

1.6. Расстояние между двумя точками
Если нам известны координаты точек (естественно, в заданной системе координат), то однозначно известно их положение. Поэтому можно найти любые геометрические характеристики их взаимного расположения. Получим формулы, позволяющие по известным координатам двух точек вычислить расстояние между ними. В простейшем случае, когда две точки А1 и А2 находятся на одной оси, расстояние между ними определяется формулой
s = |x2 − x1|, (3)
где х1, х2 − координаты точек А1 и А2 соответственно. Очевидно, что расстояние от А1 до А2 равно расстоянию от А2 до А1, что и привело у к тому, что в формуле (3) появился знак модуля числа. Пусть на плоскости задана система координат ХОY, в которой координаты точки А1 равны х1 и у1, а координаты точки А2, соответственно, равны х2 и у2 (рис. 8).

рис. 8
В прямоугольном треугольнике А1А2В длина стороны А2В равна |х2 − х1|, а длина стороны А1В = |у2 − у1|, поэтому расстояние между точками А1 и А2 можно найти по теореме Пифагора:
s = √{(x2 − x1)2 + (y2 − y1)2}. (4)
26. Линейные операции над векторами. Линейные операции над векторами
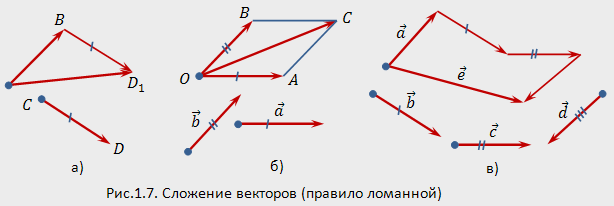
Сложение векторов
Пусть
даны два вектора ![]() и
и ![]() .
Приложим вектор
к
точке
(концу
вектора
)
и получим вектор
.
Приложим вектор
к
точке
(концу
вектора
)
и получим вектор ![]() (рис.1.7,а;
здесь и далее равные векторы отмечены
одинаковыми засечками).
Вектор
(рис.1.7,а;
здесь и далее равные векторы отмечены
одинаковыми засечками).
Вектор ![]() называется суммой
векторов
и
и
обозначается
называется суммой
векторов
и
и
обозначается ![]() .
Это нахождение суммы называется правилом
треугольника.
.
Это нахождение суммы называется правилом
треугольника.
Сумму
двух неколлинеарных векторов ![]() и
и ![]() можно
найти по правилу
параллелограмма.
Для этого откладываем от любой
точки
векторы
можно
найти по правилу
параллелограмма.
Для этого откладываем от любой
точки
векторы ![]() и
и ![]() ,
а затем строим параллелограмм
,
а затем строим параллелограмм ![]() (рис.
1.7,6). Диагональ
(рис.
1.7,6). Диагональ ![]() параллелограмма
определяет сумму:
параллелограмма
определяет сумму: ![]() .
.
Для
нахождения суммы нескольких векторов
можно построить ломаную из равных им
векторов. Тогда замыкающий
вектор,
соединяющий начало первого вектора
ломаной с концом последнего ее вектора,
равен сумме всех векторов ломаной. На
рис.1.7,в изображена сумма ![]() четырех
векторов
четырех
векторов ![]() .
Таким способом (правило
ломаной)
можно сложить любое конечное число
векторов. Заметим, что сумма векторов
не зависит от точек приложения слагаемых
и от порядка суммирования. Например,
"выстраивая цепочку" векторов для
суммы в виде
.
Таким способом (правило
ломаной)
можно сложить любое конечное число
векторов. Заметим, что сумма векторов
не зависит от точек приложения слагаемых
и от порядка суммирования. Например,
"выстраивая цепочку" векторов для
суммы в виде ![]() ,
получим вектор, равный вектору
,
получим вектор, равный вектору ![]() .
Если ломаная получилась замкнутой, то
сумма равна нулевому вектору.
.
Если ломаная получилась замкнутой, то
сумма равна нулевому вектору.

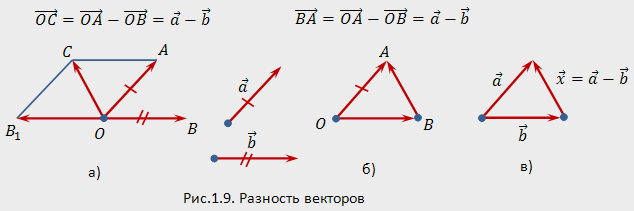
Вычитание векторов
Вектор ![]() называется противоположным вектору
,
если их сумма равна нулевому вектору:
называется противоположным вектору
,
если их сумма равна нулевому вектору: ![]() .
Противоположный вектор
.
Противоположный вектор ![]() имеет
длину
имеет
длину ![]() ,
коллинеарен и противоположно направлен
вектору
(рис.1.8,а,б).
Нулевой вектор является противоположным
самому себе.
,
коллинеарен и противоположно направлен
вектору
(рис.1.8,а,б).
Нулевой вектор является противоположным
самому себе.

Разностью
векторов
и
называется
сумма вектора
с
вектором ![]() ,
противоположным вектору
:
,
противоположным вектору
:
![]()
Для
нахождения разности векторов
и
приложим
к произвольной точке
векторы ![]() ,
а также вектор
,
а также вектор ![]() ,
противоположный вектору
(рис.1.9,а).
Искомую разность находим по правилу
параллелограмма:
,
противоположный вектору
(рис.1.9,а).
Искомую разность находим по правилу
параллелограмма:
Для
нахождения разности проще использовать
правило треугольника (рис. 1.9,6). Для этого
прикладываем к произвольной
точке
векторы
.
Вектор ![]() при
этом равен искомой разности
при
этом равен искомой разности ![]() .
.
Вычитание
векторов — действие, обратное сложению
— можно определить также следующим
образом: разностью
векторов
и
называется
такой вектор ![]() ,
который в сумме с вектором
дает
вектор
(рис.1.9,в),
т.е. разность
,
который в сумме с вектором
дает
вектор
(рис.1.9,в),
т.е. разность ![]() —
это решение уравнения
—
это решение уравнения ![]() .
.
Пример 1.2. Для векторов на рис. 1.6 найти следующие суммы и разности:
Решение. Учитывая
равенство ![]() ,
получаем по правилу треугольника
,
получаем по правилу треугольника ![]() .
.
Поскольку ![]() и
и ![]() ,
то
,
то ![]() .
.
По
правилу параллелограмма ![]() .
.
Так
как ![]() и
и ![]() ,
находим
,
находим
Умножение вектора на число
Произведением
ненулевого вектора а на действительное
число ![]() называется
вектор
называется
вектор ![]() ,
удовлетворяющий условиям:
,
удовлетворяющий условиям:
1)
длина вектора
равна ![]() ,
т.е.
,
т.е. ![]() ;
;
2)
векторы
и
коллинеарные ![]() ;
;
3)
векторы
и
одинаково
направлены, если ![]() ,
и противоположно направлены, если
,
и противоположно направлены, если ![]() .
.
Произведение
нулевого вектора на любое число ![]() считается
(по определению) нулевым вектором:
считается
(по определению) нулевым вектором: ![]() ;
произведение любого вектора на число
нуль также считается нулевым вектором:
;
произведение любого вектора на число
нуль также считается нулевым вектором: ![]() .
Из определения произведения следует,
что:
.
Из определения произведения следует,
что:
а)
при умножении на единицу ![]() вектор
не изменяется:
вектор
не изменяется: ![]() ;
;
б)
при умножении вектора на ![]() получается
противоположный вектор:
получается
противоположный вектор: ![]() ;
;
в) деление
вектора на отличное от нуля число ![]() сводится
к его умножению на число
сводится
к его умножению на число ![]() ,
обратное
,
обратное ![]() .
.
г)
при делении ненулевого вектора
на
его длину, т.е. при умножении
на
число ![]() получаем
единичный вектор, одинаково направленный
с вектором
.
получаем
единичный вектор, одинаково направленный
с вектором
.
Действительно,
длина вектора ![]() равна
единице:
равна
единице: ![]() .
.
Вектор
коллинеарен
и одинаково направлен с вектором
,
так как ![]() ;
;
д)
при умножении единичного вектора на
число
получаем
коллинеарный ему вектор, длина которого
равна ![]() .
.
На
рис.1.10 изображены векторы, получающиеся
в результате умножения данного
вектора
на ![]() и
и ![]() ,
а также противоположный вектор
,
а также противоположный вектор ![]() .
.

Свойства линейных операций над векторами
Сложение
векторов и умножение вектора на число
называются линейными
операциями над векторами.
Для
любых векторов ![]() и
любых действительных чисел
и
любых действительных чисел ![]() справедливы
равенства:
справедливы
равенства:
Свойства 1, 2 выражают коммутативность и ассоциативность операции сложения векторов, свойство 5 — ассоциативность операции умножения на число, свойства 6,7 — законы дистрибутивности, свойство 8 называется унитарностью.