

Лекция 2 Математические модели систем автоматического регулирования
Математические модели описывают связи между входными и выходными сигналами элементов САР:
![]()
y(t) = F(x(t))
В теории автоматического регулирования используют следующие виды моделей:
Дифференциальные уравнения:
![]() (1).
(1).
Все производные берутся по времени t.
Дано: 1) x = x(t);
2) начальные условия: y|t=0=y0; y'|t=0=y'0; …; y(n-1)|t=0 = y'0.
Требуется найти y(t).
Передаточные функции
Частотные характеристики
Переходные характеристики
Передаточные функции (ПФ)
Передаточные функции основаны на преобразовании Лапласа.
Пусть задана
функция ![]() ,
которая удовлетворяет двум условиям:
,
которая удовлетворяет двум условиям:
1) f(t)≡0 при t< 0;
2) можно подобрать
две константы “M” и “с” такие, что при
![]() функция
удовлетворяет условию
функция
удовлетворяет условию ![]()
Функция, удовлетворяющая условиям Дирихле, называется оригиналом.
Для любого оригинала существует несобственный интеграл:
F(p) =
![]() , (2)
, (2)
Функция F(p) называется изображением по Лапласу оригинала f(t).
Связь оригинала с изображением обозначают:
f(t)![]() F(p).
F(p).
Имеются подробные таблицы соответствия оригиналов и изображений. Приведем некоторые соответствия:
1(t) 1/p (1(t)≡0 при t<0 и ≡1 при t≥1) ;
tn
n!/pn+1(n![]() N);
N);
е–αt 1/(p+α);
sin ωt ω/(p2+ω2);
cos ωt p/(p2+ω2).
В теории преобразования Лапласа имеются теоремы:
1) Если f(t) F(p) и φ(t) ф(p),
то f(t)+ φ(t) F(p)+ ф(p).
Если f(t) F(p), то
cf(t) cF(p).
3) Теорема о дифференцировании оригинала:
Если f(t) F(p), то f'(t) pF(p)–f(0) (3)
Если, в частности, f(0) = 0, то
f'(t) pF(p). (4)
Применяя эту теорему и полагая, что все начальные условия нулевые
f'(0) = … = f(n-1)(0) = 0,
получим : f ''(t) p2F(p),
………………., (5) f(n)(t) pnF(p).
Используя выражения (5) и предполагая, что уравнение (1) имеет нулевые начальные условия, преобразуем (1) к алгебраическому уравнению относительно изображений по Лапласу Y(p) и X(p):
(anpn + an-1pn-1 + … + a1p + + a0)Y(p) = (bmpm + … + b1p + b0)X(p);
Y(p) = (bmpm + … + b1p + b0)/ (anpn + an-1pn-1 + … + a1p + a0) *X(p) (6)
Отношение изображения по Лапласу выходного сигнала y(t) к изображению по Лапласу входного сигнала x(t) при нулевых начальных условиях
W(p) = Y(p)/X(p) (7)
называется передаточной функцией соответствующего звена (элемента) .
Из выражения (6) получаем связь передаточной функции с коэффициентами дифференциального уравнения (1):
W(p)= (bmpm + … + b1p + b0)/ (anpn + an-1pn-1 + … + a1p + a0) (8)
--------------------6 билет-------------------------
Структурные схемы САР и правила преобразования структурных схем
Структурной схемой САР называется такая схема, все элементы которой представлены своими передаточными функциями.
Структурные схемы можно преобразовывать с целью приведения к простейшему (каноническому) виду. Для этого используются следующие правила:
1) последовательное соединение элементов системы, где W(p) = W1(p)·W2(p)

2) параллельное соединение элементов, где W(p) = W1(p) + W2(p).

3) Антипараллельное соединение с отрицательной обратной связью


Y(p) = W1(p)·ε(p) = W1(p)·[X0(p) – Xос(p)] = W1(p)·[X0(p) – W2(p)·Y(p)],
тогда (1 + W1(p)·W2(p))·Y(p) = W1(p)·X0(p); Y(p) = X0(p) · W1 / (1 + W1·W2), отсюда эквивалентная передаточная функция
W(p) = W1(p) / (1 + W1(p)·W2(p))
Замечание: если обратная связь будет положительной, то знак в знаменателе будет заменен на «–».
4) Перенос звена через узел разветвления вперед (по ходу сигнала) – рисунок слева.
5) Перенос звена через узел разветвления назад – второй слева рисунок.
6) Перенос звена через узел суммирования вперед – третий рисунок.
7) Перенос звена через узел суммирования назад – четвертый рисунок.




--------------------11 билет------------------------
Передаточные функции разомкнутой и замкнутой САР
Используя правила (1–7), cтруктурную схему любой САР можно преобразовать к следующему каноническому (простейшему) виду, изображенному на рис.5, где передаточная функция Wрс(p) = Xос(p)/ε(p).
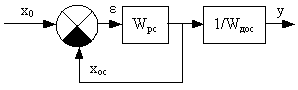
Рис.5. Каноническая структурная схема САР
Передаточная функция разомкнутой системы (ПФРС) – это отношение изображения по Лапласу сигнала обратной связи к изображению ошибки рассогласования при нулевых начальных условиях: Wрс(p) = Xос(p)/ε(p).
В общем случае ПФРС представляется как отношение двух полиномов (формула 8), где m≤n (условие физической реализуемости системы).
В зависимости от вида ПФРС различают 2 типа систем:
Если в выражении
(8)
![]() и
и
![]() ,
система называется статической,
,
система называется статической,
Если в выражении
(8)
,
![]() ,
система называется астатической,
,
система называется астатической,
Отношение изображения по Лапласу сигнала обратной связи к изображению по Лапласу задающего воздействия называется передаточной функцией замкнутой системы (ПФЗС):
Wзс(p)=Xос(p)/X0(p) = Wрс(p) / (1 + Wрс(p)). (9)
Замечание. Иногда удобно ПФЗС определять как отношение Y(p)/X0(p)=Wзс(y)(p); Wзс(y)(p)=Wзс(p)/Wдос(p), где Wдос(p) – передаточная функция датчика обратной связи.
хаpактеpистический полином – знаменатель ПФЗС (1 + Wрс(p)).
--------------------8 билет-------------------------