

Лекция № 3 –2ч.
Механизм передвижения.
План лекции.
1. Общие сведения. Схема механизмов передвижения.
2. Определение давления на ходовые колеса и их расчет.
3. Сопротивление передвижению кранов.
1. Общие сведения. Схема механизмов передвижения.
Механизмы передвижения характеризуются видом ходового оборудования, типом привода и трансмиссией, связывающей привод с ходовым оборудованием. Ходовое оборудование - рельсоколесное, пневмоколесное и гусеничное, и им определяется тип крана.
Рельсоколесные краны - мостовые, козловые, консольные настенные, велосипедные, портальные, башенные, мостовые перегружатели, ж/д краны, передвижные тали. Для рельсоколесных кранов используют два типа механизма передвижения:
- с приводными колесами;
- c канатной тягой.
Наибольшее распространение в механизмах передвижения кранов и тележек получил электропривод.
Конструктивные разновидности механизмов передвижения тележек отличаются в основном расположением вертикального редуктора (рисунок 1):
- Центральное относительно колеи тележки (рисунок 1, а).
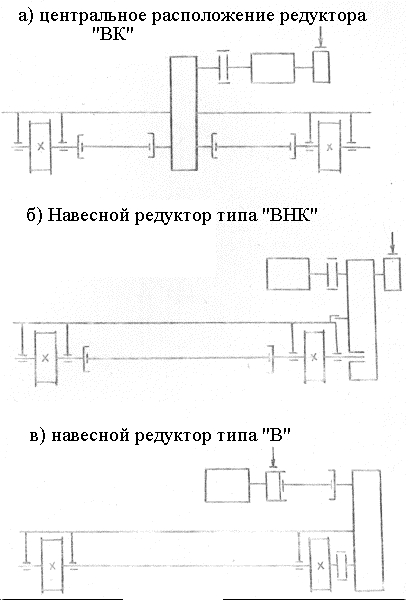
Рисунок 1. Кинематические схемы механизмов передвижения тележек мостовых кранов
- Навесной редуктор (рисунок 1, б, в). Эти схемы отличаются компактностью и простотой установки, не требует специальных опорных площадок на раме тележки под редуктор и эл./двигатель. Однако, при замене приводных колес приходится демонтировать и редуктор. Целесообразно применять для тележек малой грузоподъемности. В противном случае габаритные размеры и вес навесного редуктора непропорционально возрастает.
Схемы механизмов передвижения мостовых кранов представлены на рисунок 2, 3.
При центральном расположении привод располагается примерно в средней части моста. Вращение на приводные колеса передается через трансмиссионный вал. Различают схемы с тихоходным, среднеходным и быстроходным трансмиссионным валом (рисунок 2, а, б).
В схеме (рисунок 2, а) тихоходный трансмиссионный вал имеет ту же частоту вращения, что и ходовые колеса, и передает наибольший крутящийся момент. Поэтому вал, опоры и муфты имеют большие размеры, что вызывает утяжеление механизма. Тормоз устанавливают на муфте или на втором конце вала двигателя.
Схема со среднеходным трансмиссионным валом (рисунок 2, б) не нашла широкого применения, т.к. открытая зубчатая пара отличается малой долговечностью.
В схеме с быстроходным трансмиссионным валом (рисунок 2, в) несмотря на наличие двух редукторов механизмы при значительных пролетах получаются более легкими. Трансмиссионный вал имеет ту же частоту вращения, что и двигатель, и поэтому передает минимальный крутящийся момент. Следовательно, размеры муфт, опор и вала получаются наименьшими. Однако вследствие высокой частоты вращения трансмиссионного вала необходимо обеспечить повышенную точность его изготовления и монтажа, а также проведение соответствующей балансировки. Металлоконструкция моста в этом случае также должна иметь повышенную жесткость.
Для устранения трансмиссионного вала применяют схему механизма передвижения с раздельным приводом (рисунок 3). Исследования этих механизмов показывает, что нормальная работа кранов обеспечивается при отношении длины пролета L к его базе В не более шести. При L/В > 6 отмечается повышенная упругая деформация моста и значительные забегания одной концевой балки относительно другой. Технико-экономический расчет показывает, что раздельный привод целесообразно применять при пролетах, превышающих 16 м.
Раздельный привод устанавливается на рабочих площадках около концевых балок. Соединение вала двигателя с входным валом редуктора осуществляется с помощью промежуточных валов с зубчатыми муфтами или же с навесным редуктором и фланцевым двигателем.
Хотя схема механизма передвижения с раздельным приводом требует наличие двух двигателей, двух тормозов и двух редукторов, она получается наиболее дешевой, легкой и простой в изготовлении.
Одним из перспективных технических средств, смягчающих динамические нагрузки и повышающие производительность кранов является применение гидравлического привода в сочетании с асинхронным короткозамкнутым электродвигателем. Привод быстро разгоняется, возникающий в начале пуска колебательный процесс быстро затухает (за 0,3 с) и дальнейший разгон до выхода на естественную механическую характеристику осуществляется при постоянном пусковом моменте. Отсутствие длительного колебательного процесса в упругих кинематических звеньях механизма дает возможность рассчитывать их с меньшим запасом прочности.
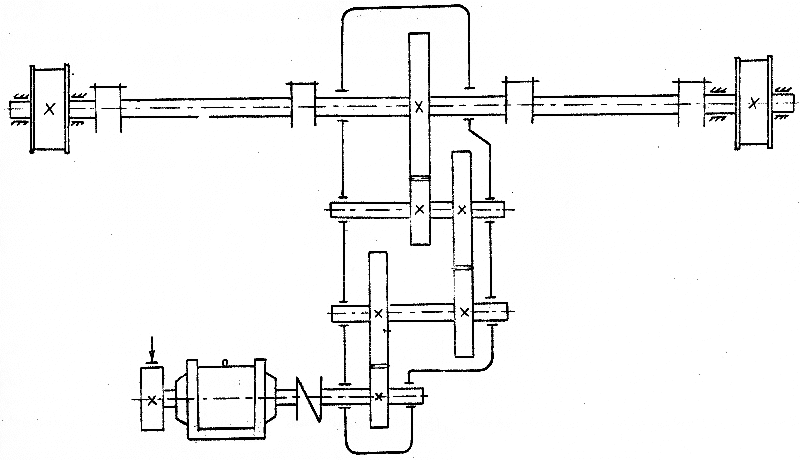
Рисунок 2а. Схема механизма передвижения крана с тихоходным трансмиссионным валом

Рисунок 2б. Схема механизма передвижения крана с быстроходным трансмиссионным валом

Рисунок 3. Схема механизма передвижения крана с раздельным приводом