

3.3.2 Гідромеханічний арчо
Відповідно до приведеної на рис. 3.8 структурної схеми може бути виконаний найпростіший гідромеханічний АРЧО, який знаходить застосування на парових турбінах малої потужності. Принципова схема такого регулятора показана на рис. 3.10, де в якості вимірювального перетворювача є відцентровий маятник 1, предписывающим елементом — МЗЧО 2, суматором — головний важіль 3, а перетворювально-підсилюючим елементом - гідравлічний двигун із золотниковим управлінням 4. Жорсткий від’ємний зворотний зв'язок реалізований механічним зв'язком двигуна з суматором 3. Гідравлічний двигун впливає на паровпускний клапан турбіни 5.

Рисунок 3.10 - Найпростіший гідромеханічний АРЧО:
д- лінія тиску робочої рідини; с - лінія зливу робочої рідини
Для вивчення способів реалізації законів регулювання частоти і потужності за допомогою АРЧО і основних критеріїв їх стійкості при перехідних процесах необхідно знати характеристики окремих елементів регулятора. Нижче розглянута дія і основні динамічні характеристики елементів гідромеханічного АРЧО.
3.3.3 Відцентровий маятник (рис. 3.11). Механічний вимірювальний перетворювач у вигляді відцентрового маятника складається з вантажів 1, передачі важеля 2, пружини 3 і муфти 4, і перетворить кутову частоту обертання ω в переміщення муфти вздовж координати y при зміні ω.

Рисунок 3.11- Відцентровий маятник
Спрощене рівняння сил, діючих на муфту маятника, записується у вигляді
![]() (3.14)
(3.14)
де m — маса маятника; rн — початковий радіус обертання; Δr— приріст радіуса при зміщенні вантажів; κ— коефіцієнт жорсткості пружини; λ — коефіцієнт пропорційності між радіусом обертання r і координатою у.
При постійності ω створюється рівновага сил і ψ (ω, у)=0, а при порушенні рівноваги і відхиленні координат Δω і Δr виникає приріст функції Δψ (ω, у)=0, рівне сумі сили інерції і сили демпфірування:
![]() (3.15)
(3.15)
Якщо розкласти Δψ (ω, у) в ряд Тейлора по ступенях Δω і Δr і обмежитися лінійною частиною, то співвідношення (3.15) прийме вигляд:
![]()
Значення коефіцієнтів![]() і
і
![]() визначаться
з рівняння (3.14).
визначаться
з рівняння (3.14).
Переходячи до відносних приростів координат
![]() і
і
![]() ,
,
можна отримати диференціальне рівняння руху маятника
![]() (3.16)
(3.16)
де Tm- постійна часу інерції маятника; Td - постійна часу демпфірування; δм - залишкова нерівномірність маятника,
![]() ;
;
ωman; ωmin — максимальне і мінімальне значення кутової частоти обертання, на які розраховується маятник.
В тих випадках, коли через малі Tm і Td немає необхідності враховувати перехідний процес, обумовлений інерційними силами і силами демпфірування, (3.16) спрощується:
![]() (3.17)
(3.17)
При цьому передавальна функція вимірювального перетворювача записується у вигляді
![]() . (3.18)
. (3.18)
В регуляторах парових турбін для
поліпшення процесу регулювання окрім
вимірювального перетворювача координати
ω застосовують перетворювач прискорення
![]() створюючи комбінований механічний
вимірювальний перетворювач шляхом їх
з'єднання механічним суматором.
створюючи комбінований механічний
вимірювальний перетворювач шляхом їх
з'єднання механічним суматором.
3.3.4 Перетворюючо-підсилювальний механізм. Система регулювання турбін не може функціонувати без великого підсилення регулюючої дії, так як для переміщення клапанів
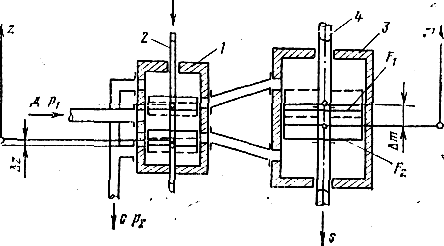
Рисунок 3.12 - Гідравлічний двигун
в пристрої паророзподілення парової турбіни або переміщення направляючого апарату гідравлічної турбіни потрібні великі зусилля, які виміряються в тоннах. Для такого підсилення використовуються гідравлічні підсилювачі і двигуни, в яких в якості робочої рідини застосовується масло під тиском. Останнім часом для могутніх парових турбін з ціллю підвищення пожежозахисту починають застосовувати незаймисті рідини.
3.3.5 Гідравлічний двигун. Гідравлічний двигун складається із золотника управління і власне гідравлічного двигуна. В системах регулювання турбін використовуються відсічні і проточні золотники.
Нижче розглянутий гідравлічний двигун
з відсічним золотником управління,
спрощено зображений на рис. 3.12. Золотник
складається з букси 1 і двотарільчатого
поршня 2. В буксі середнє ліве вікно
сполучено з джерелом робочої рідини,
що знаходиться під тиском р1.
Верхнє і нижнє ліві вікна з’єднанні із
зливним резервуаром, тиск в якому близько
до атмосферного(р2![]() 0).
Праві вікна в буксі сполучені з верхньою
і нижньою порожнинами гідравлічного
двигуна. Власне гідравлічний двигун
складається з циліндра 3 і поршня з
штоком 4.
0).
Праві вікна в буксі сполучені з верхньою
і нижньою порожнинами гідравлічного
двигуна. Власне гідравлічний двигун
складається з циліндра 3 і поршня з
штоком 4.
Коли відсутня управляюча дія на поршень золотника, він знаходиться в нейтральному положенні і його тарілки перекривають праві вікна букси, відсікаючи їх трубопроводи від джерела робочої рідини. Практично не стискуюча робоча рідина запобігає переміщенню поршня під впливом зусилля S, що виникає на регулюючому органі. При зсуві штока золотника (зміні координати z) частково або повністю відкриваються його вікна і масло під тиском р1 потрапляє в одну порожнину циліндра, тоді як інша порожнина через верхнє або нижнє вікно з'єднується із зливом і тиск там падає до р2 . Починається переміщення поршня двигуна і зміна координати m, яке відбувається до тих пір, поки відкриті праві вікна золотника, тобто поки є відхилення координати Δz від нейтрального значення. Переміщення поршня двигуна припиниться, коли поршень золотника повернеться в нейтральне положення або коли поршень двигуна прийде в крайнє положення, визначне його робочим ходом.
За принципом дії гідравлічний двигун інтегрує управляючу дію. Рівняння руху поршня двигуна може бути отримано з наступних співвідношень:
рівняння рівноваги сил на поршні F1p1=F2р2 — S, де F1, F2 — площі поршня у верхній і нижній порожнинах (в загальному випадку різні), далі приймається F1=F2= F
рівняння витрати масла при відкритому вікні золотника і русі поршня Fdm=nκ(p1-p2)dt де n — відкритий перетин золотника; κ— коефіцієнт зв'язку швидкості перетікання масла і тиску.
Рішення вказаних рівнянь визначає
швидкість руху поршня![]() як функцію п. Переходячи до відносних
приростів координат
як функцію п. Переходячи до відносних
приростів координат
![]()
де тmах — максимальний робочий
хід поршня; nmax— максимальне
відкриття перетину золотника; і
враховуючи, що![]() ,
можна отримати рівняння руху поршня
двигуна
,
можна отримати рівняння руху поршня
двигуна
![]() (3.19)
(3.19)
де Тд—постійна часу двигуна.
Отримане диференціальне рівняння руху підтверджує, що гідравлічний двигун є інтегруючою ланкою з передавальною функцією
![]() (3.20)
(3.20)
3.3.6 Гідравлічний підсилювач. Гідравлічний двигун, забезпечений механізмом виключення (жорстким від’ємним зворотнім зв'язком), перетворюється на гідравлічний підсилювач. Виключення в механічній системі здійснюється сумуючим важелем (рис. 3.13,а), на якому може бути зафіксовано три координати: у — в точці прикладання управляючої дії; z — в точці приєднання золотника; m —в точці, що фіксує зміну положення поршня двигуна.
 Рисунок
3.13 - Гідравлічний підсилювач: а -
геометричні співвідношення для базисних
значень координат; б - геометричні
співвідношення для приростів координат
Рисунок
3.13 - Гідравлічний підсилювач: а -
геометричні співвідношення для базисних
значень координат; б - геометричні
співвідношення для приростів координат
Координата z є функцією у і m . На рис. 3.13,а показані геометричні співвідношення, що дозволяють знайти взаємозв'язок базисних значень координат уmax, zmax, mmax:
![]()
Із співвідношень для приростів Δу, Δz, Δm, показаних на рис. 3.13,б, може бути отримана шукана функціональна залежність
![]()
З приведених виразів, переходячи до відносних приростів координат, можна отримати рівняння руху золотника
![]() (3.21)
(3.21)
Підстановка значень σ в (3.19) визначає диференціальне рівняння руху гідравлічного підсилювача
![]() (3.22)
(3.22)
Гідравлічний підсилювач є інерційною ланкою першого роду з передавальною функцією
![]() (3.23)
(3.23)
3.3.7 Механізм зміни частоти обертання. Як вказувалося, для зміни уставки регулятора і переміщення його статичної характеристики на ньому встановлюється МЗЧО. Одним із способів виконання МЗЧО показаний на рис. 3.14. Рукоятка механізму 1 при обертанні переміщує вгору і вниз шток 2, який у свою чергу переміщує важіль-повторювач 3 головного важеля суматора 4. Нейтральному положенню золотника 5 відповідають різні положення штока поршня двигуна 6 і муфти маятника 7. На рис. 3.14 пунктиром показано положення механізму регулятора при зниженій частоті обертання.

Рисунок 3.14- Ілюстрація принципу дії МЗЧО
Сумісне рішення рівнянь вимірювального перетворення (3.17) і гідравлічного підсилювача (3.22) дозволяють отримати диференціальне рівняння руху регулятора:
![]() (3.24)
(3.24)
Передавальна функція регулятора записується у вигляді
![]() (3.25)
(3.25)
Рівняння руху регулятора (3.24) дозволяє
зробити висновок, що у вставленому
режимі (![]() )
кожному положенню регулюючого органу
μ відповідає певне значення частоти
обертання φ, тобто розглянутий регулятор
функціонує за законом статичного
регулювання.
)
кожному положенню регулюючого органу
μ відповідає певне значення частоти
обертання φ, тобто розглянутий регулятор
функціонує за законом статичного
регулювання.