

2. Алгоритм оценки координат при известном изображении фона и объекта. Критерий максимума апостериорной плотности
Задачу определения координат и задачу прогнозирования положений будем решить отдельно друг от друга.
Спроектируем
оптимальный измеритель координат центра
объекта
![]() на
основе прогноза положения. Пусть
априорная плотность λh(n)
является гауссовой со средним
на
основе прогноза положения. Пусть
априорная плотность λh(n)
является гауссовой со средним
![]() и ковариационной матрицей Kh(n).
Используя принцип максимума апостериорной
плотности и выполняя логарифмирование,
приходим к необходимости отыскания
глобального минимума выражения
и ковариационной матрицей Kh(n).
Используя принцип максимума апостериорной
плотности и выполняя логарифмирование,
приходим к необходимости отыскания
глобального минимума выражения
![]()
где
S(i,
j,
n)
является нелинейной функцией от![]() .
.
1-я составляющая – это показатель гауссовой плотности для прогнозируемого распределения, а 2-ое слагаемое – показатель гауссовой плотности для условной плотности. 1-я составляющая этого критерия выступает по существу в роли штрафной функции при оптимизации 2й части критерия.
Таким образом, задача нахождения λh(n) сводится к поиску глобального минимума критерия J(возможно i(n))в пространстве параметров [λhx(n) λhy(n)]. Процедура поиска заключается в перемещении изображения некоторого изображения объекта (известно) по изображению фона (также известно) и вычислении для каждого положения объекта значения критерия.
Всегда
на основе прогноза и измерения нам
желательно получить оценку
![]() .
.
Будем
считать, что измерение
![]() сопровождается белым шумом
сопровождается белым шумом
![]() с гауссовским распределением
с гауссовским распределением
![]() ,
некоррелированным с
:
,
некоррелированным с
:
![]()
![]()
Уравнение (5.23) – уравнение наблюдения (измерения), линейное. (5.13) – уравнение состояния движения, тоже линейное. Мы хотим на основе получаемых измерений сформулировать оценку вектора Λh, содержащую координаты и скорость. Алгоритм оптимальной оценки вектора Λh представляет собой фильтр Калмана. Фильтр Калмана – тот же наблюдатель состояния, но при наличии помех:
![]()
Фильтр Калмана устроен так, что если бы в модели (5.13) отсутствовал шум, то коэффициент K(n)→0 и тогда в качестве оценки всегда был бы прогноз.
Если при формировании измерений ограничиться критерием максимального правдоподобия, то первая составляющая (5.22) исчезнет.
Величина (5.24) называется невязка (разница между прогнозом и измерением).
Фильтр Калмана – это траекторный фильтр, он сглаживает ошибки и дает лучшее значение координат и прогноз на следующий шаг.
Билет 1. Методы сегментации. Дискриминантный критерий.
2. Алгоритм оценки координат при известном изображении фона и объекта. Критерий максимального правдоподобия.
1. Методы сегментации. Дискриминантный критерий
Сегментация изображения – это разбиение изображения на сегменты (некоторые области или объекты), то есть на совокупность областей. Сегментация является одним из важнейших этапов в анализе изображения, т.е. чтобы обнаружить объект, его нужно выделить из общего изображения.
Существует большое количество методов сегментации, которые основываются на различных принципах: различные методы пороговой сегментации, на основе которых можно выделить фрагменты изображения, различающихся по яркости, по цвету.
Задача сегментации может решаться на основе выделения каких-либо признаков, характерных для того или иного участка изображения. Есть методы сегментации, основанные на движении. Их задача – выделить движущийся объект.
Существует множество алгоритмов, реализующих те или иные подходы. Универсального метода не существует. Часто хорошего решения не получается. Нужно смотреть конкретное изображение.
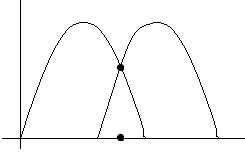
Задача сегментации – одна из важнейших задач. Она состоит выполнении классификации точек (выделении). Самый простой метод основан на выборе порогового значения яркости, все что меньше порога – фон, то что больше (другой класс точек) – объект. Если горбов несколько, то берем в межмодовых впадинах.
Такие достаточно простые ситуации встречаются не всегда:
1) Межмодовые впадины могут не обладать таким ярким минимумом, т.е. непонятно, где ставить порог.
2) Межмодовые впадины могут быть пологими .т.е. снова неясно, где располагать порог.
![]()
3) Рспределения могут перекрываться – тогда неизбежны ошибки.
Ошибки 1-ого и 2-ого рода, их еще называют «ложная тревога» и «пропуск цели». Это одна из важных проблем сегментации, когда мы точки из одного класса присваиваем другому классу, мы существенно искажаем форму.
Дискриминантный критерий
Будем рассматривать ситуацию, когда имеется 2 области (объект и фон), различающихся по яркости, и задача заключается в том, чтобы наилучшим образом разделить изображение на 2 класса.
Располагая
гистограммой яркостей
![]() и
порогом t,
разделим изображение l(i,j)
на два класса:
и
порогом t,
разделим изображение l(i,j)
на два класса:
0 – фон, включающий точки (i,j), для которых l(i,j) t;
1 – объект, включающий точки (i,j), для которых l(i,j) t.
Оценим вероятность принадлежности наугад взятой точки объекту - 1(t) или фону ‑ 0(t):
![]()
![]()
Оценка
распределения вероятностей яркостей
для фона найдется как
![]() для
объекта – как
для
объекта – как
![]()
Оценки средних уровней яркости для фона и объекта найдутся соответственно:
![]()
![]()
Средний уровень яркости исходного изображения составит
![]()
Очевидно, что для любого t справедливо
![]()
Оценки дисперсий яркостей фона и объекта задаются выражениями
![]()
![]()
Внутриклассовая дисперсия определяется как
![]()
межклассовая –
![]()
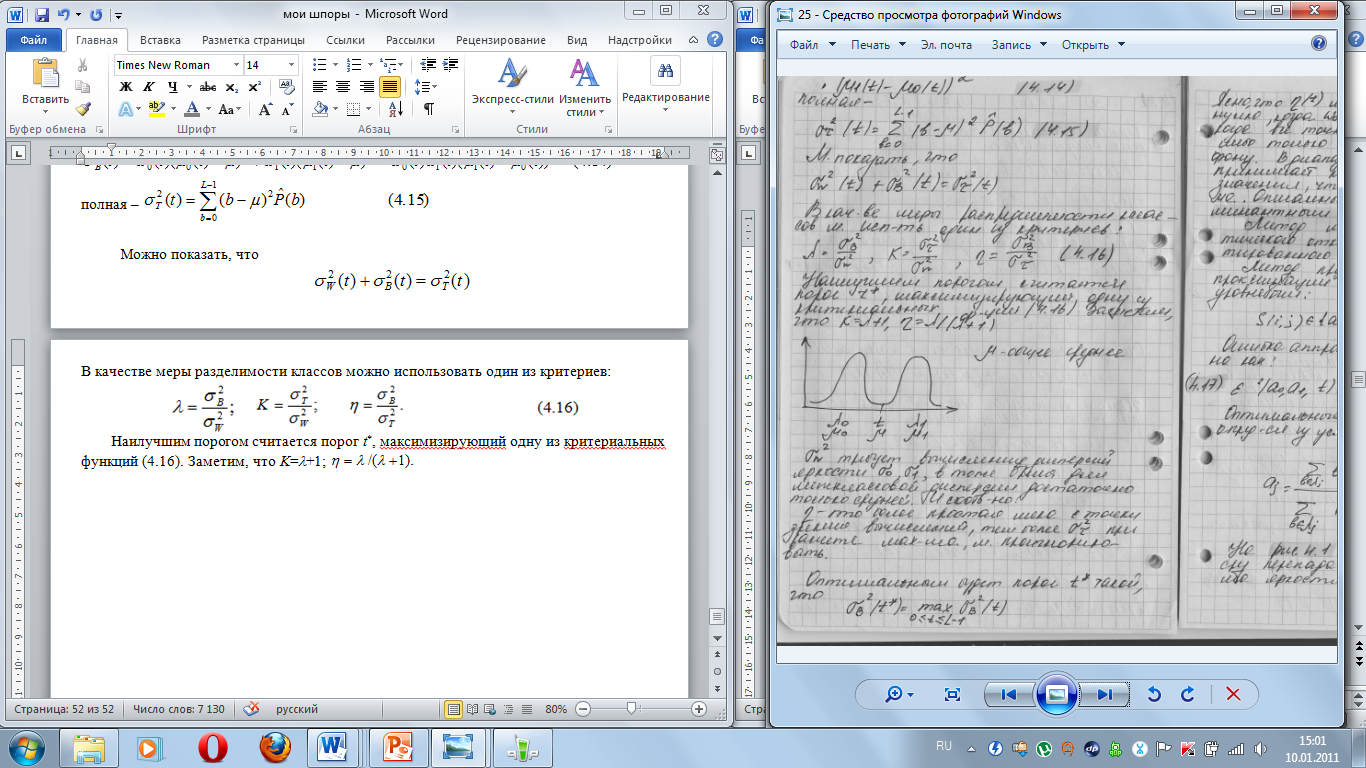
полная
–![]()
Можно показать, что
![]()
В качестве меры разделимости классов можно использовать один из критериев:
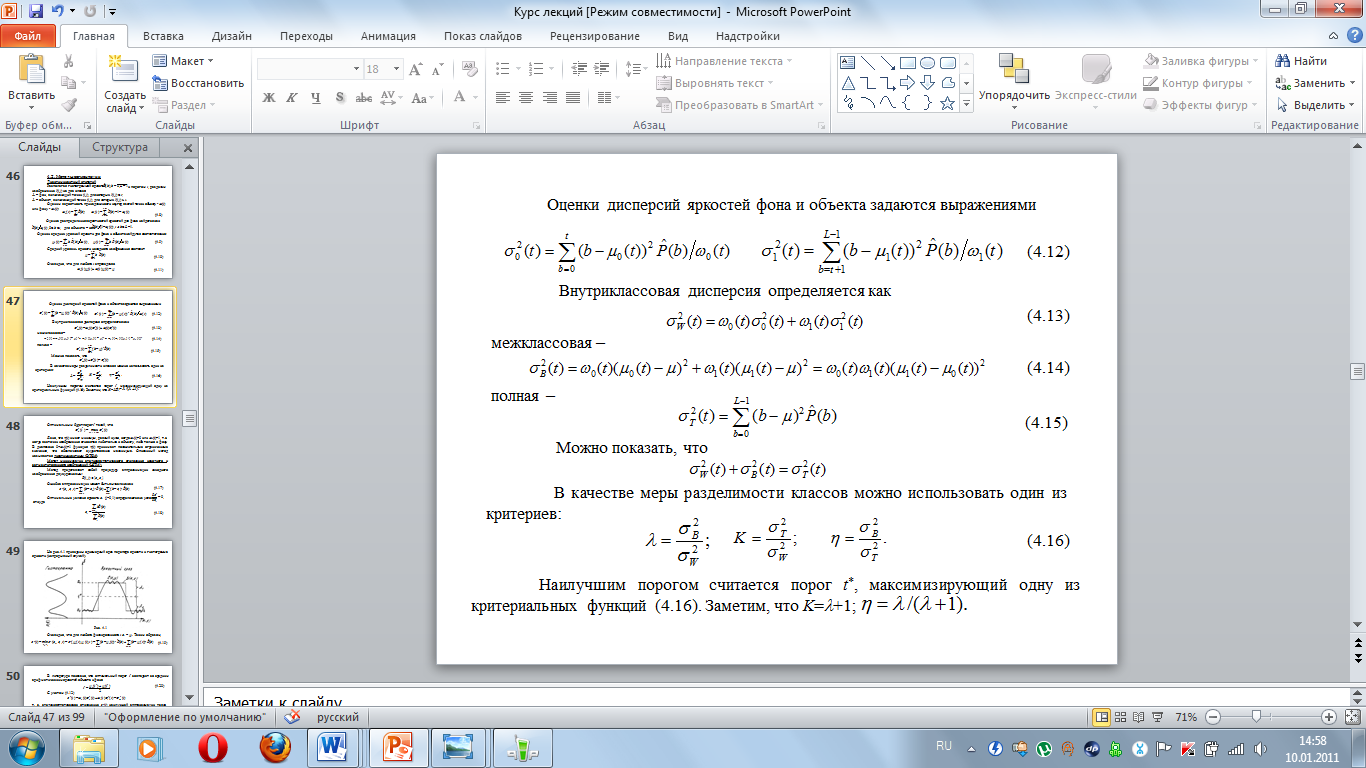
Наилучшим
порогом считается порог t*,
максимизирующий одну из критериальных
функций (4.16). Заметим, что K=+1;![]()
![]() требует
вычислений дисперсий яркости
требует
вычислений дисперсий яркости
![]() ,
в тоже время для межклассовой дисперсии
достаточно только средней. И соответственно:
,
в тоже время для межклассовой дисперсии
достаточно только средней. И соответственно:
![]() - это более простая мера с точки зрения
вычислений, тем более
- это более простая мера с точки зрения
вычислений, тем более
![]() при
расчете максимума, можно прогнозировать.
при
расчете максимума, можно прогнозировать.
Оптимальным будет порог t* такой, что
![]()
Ясно, что (t) имеет минимум, равный нулю, когда 0(t)=0 или 0(t)=1, т.е. когда все точки изображения относятся либо только к объекту, либо только к фону. В диапазоне 0<0(t)<1 функция (t) принимает положительные ограниченные значения, что обеспечивает существование максимума. Описанный метод называется дискриминантным (DTSM).