

2.2. Необратимая схема включения бустера
В данной схеме включения бустера все усилие от шарнирного момента руля воспринимается бустером и до летчика не доходит.
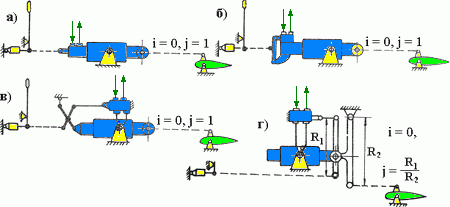
Для всех показанных на схеме вариантов включения бустера коэффициент передачи по усилиям равен нулю, а коэффициенты передачи по перемещениям отличны от нуля.
Необратимая схема обеспечивает управление самолетом на любых скоростях полета и при любых размерах рулевых поверхностей Она позволяет отказаться от аэродинамической компенсации рулевых поверхностей, что улучшает их аэродинамику. Жесткое защемление руля бустером способствует устранению рулевого флаттера, позволяя иногда отказаться от противофлаттерных грузов рулевых поверхностей. Необратимая схема упрощает включение в систему управления разного рода автоматических устройств, особенно при использовании электродистанционного управления.
Для сохранения чувства управления при необратимом бустере к командным рычагам летчика подключаются специальные загрузочные механизмы, создающие искусственным путем усилия на этих рычагах.
3. Загрузочные механизмы
На современных самолетах наибольшее распространение получили простые пружинные загрузочные механизмы (ЗМ).
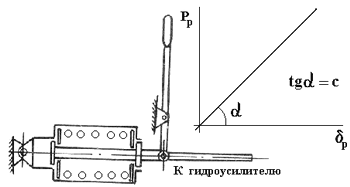
Основным элементом такого механизма является пружина, помещенная в корпусе и связанная штоком с проводкой управления. Обычно ЗМ стараются поместить как можно ближе к командному рычагу и сократить путь передачи усилий от этого механизма до летчика. Жесткость пружины подбирается так, чтобы усилия при максимальных отклонениях руля не превышали допустимых. Зависимость усилий от углов отклонения руля в таком механизме линейна и совершенно не зависит от скоростного напора.
При балансировочных отклонениях руля в длительном полете на командных рычагах летчик будет ощущать усилия, пришедшие от ЗМ. Триммером снять их нельзя, т.к. шарнирный момент руля летчиком не воспринимается. Поэтому при необратимой схеме триммеры на рулях не ставятся.
Для снятия балансировочных усилий устанавливается электромеханизм, перемещающий точку крепления ЗМ. Перемещая эту точку летчик расслабляет пружину и полностью снимает усилие на командном рычаге при заданном положении руля.
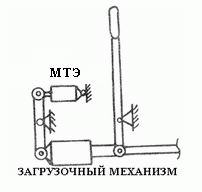
Такой механизм снятия балансировочных усилий получил название механизм триммерного эффекта.
Основным недостатком пружинных механизмов с линейной характеристикой является изменение расходов усилий по перегрузке с изменением скоростного напора. В результате летчику управление на малых скоростях полета кажется слишком тяжелым, а на больших скоростях - слишком легким, что опасно выводом самолета на закритические режимы.
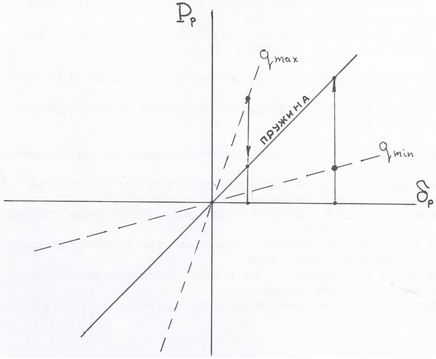
Исправить этот недостаток можно увеличением усилий при малых отклонениях руля и командного рычага, используемых на больших скоростях полета, и снижением усилий при больших отклонениях руля, которые обычно используются на малых скоростях. С этой целью используются ЗМ с нелинейной характеристикой, у которых желаемый эффект обеспечивается применением пружины с предварительной затяжкой или двух пружин разной жесткости и с разной предварительной затяжкой.
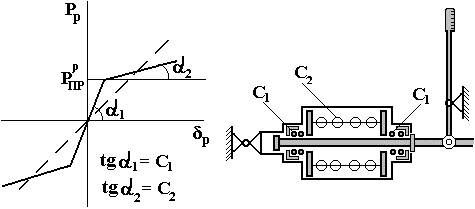
Принцип устройства и характеристика подобного механизма показаны на схеме.
Более совершенными являются загрузочные механизмы, учитывающие скоростной напор. Но из-за сложности и меньшей надежности такие механизмы широкого распространения не получили.