

4.3.1 Централізована асрч і м оргруес
Спрощена структурна схема розглянутої
системи показана на рис. 4.12. Основною
її особливістю є формування загального
параметра і здійснення розподілу
навантаження по ХОП окремих частоторегулюючих
електростанцій на ЦДЛ електроенергетичної
системи. Оскільки частота є єдиний
параметр ЕЕС, її відхилення
від
запропонованого значення може вимірятися
на ЦДП за допомогою вимірювального
органа частоти ІОЧ з будь-якою
частотовимірювальною схемою. Сигнал
відхилення частоти
від
ІОЧ надходить у пристрій формування
відносного приросту ФОП, а потім у
пристрій розподілу активної потужності
диспетчерського пункту УРАМ-Д, що містить
функціональні перетворювачі ФП по числу
ЧРЕС. У ФОП формується інтегральна
функція відхилення частоти і пропорційне
її значення відносного приросту витрат
в енергосистемі
![]()
Функціональні перетворювачі призначені для перетворення відносного приросту в значення по ХОП даної частоторегулюючої станції.
Сигнал запропонованого значення активної потужності подається на вхід передавача телевимірювання ANGi.
Характеристика відносного приросту витрати енергоносія частоторегулюючої станції представляється нелінійною функцією перетворення в . У якості ФП у системі ОРГРЭС використовувався електромеханічний перетворювач з електродвигуном, а ХОП електростанції реалізується у виді шаблона з копіркоюЮ, з'єднаним з індукційним перетворювачем, що відповідає зміні вихідної напруги яким являється сигнал
Для кожної ЧРЕС створюється свій канал
зв'язку КС и передбачається та чи інша
система телевимірювання. В АСРЧ і М
ОРГРЕС використовувалася частотна
система телевимірювання, причому ANG
забезпечувався елементом для ручного
впливу РВ, що дозволяють змінювати
значення
за
вказівкою диспетчера. На ЧРЕС установлюється
приймач телевимірювання
![]() ,
в якому частотний сигнал, що несе
інформацію про
підсилюється,
перетворюється і надходить у пристрій
прийому завдання ПЗ, а потім і пристрій
розподілу активної потужності
електростанції УРАМ-С, що містить
функціональні перетворювачі ФП по m
агрегатів, що беруть участь у
регулюванні частоти, і відповідні
виконавчі елементи ІЕ.
,
в якому частотний сигнал, що несе
інформацію про
підсилюється,
перетворюється і надходить у пристрій
прийому завдання ПЗ, а потім і пристрій
розподілу активної потужності
електростанції УРАМ-С, що містить
функціональні перетворювачі ФП по m
агрегатів, що беруть участь у
регулюванні частоти, і відповідні
виконавчі елементи ІЕ.
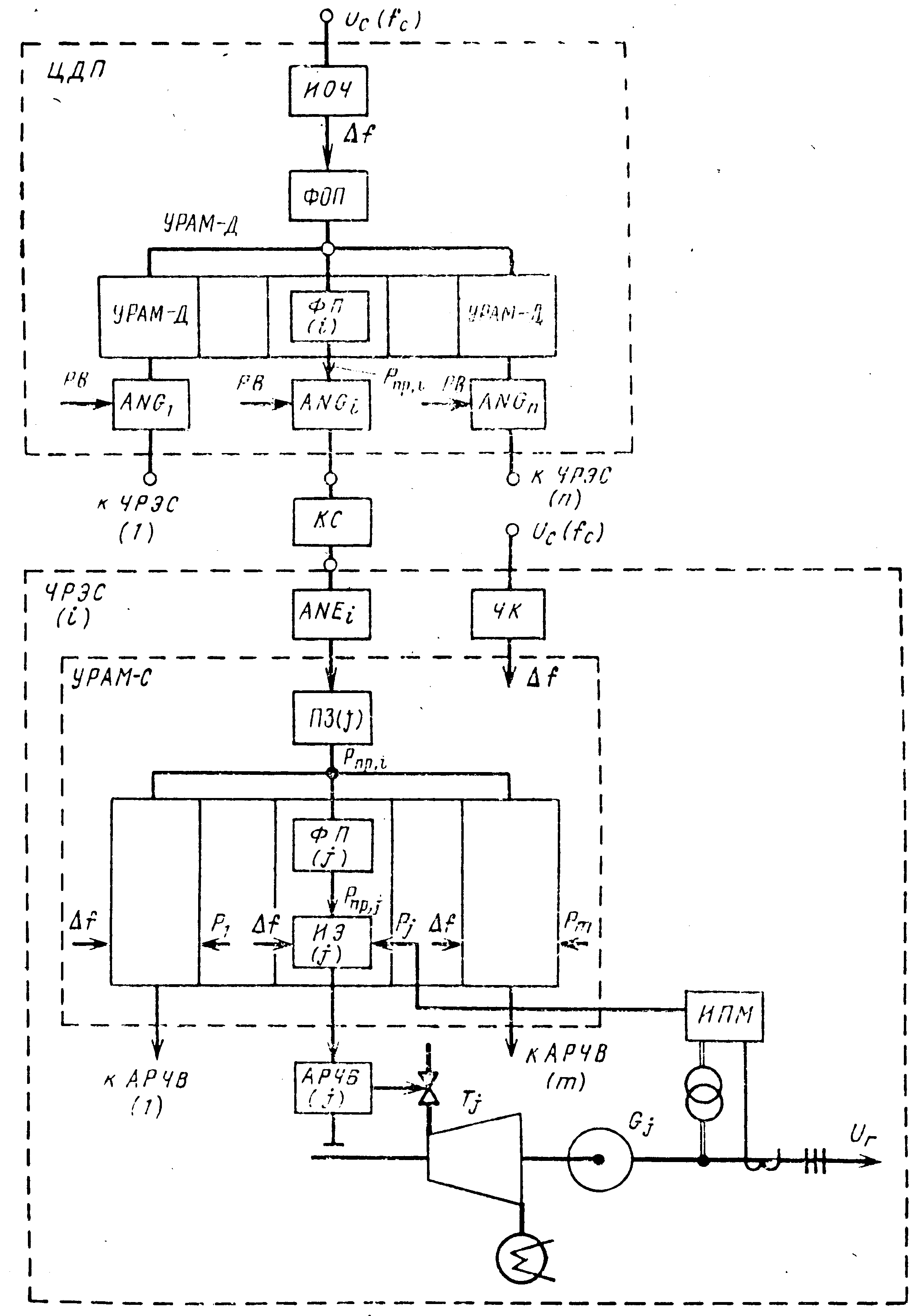
Рисунок 4.12- Принципова схема централізованої
Асрч і м оргрес
У приймачі завдання ПЗ сигнал, отриманий
від ANE, перетвориться в
інший сигнал, більш придатний для
подальшого функціонального перетворення
в запропоноване значення потужності
![]() турбоагрегату,
що бере участь .у регулюванні частоти
по оптимальному законі розподілу
навантаження електростанції
між турбоагрегатами. Приймач завдання
володіє здатністю зберігати на своєму
виході значення
при
зникненні сигналу і каналі зв'язку в
результаті його пошкодження, рівне
передавальне по каналі зв'язку до
виникнення пошкодження.
турбоагрегату,
що бере участь .у регулюванні частоти
по оптимальному законі розподілу
навантаження електростанції
між турбоагрегатами. Приймач завдання
володіє здатністю зберігати на своєму
виході значення
при
зникненні сигналу і каналі зв'язку в
результаті його пошкодження, рівне
передавальне по каналі зв'язку до
виникнення пошкодження.
Для формування предписанного значения потужності агрегатам використовуються функціональні перетворювачі, що перетворюють у відповідность з ХОП турбоагрегату запропоноване значення потужності електростанції у запропоноване значення потужності агрегату
Виконавчий елемент, що впливає на МІЧВ
АРЧВ агрегату, реалізує вихідний сигнал
за законом![]() ,
чим забезпечується оптимальний розподіл
навантаження між агрегатами. Значення
,
чим забезпечується оптимальний розподіл
навантаження між агрегатами. Значення
![]() виходить від вимірювального перетворювача
потужності ІПМ, установленого на кожнім
агрегаті. Здійснення
виходить від вимірювального перетворювача
потужності ІПМ, установленого на кожнім
агрегаті. Здійснення
![]() вводиться в ІЕ від частотного коректора
ЧК для підвищення стійкості системи і
якості регулювання і для забезпечення
участі даної електростанції в регулюванні
частоти і потужності в енергосистемі
при пошкодженні каналу звязку, коли
вводиться в ІЕ від частотного коректора
ЧК для підвищення стійкості системи і
якості регулювання і для забезпечення
участі даної електростанції в регулюванні
частоти і потужності в енергосистемі
при пошкодженні каналу звязку, коли
![]() а
отже, і
а
отже, і
![]() перестають змінюватися. У цьому випадку
вплив
забезпечує
участь даної станції в регулюванні
потужності із статизмом по частоті.
Виконання виконавчого елемента залежить
від типу двигуна МІЧВ і способу керування.
перестають змінюватися. У цьому випадку
вплив
забезпечує
участь даної станції в регулюванні
потужності із статизмом по частоті.
Виконання виконавчого елемента залежить
від типу двигуна МІЧВ і способу керування.
Розглянута АСРЧ і М функціонується
наступним способом. При порушенні
балансу активної потужності і виникненні
![]() формулювання відносного приросту змінює
попереднє значення
формулювання відносного приросту змінює
попереднє значення![]() ,
що супроводжується зміною
для всіх ЧРЕС, на яких починається зміна
потужності,
усіх турбоагрегатів, що беруть участь
у регулюванні частоти. Баланс активної
потужності починає відновлюватися, що
приводить до відновлення частоти і
припиненню зміни
,
що супроводжується зміною
для всіх ЧРЕС, на яких починається зміна
потужності,
усіх турбоагрегатів, що беруть участь
у регулюванні частоти. Баланс активної
потужності починає відновлюватися, що
приводить до відновлення частоти і
припиненню зміни
![]() отже,
і
.
Однак процес регулювання потужності
на окремих турбоагрегатах припиняється
лише після того, як потужність Р j
стає рівною Pnp,j.
отже,
і
.
Однак процес регулювання потужності
на окремих турбоагрегатах припиняється
лише після того, як потужність Р j
стає рівною Pnp,j.
Достоїнством розглянутої централізований АСРЧ і M являється наявність окремого канала зв’язку між ЦДП і ЧРЕС, що дозволяє диспетчеру змінювати , ручним впливом РВ з врахуванням інших вимог, що виникають у процесі оперативного керування режимом роботи енергосистеми, що відповідає основному принципу диспетчерського керування.
Основним її недоліком є те, що формування для ЧРЕС по їх ХОП відбувається на ЦДП. При цьому всяка зміна складу і характеристик устаткування на електростанції приводить до порушення її економічного режиму доти , поки на ЦДП у відповідному ФП УРАМ-Д не буде зроблена корекція. Цей недолік АСРЧ і М визначив появу нової системи, запропонованої в 1953 р. у ВНІІЕ.