

4.3.2 Децентралізована асрч і м внііе
Принцип роботи децентралізованої системи також розглядається на прикладі автономної енергосистеми, коли навантаження між ЧРЕС розподіляється по рівності відносного приросту витрат.
Як загальний параметр розподілу навантажень використовуються інтегральна функція відхилення частоти і пропорційне їй значення відносного приросту витрат у ЕЕС.
Основні труднощі реалізації методу складаються в необхідності однакового виміру на усіх ЧРЕС, що можливо лише за умови, що відхилення частоти виміряється стосовно частоти еталонного джерела, що володіє дуже малою похибкою, оскільки для створення регулюючого впливу використовується інтегральна функція. Таким чином, вce ЧРЕС повинно бути постачено еталонними генераторами частоти 50 Гц і повинна бути організована періодична перевірка їхньої точності.
Інший спосіб реалізації децентралізованої системи базується на вимірі , формуванні інтегральної функції в єдиному центрі, наприклад на ЦДП, і передачі значення системного відносного приросту витрат як єдиного параметра на всі ЧРЕС засобами телемеханіки, де воно використовується для визначення запропонованого значення потужності по ХОП.
С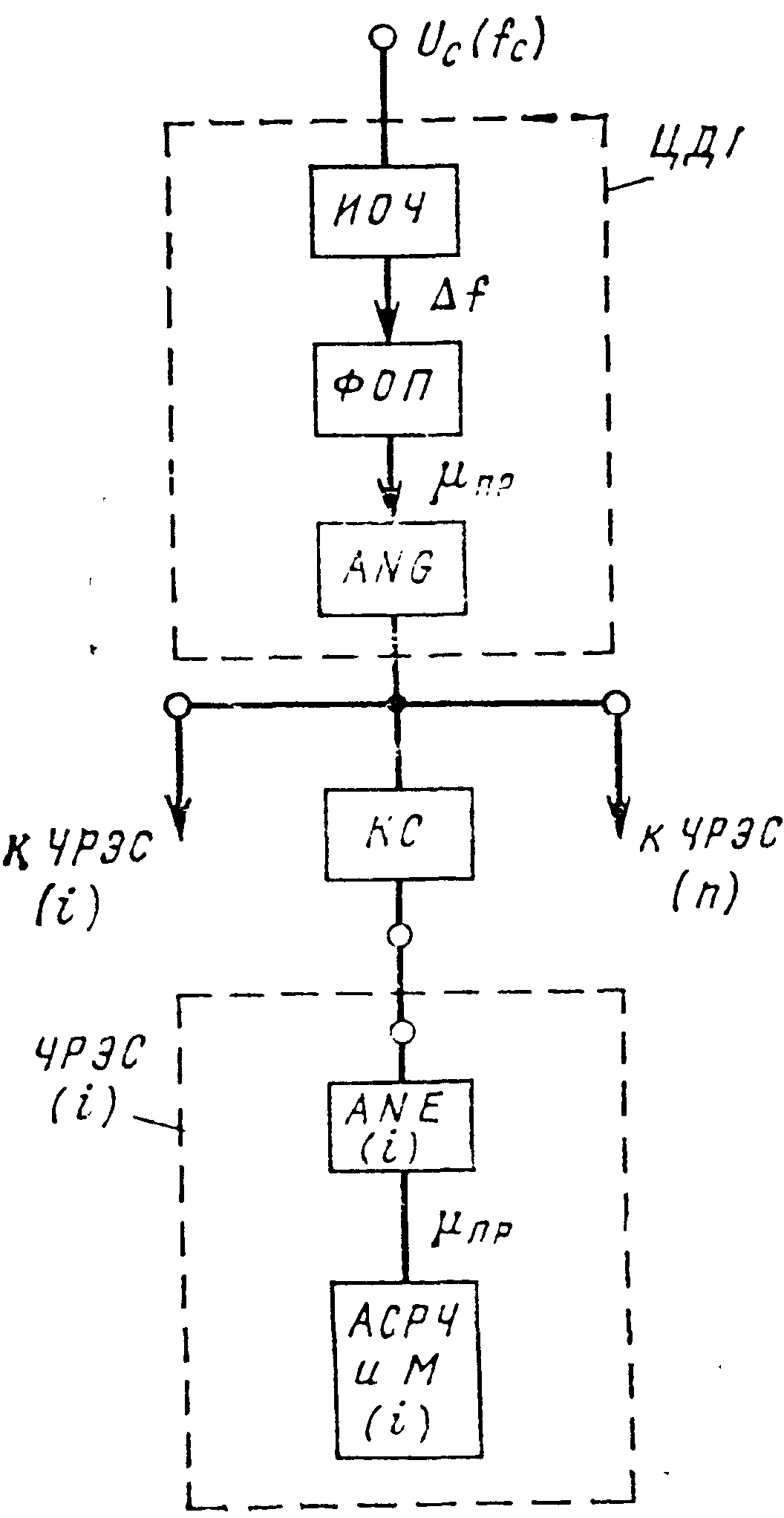 прощена
принципова схема розглянутої системи
показана на рис. 4.13. Технічні засоби
системи розділяються на системну і
Рисунок 4.13 -Принципіальна схема
децентралізованих АСРЧ і М ВНІІЕ
прощена
принципова схема розглянутої системи
показана на рис. 4.13. Технічні засоби
системи розділяються на системну і
Рисунок 4.13 -Принципіальна схема
децентралізованих АСРЧ і М ВНІІЕ
станційну частини. Для передачі
регулюючого впливу на ЧРЕС використовуються
лінії зв'язку ЦДП з ЧРЕС, на яких
організується один симплексний (див.
гл. 1) канал зв'язку КС. У системній частині
АСРЧ і М, установленої на ЦДП, ІОЧ фіксує
відхилення частоти
,сигнал
який надходить в формувач системного
відносного приросту витрат
,
ФОП у виді інтегральної функції відхилення
частоти, потім за допомогою передавача
телевимірювання ANG і
каналу зв'язку KC, значення
![]() передається на всі ЧРЕС. Характер сигналу
в КС залежить від прийнятого типу
телемеханічної системи (див. гл. 1).
передається на всі ЧРЕС. Характер сигналу
в КС залежить від прийнятого типу
телемеханічної системи (див. гл. 1).
Станційна частина містить приймач телевимірювання ANGi ,що перетворить телемеханічний сигнал у значення , що надходить у станційну частину АСРЧ і М, що залежить від типу ЧРЕС.
На рис. 4.14 представлена станційна частина блокової ТЕС, де для кожного блоку парогенератор-турбіна має свій пристрій завдання потужності УЗМ , що за значенням в функціональному перетворювачі формує сигнал, що відповідає запропонованому значенню потужності - блоку .
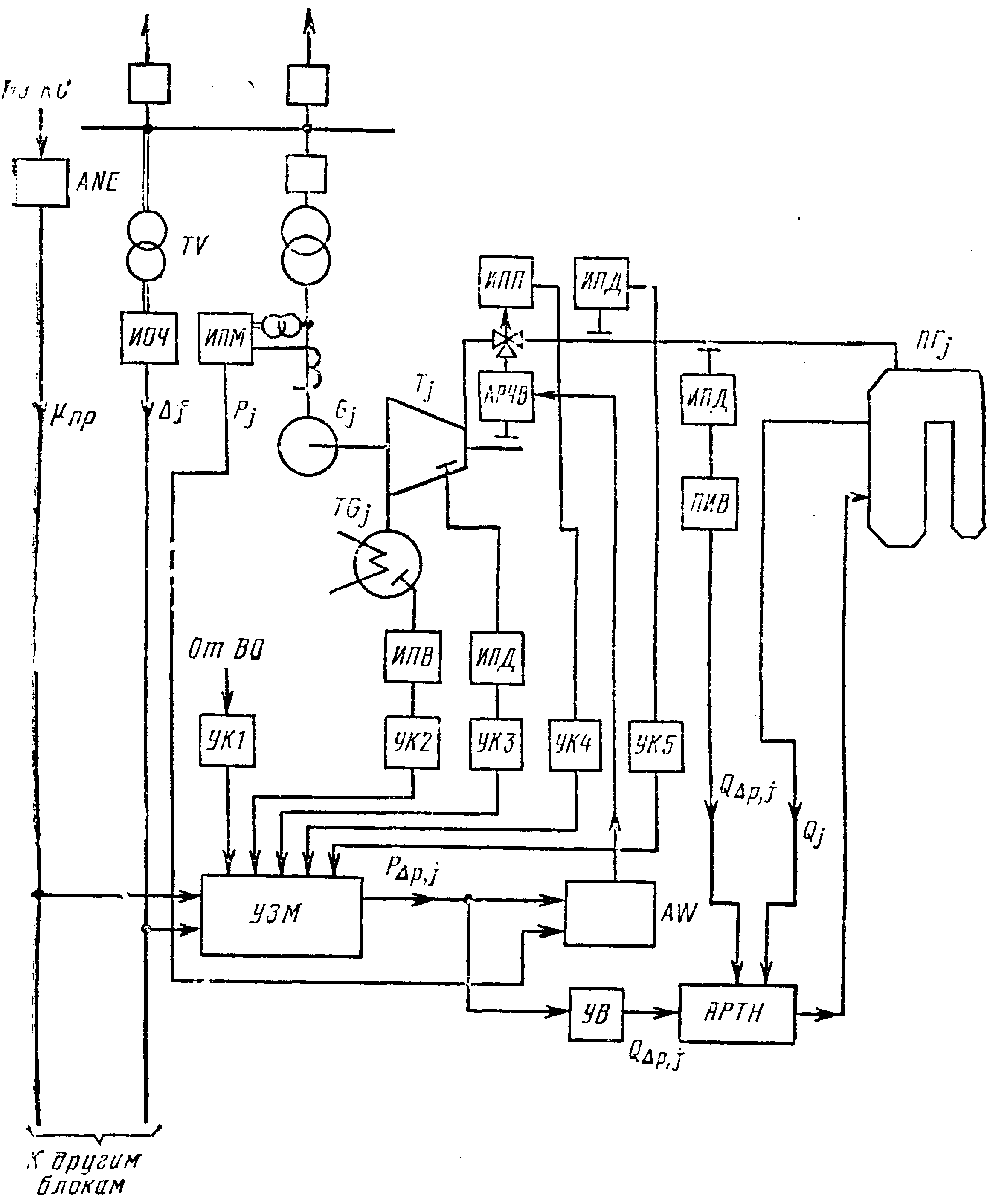
Рисунок 4.14 – Принципова схема станційної частини АСРЧ М ВНИИЕ для блока парогенератор-турбіна
Виконання УЗМ залежить від виду сигналу й, апаратури, використовуваних у системі. Для поліпшення динамічних властивостей АСРЧ і М в У3М вводиться сигнал по , одержуваний від ІОЧ, установленого на ЧРЕС.
У пропорційно-інтегральному регуляторі потужності AW відбувається порівняння і і формується керуюче вплив на АРЧВ турбіни. Значення Рj, виходить від вимірювального перетворювача потужності ІПМ, установленого на агрегаті. Функціонування розглянутої АСРЧ і М в цілому відбувається аналогічно функціонуванню централізованої АСРЧ і М, описаному вище.
Як вказувалося, для ТЕС АСРЧ і М повинна
забезпечувати одночасний вплив на. АРЧВ
турбіни і на автоматичний регулятор
теплового навантаження парогенератора
(АРТН) з корекцією по тиску пари перед
регулювальними клапанами. З цією метою
одночасно із УЗМ значення
надходить у пристрій введення УВ, де
.по лінійному законі визначається
завдання теплового навантаження![]() .
В АРТН порівнюється значення
.
В АРТН порівнюється значення
![]() з
поточним значенням навантаження
з
поточним значенням навантаження
![]() .
Оскільки дійсна функціональна залежність
.
Оскільки дійсна функціональна залежність
![]() нелінійна, в АРТН вводиться коригувальний
вплив по відхиленню тиску пари
нелінійна, в АРТН вводиться коригувальний
вплив по відхиленню тиску пари
![]() яке формується в пропорційно-інтегральному
виявленні ПІВ за законом
яке формується в пропорційно-інтегральному
виявленні ПІВ за законом
![]()
де
![]() і
і
![]() -
коефіцієнти пропорційності.
-
коефіцієнти пропорційності.
Автоматичний регулятор теплового навантаження впливає на традиційну систему регулювання блоку парогенератор-турбіна. У сталому режимі описана схема забезпечує сталість частоти і тиску пари при заданому значенні навантаження блоку, У процесі експлуатації блоку змінюються характеристики окремих елементів і потрібна корекція ХОП блоку і його регулювального діапазону. Для цієї мети служать пристрої корекції УК, що одержують інформацію від відповідних вимірювальних перетворювачів: вакууму в конденсаторі ІПВ-УК2; тиску пари в регулюючій ступіні ІПД-УКЗ; положення регулювальних клапанів ІПП-УК4 і тиску пари перед турбіною ІПД-УК5. Пристрій корекції КК1 діє при зміні складу допоміжного устаткування.
Як вказувалося, АСРЧ і М ВНІІЕ може бути реалізована без каналу зв’язку з ЦДП, якщо на ЧРЕС будуть встановлені еталонні генератори частоти (ЕГЧ),. fэ=50 Гц. Досвід розробки генераторів з малою ймовірністю показує, що створення стабільних еталонних генераторів великих частот, вимірюваних кіло- і мегагерцами, не представляє особистих трудностей. Однак для зниження частоти до 50 Гц вимагаються багатоступінчасті перетворювачі, у яких може накопичуватися значна ймовірність, для усунення якої вимагаються складні технічні засоби.
Для формування та ЧРЕС системного
відносного приросту витрат
із застосуванням ЕГЧ раніше
використовувалася схема, у якій
вимірювальним перетворювачем відносного
приросту витрат в ЕЕС служив індукційний
перетворювач-сельсин. Статорна обмотка
сельсина наповнюється напругою мережі,
а обмотка збудження- від ЕГЧ. Момент, що
розвивається на валу індукційного
перетворювача, залежить від магнітного
потоку статора Фс і ротора Фр і
кута зрушення фаз між ними
![]() .При
.При
![]() кут поворота ротора сельсина пропорційний
інтегральної функції відхилення частоти
про систему від еталонної fе=
50 Гц. Наступаюче перетворення кута
повороту в електричний сигнал може бути
.реалізовано по-різному, зокрема за
допомогою другого сельсина.
кут поворота ротора сельсина пропорційний
інтегральної функції відхилення частоти
про систему від еталонної fе=
50 Гц. Наступаюче перетворення кута
повороту в електричний сигнал може бути
.реалізовано по-різному, зокрема за
допомогою другого сельсина.
Децентралізована АСРЧ і М володіє тією перевагою, що дозволяє вносити корективи в ХОП безпосередньо на станції шляхом введення в УЗМ коригувальних сигналів. Недоліком децентралізованої системи є відсутність можливості зміни режиму окремих ЧРЕС диспетчером у процесі оперативного керування режимом роботи енергосистеми, що суперечить основному принципу диспетчерського керування.