

10.2. Основные характеристики и параметры системы ару
1. Основной характеристикой является амплитудная характеристика линейного тракта приемника.

 и
и
 –
определяют динамический диапазон ПРМ.
–
определяют динамический диапазон ПРМ.
С применением системы АРУ динамический диапазон α на линейном участке существенно расширяется, т.е. ПРМ не перегружается.

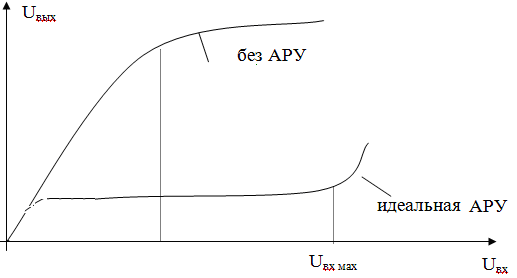
Для идеальной АРУ значение Uвых. должно приближаться к постоянному значению.
Чтобы АРУ не реагировало на шумы ПРМ, применяют задержанные системы АРУ.

В этой схеме детектор АРУ открывается только, когда:
В этом случае амплитудная характеристика ПРМ с задержанной системой АРУ выглядит следующим образом:

Преимущество АРУ с задержкой в том, что она не подвержена воздействию помех или слабых сигналов. При этом, в зависимости от напряжения задержки U3 можно регулировать быстродействие системы АРУ - чем больше U3, тем больше быстродействие.
10.3. Элементы системы ару
Любая система АРУ включает в себя:
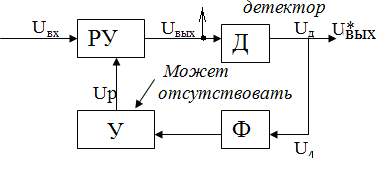
Детектор АРУ – ничем не отличается от обычных диодных детекторов, которые используются в основном тракте ПРМ.
Поэтому часто детектор АРУ совмещают с детектором ПРМ.
Фильтр АРУ – обычно строится на базе RC - цепей.
Наиболее широко применяется однозвенный RC – фильтр:

Чтобы правильно выбрать параметры фильтра необходимо выполнить следующие условия:
ω в > ωmax,
где: ωmax – максимальная частота закона изменения амплитуды
входного сигнала,
ω в – верхняя граничная частота фильтра.
ω в << Wmin, где Wmin - минимальная частота спектра полезного модулированного сигнала;
На практике применяются также двухзвенные RC –фильтры:

Такие фильтры применяются для повышения быстродействия системы АРУ.
Подбирая параметры фильтров, можно сделать так, чтобы сигнал проходил в фазе. Но эта структура фильтров приводит к меньшей устойчивости системы АРУ (в силу наличия в обратной связи двух интегрирующих звеньев).
Еще одна разновидность фильтра АРУ- пропорционально - интегрирующий фильтр:

Здесь меньший фазовый сдвиг на верхних частотах, т.е. система по сравнению с первой схемой более устойчива.
Регулируемый усилитель(РУ)
1. Режимный РУ.
На затвор транзистора (см. схему) подается регулирующее напряжение Up.
Регулируя напряжение U3И меняем крутизну стоко-затворной характеристики транзистора, а следовательно меняем его коэффициент усиления.

Глубина регулировки здесь:

В данной реализации система АРУ является не задержанной.
2. РУ с изменяемой глубиной ОС (тоже режимная регулировка).

На транзисторе V1 собрана схема резонансного усилителя, а на - V2 собрана регулируемая обратная связь. Коэффициент усиления транзистора V2 регулируется изменением регулирующего Up.
В общем виде коэффициент усиления усилителя охваченного цепью обратной связи записывается в виде:

где: K – коэффициент усиления усилителя на транзисторе V1,а b - коэффициент передачи цепи обратной связи V2.
Если обеспечить регулировку величины b (Uр) то => (Uр) - тоже величина переменная.
Достоинство этой регулировки по сравнению с первой схемой: больший динамический диапазон, и глубина регулировки тоже больше.
3. Не режимный РУ (электрически управляемый аттенюатор).
Строится на основе регулировки сопротивления нагрузки усилителя:
В качестве переменного сопротивления применяются диодные сборки. На схеме: если Up= 0, то диоды открыты и коэффициент усиления максимален и наоборот.
Достоинство: простота. Недостаток: увеличение нелинейных искажений за счет применения диодов.
Глубина регулировки s = 25-30 дБ.
