

38.Способы регулирования частоты вращения ад с ф.Р.
Регулирование изменением скольжения выполняют изменением сопротивления Rp регулировочного реостата в цепи ротора.
В ведение
реостата в цепь ротора изменяет
зависимость вращающего момента М от
скольжения s,
не
влияя на величину наибольшего момента.
Три характеристики M(s):
естественная (безреостатная) характеристика
1 соответствует замкнутой накоротко
обмотке ротора (сопротивление реостата
= 0), реостатные (искусственные)
характеристики 2 и 3 – введенным одной
и двум ступеням реостата.
ведение
реостата в цепь ротора изменяет
зависимость вращающего момента М от
скольжения s,
не
влияя на величину наибольшего момента.
Три характеристики M(s):
естественная (безреостатная) характеристика
1 соответствует замкнутой накоротко
обмотке ротора (сопротивление реостата
= 0), реостатные (искусственные)
характеристики 2 и 3 – введенным одной
и двум ступеням реостата.
Введение реостата в цепь ротора положительно влияет на пусковой ток, снижая его примерно в 2 раза по сравнению с короткозамкнутым АД.
Недостатки данного способа: 1) низкая экономичность из-за потерь в реостате Rp; 2) снижение жесткости механических характеристик; 3) частоту вращения можно регулировать только в сторону понижения.
39 Пуск асинхронного двигателя с фазным ротором.
П уск
в ход асинхронных двигателей существенно
отличается от условий нормальной работы.
Момент двигателя при пуске должен
превышать момент сопротивления нагрузки,
роль играет пусковой момент. Второй
важной пусковой характеристикой является
пусковой ток. Кратность пускового тока
для двигателей с короткозамкнутым
ротором достигает 5-7, что может быть
недопустимо для двигателя или для сети
и может иметь значение плавность пуска.
Пуск в ход двигателя с фазным ротором
осуществляется через 3х фазный реостат,
каждая фаза которого включена через
щётки и кольца в одну из фаз ротора. В
начале пуска реостат введён полностью,
к концу пуска он выводится и все три
фазы ротора замыкаются накоротко. Число
ступеней реостата берётся больше двух
и процесс переключений при пуске обычно
автоматизируется. Введение активных
сопротивлений в цепь фазного ротора
увеличивает момент и делает пуск плавным
и ограничивает пусковой ток. Этот способ
пуска имеет ряд достоинств, но применим
только для двигателей с фазным ротором.
уск
в ход асинхронных двигателей существенно
отличается от условий нормальной работы.
Момент двигателя при пуске должен
превышать момент сопротивления нагрузки,
роль играет пусковой момент. Второй
важной пусковой характеристикой является
пусковой ток. Кратность пускового тока
для двигателей с короткозамкнутым
ротором достигает 5-7, что может быть
недопустимо для двигателя или для сети
и может иметь значение плавность пуска.
Пуск в ход двигателя с фазным ротором
осуществляется через 3х фазный реостат,
каждая фаза которого включена через
щётки и кольца в одну из фаз ротора. В
начале пуска реостат введён полностью,
к концу пуска он выводится и все три
фазы ротора замыкаются накоротко. Число
ступеней реостата берётся больше двух
и процесс переключений при пуске обычно
автоматизируется. Введение активных
сопротивлений в цепь фазного ротора
увеличивает момент и делает пуск плавным
и ограничивает пусковой ток. Этот способ
пуска имеет ряд достоинств, но применим
только для двигателей с фазным ротором.

40.
Устройство ротора асинхронных двигателей.
Ротор выпускается как фазным, так и короткозамкнутым. Фазный ротор имеет трехфазную обмотку, выполненную подобно статорной, с тем же числом полюсов. Обмотка соединяется звездой или треугольником, три конца выводятся на три изолированных контактных кольца, вращающихся вместе с валом. Через щетки в ротор включается 3-фазный пусковой или регулировочный реостат, т.е. в каждую фазу вводится активное сопротивление. Асинхронные двигатели с фазным ротором применяются там, где требуется плавное регулирование скорости, а также при частых пусках двигателя под нагрузкой. Короткозамкнутый ротор проще, чем фазный. Отверстия вблизи наружной части каждого листа сердечника составляют продольные пазы, в которые заливается алюминий. Твердея, он образует продольные токопроводящие стержни. По обоим торцам отливаются алюминиевые кольца, замыкающие накоротко стержни. Полученная токопроводящая система называется беличьей клеткой. Двигатели с короткозамкнутым ротором наиболее просты, надежны и дешевы и наиболее распространены.
Пуск в ход асинхронных двигателей.
Пуск в ход асинхронных двигателей существенно отличается от условий нормальной работы. Момент двигателя при пуске должен превышать момент сопротивления нагрузки, роль играет пусковой момент. Второй важной пусковой характеристикой является пусковой ток. Кратность пускового тока для двигателей с короткозамкнутым ротором достигает 5-7, что может быть недопустимо для двигателя или для сети и может иметь значение плавность пуска.
Пуск в ход двигателя с фазным ротором осуществляется через 3х фазный реостат, каждая фаза которого включена через щётки и кольца в одну из фаз ротора. В начале пуска реостат введён полностью, к концу пуска он выводится и все три фазы ротора замыкаются накоротко. Число ступеней реостата берётся больше двух и процесс переключений при пуске обычно автоматизируется. Введение активных сопротивлений в цепь фазного ротора увеличивает момент и делает пуск плавным и ограничивает пусковой ток. Этот способ пуска имеет ряд достоинств, но применим только для двигателей с фазным ротором.
В короткозамкнутый ротор ввести сопротивления невозможно, поэтому пусковая характеристика неизменна в течении всего времени пуска. Наиболее распространён пуск непосредственным включением двигателя в сеть без каких-либо
Рис. 39. Включение реостата в цепь фазного ротора.
устройств, понижающих пусковой ток. Применяется в случаях, когда не требуется плавность пуска и мощность двигателя невелика в сравнении с мощностью сети. В случаях, когда мощность двигателя соизмерима с мощностью питающей сети, применяются различные схемы понижения напряжения, подводимого к двигателю при пуске, за счёт чего уменьшается пусковой ток. Понижение напряжения при пуске вызывает нежелательное уменьшение пускового момента.
Автотрансформаторный пуск.
Рубильник включается после
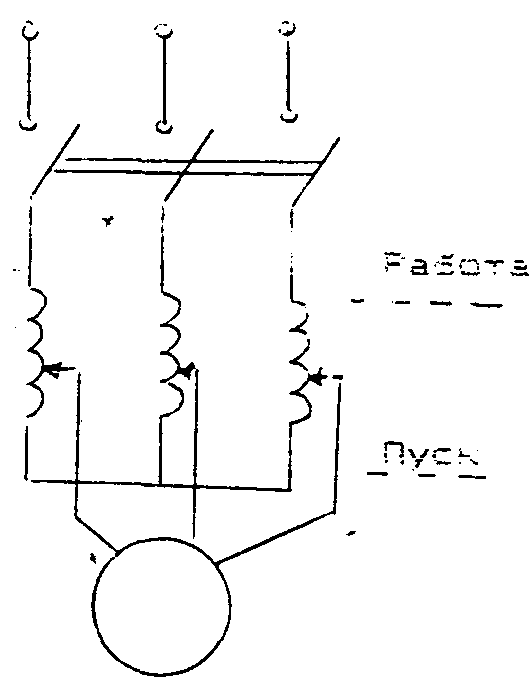
Рис. 40. Схема автотрансформаторного пуска асинхронного двигателя.
переключения автотрансформатора в положение «Пуск» - на двигатель подаётся вначале пониженное напряжение: U ≈ (1/kа) Uc , где Uc - напряжение сети, ka - коэффициент трансформации автотрансформатора. Тогда пусковой ток в сети:
Ic = (1/ka) Iд = (Uд/zд) (1/kа) = (Uc/zд) (1/kа2),
где Iд - пусковой ток двигателя, zд - полное сопротивление двигателя.
Ток в сети при пуске снижается в сравнении с током при пуске непосредственным включением в сеть в kа2 раз. По мере разгона двигателя переключатель переводится в положение «Работа». Недостатком метода является резкое снижение пускового момента в kа2 раз. Другой недостаток - необходимость наличия громоздкого автотрансформатора.
Пуск АД по схеме переключения статора со звезды на треугольник.
Вышеуказанный недостаток устраняется при пуске двигателя по схеме переключения его со звезды на треугольник. Эта схема применима в том случае, когда при нормальной работе двигателя обмотка статора включается треугольником. Рубильник включается когда

“1”
“2”
Рис. 41. Пуск АД по схеме переключения его со звезды на треугольник.
переключатель стоит в положении «1» и обмотка двигателя соединена звездой. При скольжении s = 0,5 - 0,6 переключатель переводится в положение «2», тогда обмотка двигателя соединяется треугольником. При звезде (з) пусковой ток: Iп = Uд/zд = Uс/√3 zд , где Uс - линейное напряжение сети, Uд - фазное напряжение двигателя при соединении звездой, zд - сопротивление фазы двигателя.
Если бы двигатель включался при установке переключателя в положении «2», то: Iп = Uд/zд = Uс/zд .
Данная схема даёт трёхкратное уменьшение пускового тока в сети.
Реверсирование и регулирование скорости АД.
Реверсирование, т.е. изменение направления вращения достигается изменением мест двух любых проводов, т.к. при этом порядок чередования токов в фазах меняется на обратный. При реверсировании на ходу вначале происходит торможение до остановки, затем разгон в другом направлении. Это называется противовключением. Существует ещё генераторное и динамическое торможение.
При необходимости регулирования скорости возможности определяются соотношением: n = 60 f (1 - s) / p, где f - частота, s - скольжение, p - число пар полюсов.
1. Регулирование изменением числа пар полюсов возможно только для двигателей спец исполнения, где обмотки статора выполняются так, чтобы изменяя схему их соединения, можно было получать р=1; 2; 3; ... . Эти двигатели называются многоскоростными. Регулирование ступенчатое, т.к.
nо = 3000, 1500, 1000, ... об/мин. Габариты и стоимость возрастают. Этот способ применяется только для двигателей с короткозамкнутым ротором.
41. Для каждого асинхронного двигателя может быть определен номинальный режим, т. е. режим длительной работы, при котором двигатель не перегревается сверх установленной температуры. Момент Мном, соответствующий номинальному режиму, называется. номинальным моментом. Соответствующее ему номинальное скольжение составляет для асинхронных двигателей средней мощности sH0M = 0,02...0,06, т.е. номинальная скорость nиом находится в пределах
nном = n0(1 - s0)= (0,94...0,98) п0.
Отношение максимального момента к номинальному км = = Mmах/Mном называется перегрузочной способностью асинхронного двигателя. Обычно кт = 1,8.. .2,5.
При пуске в ход, т. е. при трогании с места и при разгоне, асинхронный двигатель находится в условиях, существенно отличающихся от условий нормальной работы. Момент, развиваемый двигателем, должен превышать момент сопротивления нагрузки, иначе двигатель не сможет разгоняться. Таким образом, с точки зрения пуска двигателя важную роль играет его пусковой момент.
Отношение пускового момента Мп развиваемого двигателем в неподвижном состоянии, т. е. при n = 0, к номинальному моменту kп= Мп/Мном называется кратностью пускового момента.
Максимальный момент Мтах называется критическим моментом асинхронной машины. Работа машины с моментом, превышающим номинальный, возможна лишь кратковременно, в противном случае срок службы машины сокращается из-за ее перегрева.
В результате взаимодействия вращающегося магнитного потока с токами, индуктированными им в проводниках роторной обмотки, возникают силы, действующие на эти проводники в тангенциальном направлении. Найдем значение момента, создаваемого этими силами на валу машины.
Электромагнитная мощность, передаваемая ротору вращающимся магнитным полем, ровна:

где Мэм - электромагнитный момент действующий на ротор.
В
соответствии со схемой замещения одной
фазы машины:

Из
этих выражений найдем:

Учитывая действующий ток ротора, ЭДС, индуктивное сопротивление получим:

Введем
постоянную
 и пренебрегая моментом трения, представим
выражение момента на валу в виде:
и пренебрегая моментом трения, представим
выражение момента на валу в виде:

Если магнитный поток Ф выражен в веберах, ток I2 — в амперах, то вращающий момент получится в ньютон-метрах (Нм).
Вращающий
момент машины зависит от изменяющихся
при нагрузке ф,
I2
и
 ,
но его можно представить в виде функции
одной
переменной. В
качестве такой переменной для асинхронного
двигателя наиболее удобно выбрать
скольжение
s.
,
но его можно представить в виде функции
одной
переменной. В
качестве такой переменной для асинхронного
двигателя наиболее удобно выбрать
скольжение
s.

![]()
![]() огда
огда
П![]() олагая,
что частота сети неизменна введем
олагая,
что частота сети неизменна введем
Получим следующее выражение для вращающего момента:
43. Устройство синхронного двигателя.
Основными частями статора являются неподвижный пакет магнитопровода и трехфазная обмотка. Пакет магнитопровода изготовлен в виде полого цилиндра, набранного, так же как и магнитопровод трансформатора, из тонких листов электротехнической стали. Листы имеют форму колец с пазами, симметрично расположенными вдоль внутренней окружности. В пазы пакета статора уложены стороны многовитковых мягких катушек, образующих три фазы обмотки. Пакет статора с обмоткой запрессован в алюминиевый или чугунный корпус-оболочку, неподвижно закрепляемый при установке машины на фундаментной плите. С корпусом прочно соединены два боковых литых щита со сквозными центральными отверстиями для подшипников, в которых вращается вал ротора.
Начала и концы фаз обмотки статора присоединены к зажимам, расположенным в коробке выводов, укрепленной на корпусе. Большинство машин имеет коробку выводов с шестью зажимами, что позволяетсоединять фазы обмотки треугольником или звездой.
Применяются два типа роторов синхронных машин — неявнополюсный, или с неявно выраженными полюсами, и ротор явнополюсный, или с явно выраженными полюсами. В первом случае сердечник ротора представляет массивное цилиндрическое тело из стали (бочка ротора), вдоль его поверхности выфрезерованы пазы, в которых закладывается обмотка возбуждения. Пазы и обмотка возбуждения размещаются так, чтобы получить по возможности синусоидальное распределение индукции в зазоре между сердечниками ротора и статора. Общий вид неявнополюсного ротора показан на рис.
Явнополюсный ротор состоит из массивного стального колеса, посаженного на вал. К его ободу по внешней поверхности крепятся стальные сердечники полюсов. Последние, а иногда и обод выполняются из листовой стали. Для малых машин и при не слишком большом числе полюсов вместо колеса на вал насаживается стальная втулка, к которой крепятся полюса. Обмотка возбуждения в виде катушек размещается на сердечниках полюсов. Такая конструкция ротора позволяет разместить на нем большое число полюсов, что необходимо для машин с небольшой скоростью вращения.

44. Регулирование реактивной мощности синхронного двигателя осуществляется изменением тока возбуждения Iв
1) Номинальный режим Iв= Iв ном. cosφ=1.
2) Iв< Iв ном cos φ<1
реактивная составляющая увеличивается, носит индуктивный характер-режим работы АСД
3) Iв> Iв ном cos φ<1
ток якоря увеличивается ,Емкостной характер
При этом способе реактивная мощность отдается в сеть ,что является большим плюсом.
Изменяя ток возбуждения меняем ток якоря.

45.
Регулирование
активной мощности синхронного двигателя
осуществляется изменением угла
согласования. При увеличении нагрузки
угол увеличивается, при уменьшении-
уменьшается. Угол рассогласования
определяет
перегрузочную способность двигателя.

Отношение максимального момента к номинальному:

46. Устройство и принцип действия двигателя постоянного тока Двигатель постоянного тока состоит из неподвижной части -статора и вращающейся части - якоря, разделенных воздушным зазором. К внутренней поверхности статора крепятся главные в добавочные полюсы. Главные полюсы с обмотками возбуждения служат для создания в машине основного магнитного потока Ф, а добавочные - для уменьшение искрения.
Якорь состоит из вала, сердечника, обмотки и коллектора. Коллектор содержит изолированные друг от друга медные пластины, которые соединяются с секциями обмотки якоря. На коллектор накладываются неподвижные щётки; соединяющие обмотку якоря с внешней электрической цепью. В результата взаимодействия тока якоря Iя И магнитного потока Ф создается вращающий момент, М=СмФIя , где См- постоянная момента, зависящая от конструктивных данных машины. Вращающий момент М, двигателя уравновешивается моментом сопротивления Мс рабочей машины. При вращении якоря с частотой n его обмотка пересекает магнитный поток Ф и в ней, согласно закону электромагнитной индукции, наводится противо-ЭДС E =СеФп , где Се _ конструктивная постоянная.
Напряжение на эажимаx якоря U равно сумме ЭДС и падения напряжения на сопротивлении якорной цепи U=E +RяIя=CеФn, откуда ток якоря Iя=(U-CеФn)/Rя, а частота вращения n=(U- RяIя)/ CеФ/
В зависимости от способа питания обмотки возбуждения генераторы постоянного тока бывают:
а) б) в) г)
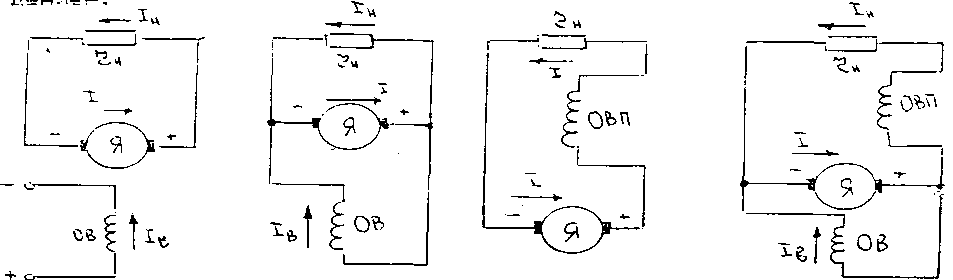
Рис. 50. Возбуждение генератора: а - независимое, б - параллельное, в - последовательное, г - смешанное.
При независимом возбуждении ОВ питается от постороннего источника. Применяется в случаях, когда необходимо в широких пределах регулировать ток возбуждения Iв и напряжение U на зажимах машины. Ток якоря равен току нагрузки Iя = Iн (рис. 50, а)
Генераторы с самовозбуждением имеют ОВ, питаемые от самого генератора.
При включении ОВ параллельно с обмоткой якоря имеем генератор с параллельным возбуждением (рис. 50, б), у которого Iя = Iн + Iв. У мощных машин нормального исполнения Iв обычно составляет 1-3%, а у малых машин - до нескольких десятков % от тока якоря. У генератора с последовательным возбуждением (рис. 50, в) ОВП включён последовательно с якорем, т.е.
Iя = Iн = Iв.
Генераторы со смешанным возбуждением имеют две обмотки возбуждения, ОВ включёна параллельно якорю, а другая ОВП - последователь но (рис. 50, г). Основной обычно является ОВ. ОВП подмагничивает машину при увеличении тока нагрузки, чем компенсируется падение напряжения U в обмотке якоря и размагничивающее влияние реакции якоря.


47. Подадим на зажимы неподвижного якоря напряжение. Напряжение вызовет ток в цепи якоря. При этом возникает электромагнитным момент. Этот момент начнёт вращать якорь, совершая механическую работу. Машина начнет работать в режиме электродвигателя. Чтобы преодолеть сопротивление механической нагрузки на валу, электродвигателя должен потреблять энергию из внешнего источника.