

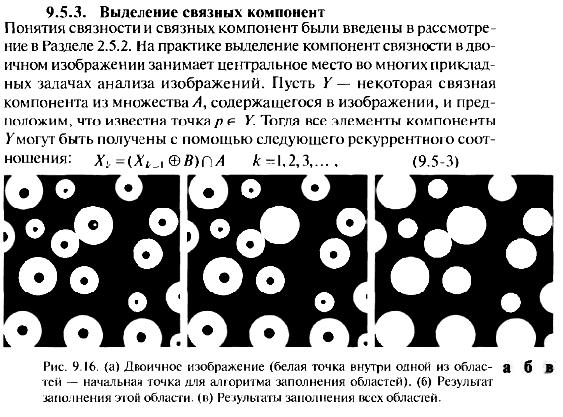
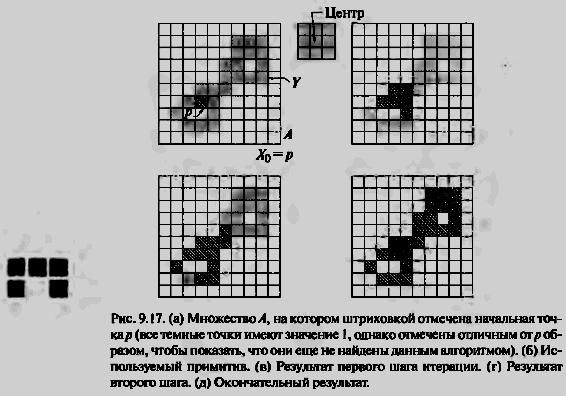
2. Морфологическая операция выделения связанных компонентов

Билет 1. Описание дискретных изображений.
2. Корреляционные методы измерения координат объектов.
1. Описание дискретных изображений
Кадр изображения обычно представляется в виде матрицы F размерностью N1xN2, с элементами F(n1,n2). Однако часто удобно использовать векторное представление изображения. Введем для этого вспомогательный вектор Vn размером N2х1 и матрицы Nn размером N1N2xN1, определяемые следующим образом:
![]()
Пример.

В этом случае матрица F будет представлена в векторной форме с помощью операции упорядочения
![]()
Обратная операция преобразования вектора f в матрицу F описывается соотношением
![]()
При использовании статистического описания дискретных изображений начальные моменты определяются следующим образом:
![]()
т.е. среднее значение матрицы есть матрица, содержащая средние значения элементов.
Вектор
![]() выделяет n-столбец
матрице
выделяет n-столбец
матрице
![]() ,
а матрица
,
а матрица
![]() помещает этот столбец на место, отведенное
для n-го
участка вектора f.
Таким образом, вектор f
содержит все элементы матрицы
,
последовательно считанные по столбцам.
помещает этот столбец на место, отведенное
для n-го
участка вектора f.
Таким образом, вектор f
содержит все элементы матрицы
,
последовательно считанные по столбцам.
Если матрица разверткой по столбцам преобразована в вектор, то среднее значение этого вектора
![]()
Достоинством такого представления является возможность непосредственного использования методов, разработанных для обработки одномерных сигналов.
Корреляция двух элементов изображения с индексами (n1, n2) и (n3, n4) определяется как
![]()
Ковариация двух элементов изображения есть
![]()
Дисперсия
элемента изображения
![]()
Если матрица изображения преобразована в вектор f, то корреляционную матрицу этого вектора можно выразить через корреляции элементов матрицы F

или
![]()
Выражение![]() =
Rm,n
представляет собой корреляционную
матрицу m-го
и n-го
столбцов матрицы F
и имеет размер N1xN1.
Таким образом, Rf
можно представить в виде блочной матрицы
=
Rm,n
представляет собой корреляционную
матрицу m-го
и n-го
столбцов матрицы F
и имеет размер N1xN1.
Таким образом, Rf
можно представить в виде блочной матрицы
Ковариационную матрицу вектора f можно получить на основе его корреляционной матрицы и вектора средних значений с помощью соотношения
![]()
Матрица дисперсий VF массива чисел F(n1,n2) по определению является матрицей, элементы которой равны дисперсиям соответствующих элементов массива. Элементы матрицы VF можно непосредственно выделить из блоков матрицы Kf
![]()
Дискретное изображение, представленное вектором, можно полностью описать с помощью совместной плотности вероятности его элементов
![]()
где Q = N1N2 определяет порядок совместной плотности. В случае статистической независимости элементов изображения совместная плотность равна произведению одномерных безусловных плотностей
![]()
Наиболее распространенным видом совместной плотности вероятности является гауссова плотность
![]()
где Kf - определитель матрицы Kf.
2. Корреляционные методы измерения координат объектов
Для решения задач обнаружения, измерения координат, распознания объектов используются корреляционные методы, основанные на использовании информации о некотором эталонном изображении объекта.
Пусть имеется дискретное эталонное изображение объекта H, представляющее собой множество связанных элементов h(i,j) с некоторым условным центром, расположенным в начале координат. Наблюдаемое в некотором кадре изображение L описывается моделью вида
![]()
где Zh – оператор, воздействующий на изображение объекта (оператор искажений);
ξ (i,j) – нормальный белый шум.
Часто Zhможет вызыватьповорот изображения или изменять яркость объекта, изменять масштаб. Задача состоит в том, чтобы решать задачу измерения координат объекта, не смотря на эти изменения, искажения.
Мы ограничимся моделью, включающей смещение объекта вдоль осей координат. Тогда выражение (4.28) может быть представлено в виде
![]()
где α, β – параметры, характеризующие смещение центра объекта относительно начала координат. В (4.29) считается, что фон имеет нулевую яркость, т.е. имеется объект и шум на изображении.
Пусть
нам известна![]() ,
но мы не знаем, на каком месте находимся.
С использованием статистических решений.
Показано, что в этом случае оптимальным
измерением координат объекта является
вычисление взаимной корреляционной
функции наблюдаемого и эталонного
изображения объекта.
,
но мы не знаем, на каком месте находимся.
С использованием статистических решений.
Показано, что в этом случае оптимальным
измерением координат объекта является
вычисление взаимной корреляционной
функции наблюдаемого и эталонного
изображения объекта.
Пространственная взаимная корреляционная функция наблюдаемого изображения и эталонного изображения объекта:
![]()
Мы должны определить значения α*, β*, при которых достигается глобальный максимум выражения (4.30) . Эти значения будут определять положение центра объекта.
Если представить, что фон ненулевой, то мы можем получить не тот результат, а грубые ошибки, т.к., например, какая-то область изображения окажется яркой и мы умножим на большее значение яркости и получим значение, большее критерия. Чтобы ослабить этот эффект, используют нормированнуюую функцию вида (4.31).
Значения α*, β*, при которых достигается глобальный максимум выражения (4.30), принимаются в качестве величин, характеризующих смещение объекта вдоль осей координат.
Нормированная функция:

Еще один подход связан с разностными критериальными функциями, где уже нужно производить поиск глобального минимума.
Критериальные разностные функции:
![]()
![]()
Здесь находятся такие изображения, которые менее всего отличаются от эталонного. Влияние неравномерного фона уже меньше. Для абсолютно точного решения необходимо производить перебор всех α, β, а это требует огромного количества вычислений.
Пусть эталонный объект содержит 100*100 элементов, т.е. 10000 пикселей. Изображение, на котором мы хотим вести поиск 1000*1000 элементов, т.е. 1000000 возможных позиций, т.е. 10000 умножений и сложений. Получается, сто потребуется совершить не меньше 10 миллиардов операций в секунду. Поэтому и было разработано так много подходов для решения этих задач.
Билет 1. Изменение контраста и виды изменения гистограмм.
2. Метод последовательного определения сходства изображения