

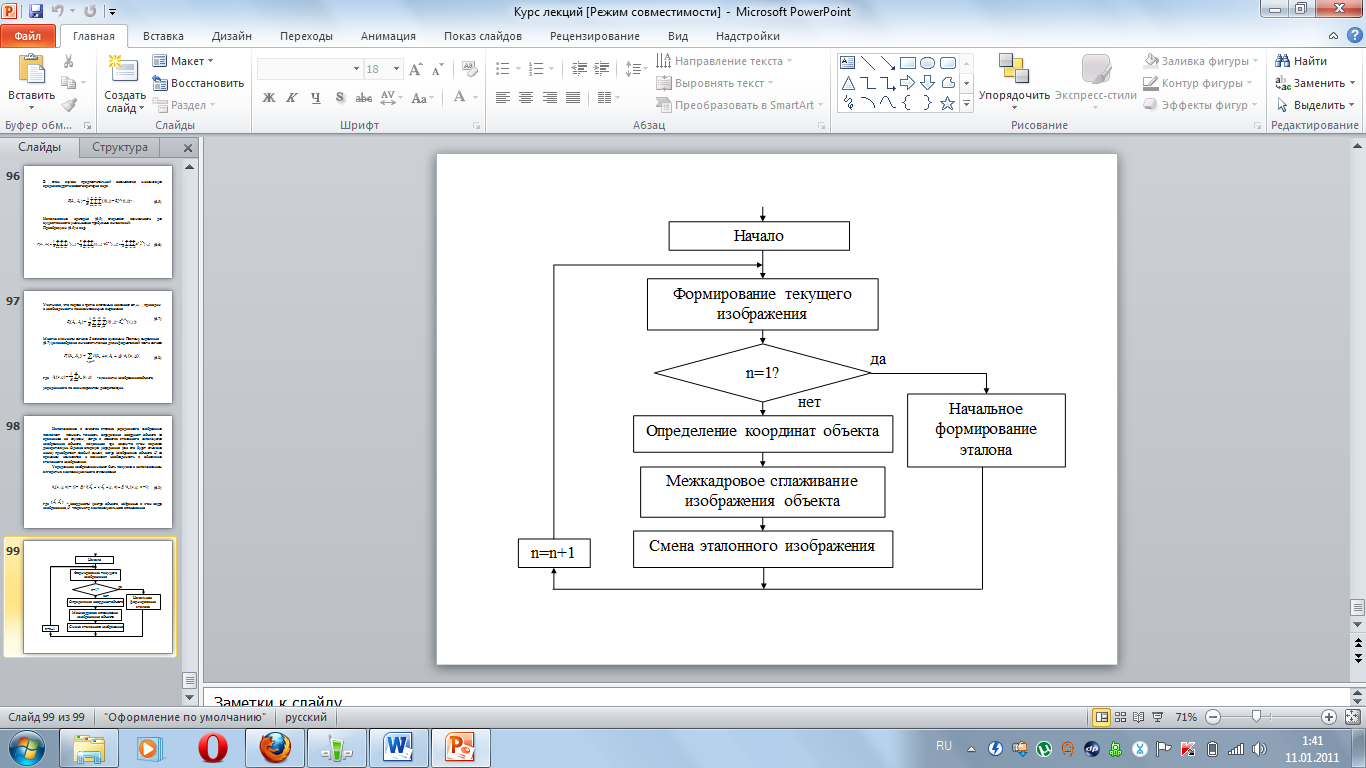
2.Алгоритм измерения координат с межкадровым усреднением текущего изображения объекта
В тех случаях, когда изображение объекта может изменяться с течением времени (изменение яркости, размеров, ракурса) требуется внесение изменений в текущее эталонное изображение объекта. В противном случае эталонное изображение (модель) перестает соответствовать текущему изображению объекта. Известно, что покадровая смена эталонного изображения ведет к накоплению ошибки измерения и как следствие к срыву слежения. При этом на точность измерения координат оказывают существенное влияние эффекты пространственной дискретизации изображений. Поэтому весьма желательно уменьшить их влияние на точность измерения.
Р![]()
![]()
![]() ассмотрим
вначале, каким образом можно уменьшить
влияние пространственной дискретизации,
полагая фон нулевым, а эталонное
изображение объекта известным. Пусть
в n-ом
кадре имеется изображение L
, представляющее собой, например,
квадратную матрицу с элементами
ассмотрим
вначале, каким образом можно уменьшить
влияние пространственной дискретизации,
полагая фон нулевым, а эталонное
изображение объекта известным. Пусть
в n-ом
кадре имеется изображение L
, представляющее собой, например,
квадратную матрицу с элементами
И ндекс n для упрощения написания пока опустим. Будем считать, что это изображение представляет собой аддитивную смесь полезного сигнала S и шума. Информативная часть сигнала S, сигнал H, представляет собой квадратную матрицу с элементами. , М<N. Другие элементы сигнала S считаются равными нулю. Сигнал H представляет собой дискретное изображение объекта. В дальнейшем предполагается, что может быть K вариантов дискретизации объекта, получающихся смещением непрерывного изображения объекта относительно узлов дискретизации на величину не более половины шага дискретизации вдоль координатных осей. Под измеренными координатами центра сигнала H будем понимать точку дискретного изображения, в которой будет достигаться наилучшее совмещение текущего и эталонного дискретных изображений объекта. Центр сигнала H может быть расположен в любой точке сигнала S, но таким образом, чтобы все элементы сигнала H принадлежали бы сигналу S, как это показано на рис.6.1. Отметим, что вначале, точка, принимаемая за центр, считается заданной.
О
![]() бозначим
через элементы
изображения ,
полученные в результате m-го
варианта дискретизации непрерывного
изображения объекта, а через
сигнал S
, содержащий в себе сигнал Hm
таким образом, что координаты центра
сигнала Hm
равны в системе дискретных
координат, связанных с центром изображения
L.
Тогда можно записать, что наблюдаемое
изображение L
представляет собой
бозначим
через элементы
изображения ,
полученные в результате m-го
варианта дискретизации непрерывного
изображения объекта, а через
сигнал S
, содержащий в себе сигнал Hm
таким образом, что координаты центра
сигнала Hm
равны в системе дискретных
координат, связанных с центром изображения
L.
Тогда можно записать, что наблюдаемое
изображение L
представляет собой
( 6.1)
6.1)
где M и N являются четными величинами.
![]() Рис.6.1.
Изображения L,
S,
H
Рис.6.1.
Изображения L,
S,
H
М![]() ожно
считать при этом, что сигналы L,
, представлены в виде векторов,
элементы которых упорядочены вполне
определенным образом.
ожно
считать при этом, что сигналы L,
, представлены в виде векторов,
элементы которых упорядочены вполне
определенным образом.
![]() Обозначим
априорную вероятность наличия сигнала
как
Обозначим
априорную вероятность наличия сигнала
как
Т огда
апостериорная вероятность наличия
сигнала в наблюдаемой реализации L
может быть вычислена с помощью формулы
Байеса
огда
апостериорная вероятность наличия
сигнала в наблюдаемой реализации L
может быть вычислена с помощью формулы
Байеса
(6.2)
![]()
Где - функция правдоподобия выборки.
А![]()
 постериорная
вероятность наличия сигнала с центром
в точке может быть вычислена
как
постериорная
вероятность наличия сигнала с центром
в точке может быть вычислена
как
(6.3)
П![]() усть
все варианты дискретизации объекта и
расположения его центра равновероятны.
Полагая полезный сигнал и помеху
статистически независимыми, и считая,
что все компоненты шума являются
независимыми нормальными случайными
величинами с нулевыми средними и
дисперсиями ,будем искать оценки
координат путем поиска максимума
выражения
усть
все варианты дискретизации объекта и
расположения его центра равновероятны.
Полагая полезный сигнал и помеху
статистически независимыми, и считая,
что все компоненты шума являются
независимыми нормальными случайными
величинами с нулевыми средними и
дисперсиями ,будем искать оценки
координат путем поиска максимума
выражения

(6.4)
![]()
где - элементы сигнала .
Реализация алгоритма оценки, в соответствии с (6.4), в реальном масштабе времени может оказаться затруднительной, в связи с необходимостью вычисления экспонент и использованием многих эталонов.
В этом случае предпочтительней оказывается минимизация среднеквадратического критерия вида

(6.5)
Использование критерия (6.5) открывает возможности для существенного уменьшения требуемых вычислений.
Преобразуем (6.5) к виду

(6.6)
![]()
Учитывая, что первое и третье слагаемые не зависят от , приходим к необходимости поиска максимума выражения

(6.7)
Многие элементы сигнала S являются нулевыми. Поэтому выражение (6.7) целесообразно вычислять только для информативной части сигнала

(6.8)

где - элементы изображения объекта, усредненного по
всем вариантам дискретизации.
Использование в качестве эталона усредненного изображения позволяет повысить точность определения координат объекта по сравнению со случаем, когда в качестве эталонного используется изображение объекта, полученное при каком-то m-ом варианте дискретизации. Однако операция усреднения (как это будет отмечено ниже) приобретает особый смысл, когда изображение объекта H со временем изменяется и возникает необходимость в обновлении эталонного изображения.
Усредненное изображение может быть получено с использованием алгоритма экспоненциального сглаживания
![]()
(6.9)
![]()
г![]() де
- координаты центра объекта,
найденные в n-ом
кадре изображения, -параметр
экспоненциального сглаживания.
де
- координаты центра объекта,
найденные в n-ом
кадре изображения, -параметр
экспоненциального сглаживания.
18 Билет 1. Морфологическая обработка. Базовые понятия теории множеств
2. Двумерное преобразование Фурье и его свойства