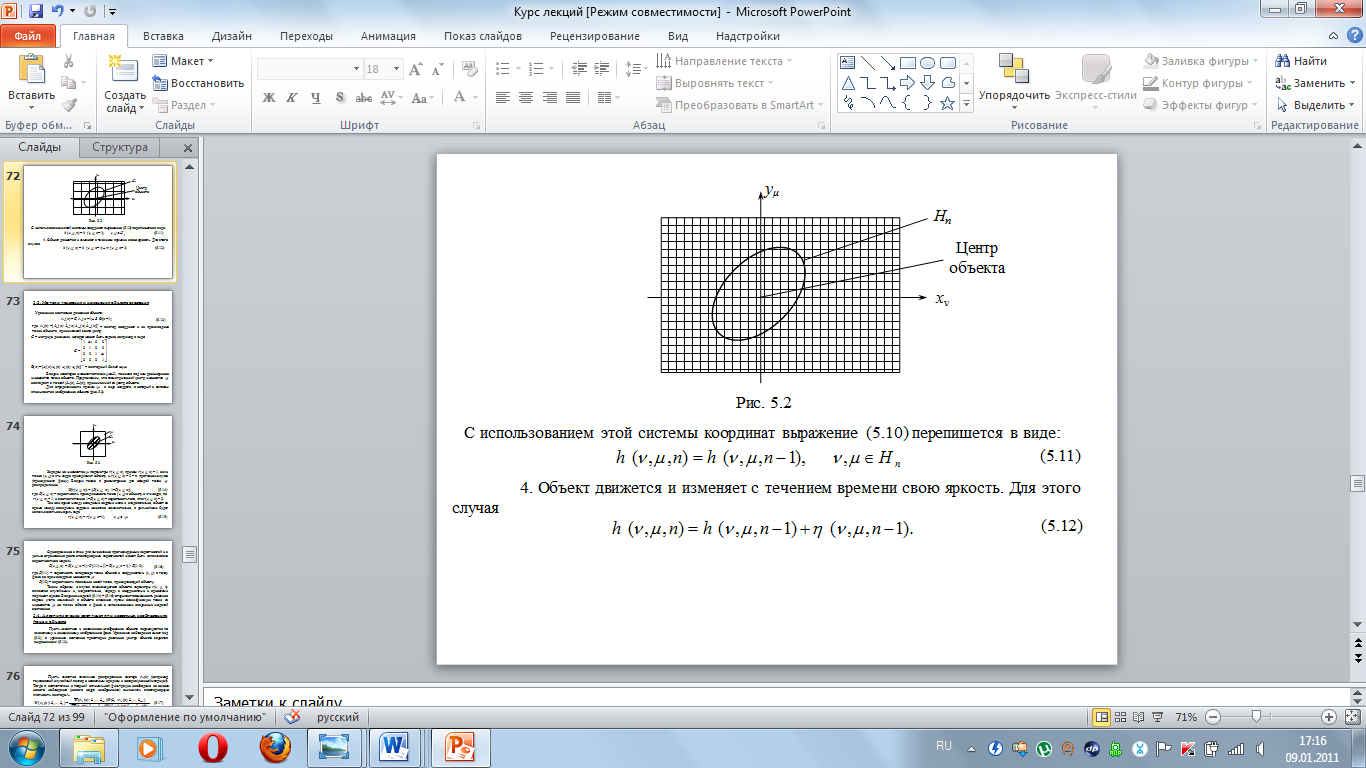
С использованием этой системы координат выражение (5.10) перепишется в виде:
![]()
4. Объект движется и изменяет с течением времени свою яркость. Для этого случая
![]()
Билет 1. Инверсная фильтрация. Винеровская фильтрация.
2. Модель движения и изменения объекта слежения.