

9 Моделирование кривых и поверхностей в форме Безье
Представление кубических кривых в форме Безье.
Кубическая кривая в форме Безье описывается при помощи четырех точек ( P1, P2, P3, P4 ), при этом отрезки P1, P2 и P3, P4 определяют направление касательных векторов.
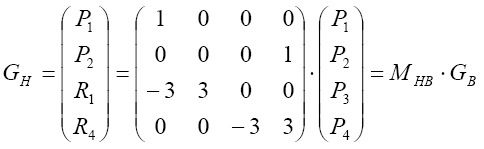
С математической точки зрения форма Эрмита и форма Безье описывает одну и ту же кривую. Поэтому между этими двумя формами описания сегментов можно ввести соотношение:
Используя выражение
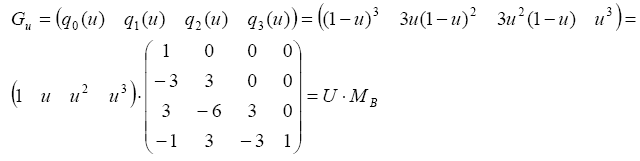
![]() найдем уравнения для формы Безье:
найдем уравнения для формы Безье:
![]()
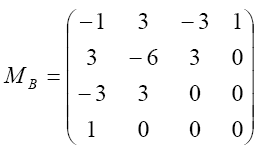
где T - вектор степеней параметров, MB - матрица Безье, а GB – геометрическая матрица Безье, описывающая исходные данные:

При этом матрица Безье имеет следующий вид:
По сравнению с формой Эрмита форма Безье имеет следующие преимущества:
• сегмент кривой удобно задавать в интерактивном режиме по четырем точкам;
• четыре точки определяют четырехугольник, который может использоваться в качестве выпуклой оболочки в процедуре удаления невидимых линий и поверхностей.
Недостатком данной формы, по сравнению с формой Эрмита является то, что она не позволяет с математической точностью определить гладкость сопряжения сегментов.
Чаще всего в системах проектирования и конструирования, формы Безье и Эрмита используется совместно. При помощи формы Безье происходит интерактивный ввод кривых, а достижение требуемой гладкости обеспечивается переходом от формы Безье к форме Эрмита с последующей коррекцией величин касательных.
Формы Эрмита и Безье является наиболее простым представлением кубических кривых. Они обладают следующими общими недостатками:
• изменение координат хотя бы одной точки приводит к необходимости изменений всей кривой;
• добавление узла в кривую также приводит к необходимости пересчета всей кривой.
Модель поверхности формы Безье.
Для описания кривой
линии в форме Безье было достаточно
четырех точек в трехмерном пространстве.
Для описания сегмента поверхности
требуется 4*4=16 точек. При этом сегмент
поверхности аппроксимируется
многогранником, у которого только четыре
угловые точки совпадают с точками самой
аппроксимируемой поверхности. Остальные
определяют охватывающий многогранник.
Таким образом, матрица описания сегмента
в форме Безье будет содержать координаты
шестнадцати точек:
![]() .
.
Уравнение, определяющее один сегмент поверхности Безье, будет иметь бикубическую форму:
 (1)
(1)
где параметры u є [0,1]; t є [0,1] , а функции

Данная кривая описывает бикубическую пространственную форму. Запишем ур-е (1) в матричном виде: r(u,t) = Gu*P*Gt
где P - матрица исходных данных, а векторы Gu и Gt имеют следующий вид:
Аналогичным образом определяется последняя составляющая этого уравнения Gt :
![]()
Подставим выражения Gu и Gt, получим:
![]()
10 Моделирование кривых и поверхностей в форме Эрмита
Пусть P1 и P4 - концевые точки сегмента кривой, а R1 и R4 - касательные в них.
Н
Рис 1.
x(t) = ax t3 + bx t2 + cx t + dx ; y(t) = ay t3 + by t2 + cy t + dy ; (1) z(t) = az t3 + bz t2 + cz t + dz ; |
r(0) = P1 = (P1x P1y P1z ); r(1) = P4 = (P4x P4y P4z ); r′(0) = R1 = (R1x R1y R1z ); (2) r′(1) = R4 = ( R4x R4y R4z ).
|
Рассмотрим реш-е задачи на прим одного ур-я. Для компакт-ти представим ур-я в векторном виде:
 (3)
(3)
где T - вектор-строка степеней параметра t, Cx - вектор-столбец коэф-тов для первого уравнения системы (1). Представим исходные данные в векторной форме:
 (4)
(4)
Для получения значений производных продифференцируем выражение x(t):
 (5)
(5)
Объединим отдельные векторные выражения формул (4) и (5) в единую систему уравнений, которые описываются одним матричным уравнением:
 (6)
(6)
где GHx - геометрическая матрица Эрмита, содержащая исходные данные для описания сегмента кривой линии. Решая выражение (6) относительно вектора Cx, получим следующий результат:
 (7)
(7)
где – MH = N-1H матрица сопряжения Эрмита, а GH - вектор Эрмита.
Подставим (7) в (3), получим x(t) = T * MH *GHx.
Аналогичным образом получим соответствующие уравнения для координат y и z, тогда 3 матричных уравнения можно записать в следующем виде:
r(t) = T * MH *GH.
Имея исходные данные, содержащиеся в GH и изменяя значения параметра T от нуля до единицы можно восстановить с заданной точностью точки сегмента.
При построении гладких поверхностей необходимо следить за поведением кривой на каждом из сегментов. Ее поведение будет зависеть от величин касательных R1 и R4.
ПОВЕРХНОСТЬ ЭРМИТА
Д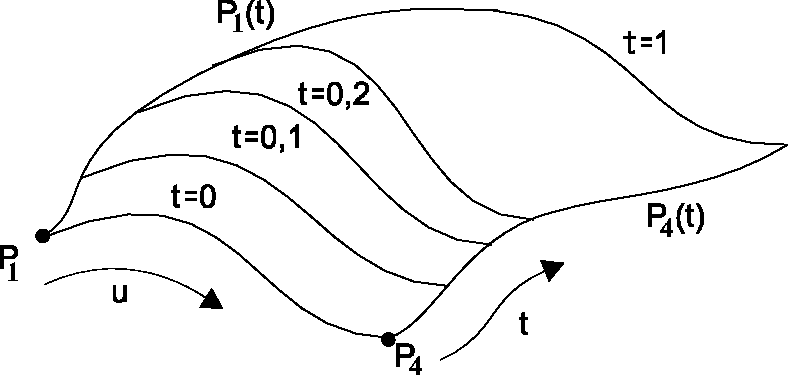 ля
моделирования сегмента трехмерной
поверхности в данной форме используются
координаты концевых (угловых) точек
сегмента и касательные векторы в них.
На основании этих исходных данных
определяется коэффициент бикубического
многочлена – aij.
Описание кривой линии в трехмерном
пространстве, в форме Эрмита определяется:
ля
моделирования сегмента трехмерной
поверхности в данной форме используются
координаты концевых (угловых) точек
сегмента и касательные векторы в них.
На основании этих исходных данных
определяется коэффициент бикубического
многочлена – aij.
Описание кривой линии в трехмерном
пространстве, в форме Эрмита определяется:
![]()
Перемещая подобную кривую во времени получим:
 (1)
(1)
Если интерполируемые линии являются прямыми, то полученная поверхность называется линейчатой. Если, кроме того, кривые P1(t) и P4(t) находятся в одной плоскости, то моделируемый сегмент будет плоским.
Представим четыре многочлена в виде одного вектора:
![]() (3)
(3)
![]()
где .
Используя тождество матричной алгебры применительно к выражению (3), получим следующие значения:

(4)
где
П![]() одставив
(4) в (1), получим:
одставив
(4) в (1), получим:
(5)
А![]() налогичным
образом получается выражение для
зависимостей у(u,t)
и z(u,t).
Таким образом, задача конструирования
поверхности в форме Эрмита заключается
в определении элементов матриц
налогичным
образом получается выражение для
зависимостей у(u,t)
и z(u,t).
Таким образом, задача конструирования
поверхности в форме Эрмита заключается
в определении элементов матриц