

Pakhomov_A_N__Krivenkov_M_V_Elektricheskiy_privod_uchebnoe_posobie
.pdf71
при Ф → 0 ωд → ∞ .
Момент двигателя M = сM ФIя может быть равен нулю в двух случаях:
1) при Iя = 0 |
и ωд = ω0 , что соответствует работе двигателей вхолостую, и |
2) при Iя = Iя1 |
и ωд = ∞ , когда Ф = 0 . Очевидно, при увеличении скорости в |
генераторном режиме момент будет сначала возрастать (рис. 3.14, характеристика 3), при некоторой скорости достигнет наибольшего значения −M1 , а
при дальнейшем увеличении скорости начнет уменьшаться.
То, что двигатель смешанного возбуждения имеет в генераторном режиме ограниченное значение момента −M1 , затрудняет практическое исполь-
зование генераторного режима. Иногда при работе двигателя в генераторном режиме сериесную обмотку отключают. В этом случае двигатель будет иметь механическую характеристику 4 (рис. 3.14) такую же, как двигатель параллельного возбуждения.
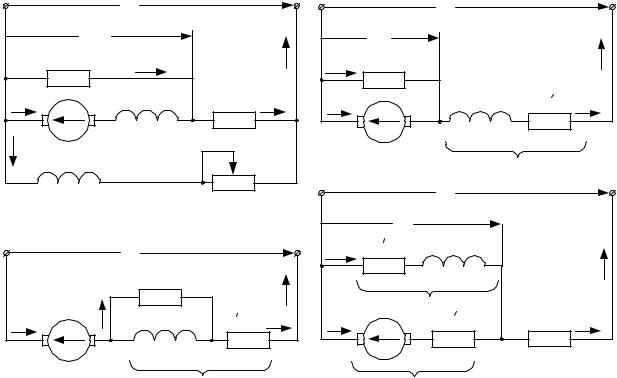
Под режимом динамического торможения двигателей постоянного тока понимают режим, при котором якорь двигателя вращается под действием постороннего момента или запаса кинетической энергии, будучи отключенным от сети контактом K1 и замкнутым на сопротивление динамического торможения Rдт (рис. 3.15, а-д).
Уравнения скоростных и механических характеристик режима динамического торможения для ДПТ параллельного возбуждения (рис. 3.15, а) можно получить из зависимостей (3.5) и (3.6), положив в них U = 0 и заменив
Rяце через Rяце + Rдт :
ω = − |
Iя( Rяце + Rдт ) |
|
; |
(3.18) |
||
сE Ф |
||||||
|
|
|
|
|||
ω = − |
M ( Rяце + Rдт ) |
. |
|
|||
|
(3.19) |
|||||
|
|
сE сМ Ф2 |
|
|||
Так как у двигателя параллельного возбуждения Ф = const , то его характеристики в режиме динамического торможения прямолинейны. Как видно из уравнений (3.18) и (3.19), при Iя = 0 и M = 0 скорость ω = 0 . Это зна-
чит, что характеристики динамического торможения проходят через начало координат (характеристика 4 на рис. 3.15, е). Большим сопротивлениям Rдт
соответствуют более мягкие характеристики 4’ и при одной и той же скорости меньшие тормозные моменты ( M 4' < M 4 ) и токи.
Режим динамического торможения применяется главным образом для остановки электропривода. Предположим, двигатель работал на естественной
характеристике 1 (рис. 3.15, е) с моментом M = M c и скоростью ωд = ωc .

72
При размыкании контакта K1 и замыкании двигателя на Rдт он переходит на
характеристику динамического торможения 4. Так как момент двигателя и статический момент направлены в этом случае против скорости, последняя начинает уменьшаться. При ωд = 0 E = сE Фωд = 0 , вследствие чего Iя = 0 и,
следовательно, M = 0 . Сопротивление динамического торможения должно быть такой величины, чтобы ток и момент двигателя не превысили допустимых значений и была обеспечена остановка электропривода в заданное время.
|
U |
|
|
|
|
|
U |
|
|
|
|
|
Iя |
Rдт |
K1 |
|
|
|
Iя |
|
Rдт |
K1 |
|
|
E |
|
E |
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
ωд |
Iв |
R вдоб |
|
ω |
|
|
Iв |
|
R |
вдоб |
|
|
|
|
д |
|
|
|
|
|
|||
|
ОВпар |
|
а |
|
ОВпар |
|
|
|
|
б |
|
|
Mд , Mс |
|
Mд, Mс |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
U |
|
|
|
|
|||
|
U |
|
|
|
|
|
|
|
|
|
|
|
Iя |
Rдт |
K1 |
|
|
Iя |
|
|
Rдт |
K1 |
|
|
E |
ωд |
E |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
ωд |
ОВпос |
Rвоз |
|
|
|
ОВпос |
|
|
|
||
Iв |
|
|
|
|
|
|
|||||
|
|
|
|
Iв |
|
|
|
|
|||
|
|
|
|
Mд, Mс |
ω |
|
|
|
г |
||
|
Mд, Mс |
|
в |
|
|
|
|
||||
|
|
|
|
4 |
|
ω03 |
|
|
|
|
|
|
U |
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Iя |
Rдт |
K1 |
|
|
|
ω01 |
ωc |
|
|
|
|
|
|
|
|
|
|
1 |
||||
|
E |
|
|
5 |
|
|
|
|
|
|
|
|
ОВпос |
Rвоз |
K2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||
|
Iв |
|
|
M4 |
|
4 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
ОВпар |
|
|
|
|
|
|
|
|
|
|
|
R вдоб |
|
M5 |
M5 |
M4 |
|
M c |
|
|
М |
|
|
Mд, Mс |
|
|
|
|
||||||
|
|
д |
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Рис. 3.15 |
|
|
|
|
|
|
|
|
Если направление статического момента изменяется при изменении направления вращения (реактивный M c ), то при ωд = 0 двигатель остановится.
При активном статическом моменте возможен разгон двигателя в обратном направлении. Однако и в этом случае двигатель будет продолжать работать в тормозном режиме, так как момент и скорость направлены в разные стороны ( M > 0 , а ωд < 0 ). Таким образом, режим динамического торможения может
быть использован не только для остановки, но и для получения определенной установившейся скорости. Величину последней можно изменять путем изменения сопротивления динамического торможения. В режиме динамического торможения ЭДС и ток якоря совпадают по направлению ( E > 0 , а Iя < 0 ),
73
поэтому машина работает в качестве источника. Вырабатываемая ею электроэнергия расходуется в сопротивлениях цепи якоря.
Двигатель последовательного возбуждения может работать в режиме динамического торможения с независимым возбуждением (рис. 3.15, в) и самовозбуждением (рис. 3.15, г).
В схеме на рис. 3.15, в обмотка возбуждения в режиме динамического торможения оказывается подключенной к сети через дополнительное сопро-
тивление Rвоз . Поэтому ток возбуждения Iв и, следовательно, магнитный по-
ток двигателя в процессе торможения остаются неизменными. Очевидно, скоростные и механические характеристики в рассматриваемом случае не отличаются от соответствующих характеристик двигателя параллельного возбуждения (характеристики 4 и 4’ на рис. 3.15, е) и подчиняются уравнениям
(3.18) и (3.19).
Величина сE Ф , входящая в уравнения (3.18) и (3.19), определяется из уравнения (3.5), если в него подставить ток Iя = Iв и соответствующую ему на естественной характеристике двигателя скорость ωe . Дополнительное сопротивление Rвоз обычно выбирают так, чтобы ток возбуждения был равен номинальному току двигателя, т. е. Iв = Iн . К недостаткам динамического
торможения с независимым возбуждением следует отнести значительные потери мощности в сопротивлении Rвоз .
В схеме на рис. 3.15, г якорь и обмотка возбуждения двигателя при динамическом торможении соединяются последовательно. Они должны быть соединены так, чтобы ток через обмотку возбуждения протекал в ту же сторону, в которую он протекал в двигательном режиме, в противном случае двигатель будет размагничен.
При работе двигателя в режиме динамического торможения с самовозбуждением ток и момент двигателя (характеристика 5 на рис. 3.15, е) уменьшаются значительно быстрее, чем при независимом возбуждении, что объясняется снижением магнитного потока в процессе торможения. В результате этого торможение с самовозбуждением оказывается менее интенсивным при тех же условиях. Скоростные характеристики при динамическом торможении с самовозбуждением могут быть построены по уравнению (3.18). Следует только учесть, что величина cE Ф в данном случае должна определяться по
уравнению (3.5) и естественной характеристике двигателя для каждого значения тока.
Для определения моментов двигателя при различных токах и перехода к механической характеристике можно воспользоваться формулой (3.1).
Поскольку при торможении с самовозбуждением по обмоткам якоря и возбуждения протекает один и тот же ток, для перехода от скоростных характеристик к механическим можно воспользоваться зависимостью M ( Iя ) дви-
гателя.
74
Преимущества динамического торможения с самовозбуждением заключаются в том, что при торможении энергия из сети не потребляется и торможение возможно даже в случае перерыва в электроснабжении установки. Поэтому такой вид торможения применяется также для ДПТ параллельного возбуждения в аварийных режимах при потере напряжения в сети. В этом случае его обмотка возбуждения подключается к якорю двигателя, с сохранением прежнего направления тока возбуждения (рис. 3.15, б). Механические характеристики ДПТ параллельного возбуждения в режиме динамического торможения с самовозбуждением аналогичны характеристикам 5 и 5’ ДПТ последовательного возбуждения (рис. 3.15, е).
При динамическом торможении двигателя смешанного возбуждения применяются две схемы (рис. 3.15, д): схема, в которой магнитный поток двигателя создается только обмоткой параллельного возбуждения (ключ K2 разомкнут), и схема, в которой магнитный поток создается обеими обмотками (ключ K2 замкнут). Магнитный поток при включении двигателя по обеим схемам остается в процессе торможения неизменным, поэтому скоростные и механические характеристики не отличаются от соответствующих характеристик двигателя параллельного возбуждения. При включении двигателя по второй схеме из-за большого момента торможение получается более интенсивным. Однако эта схема является более сложной, и ее следует применять лишь в случаях, когда первая схема не дает желаемых результатов в отношении времени торможения. Сопротивление Rвоз выбирают обычно так, чтобы
ток обмотки последовательного возбуждения в режиме динамического торможения был равен номинальному току двигателя.
Сравнительный анализ видов торможения ДПТ. Из приведенных выше тормозных режимов ДПТ наиболее простым и экономичным является рекуперативное торможение. Для его обеспечения нет необходимости изменять схему включения ДПТ и вводить какие-либо сопротивления. Кроме того, в этом режиме происходит возврат энергии в сеть. Однако, с помощью рекуперативного торможения невозможно остановить привод ( ω > ω0 ). Торможе-
ние противовключением возможно при любой скорости, вплоть до полной остановки привода. Оаноко, и этому способу присущи недостатки – возможность самопроизвольного реверса, значительные потери энергии в добавочном сопротивлении и большая крутизна механических характеристик. Динамическое торможение с независимым возбуждением – надежный и простой способ торможения до полной остановки привода, но «тормозной эффект» снижается при уменьшении скорости. И наконец динамическое торможение с самовозбуждением зарекомендовало себя как аварийный способ торможения при отсутствии питающего напряжения. Снижение эффективности динамического торможения при уменьшении скорости компенсируется применением других способов торможения, например, с помощью механического тормоза.
Приведенный сравнительный анализ видов торможения ДПТ справедлив и для двигателей переменного тока (см. разд. 4.6).
75
3.6. Потенциометрические схемы включения двигателей
Рассмотренные ранее обычные схемы включения двигателей постоянного тока не позволяют получить достаточно жестких механических характеристик при пониженных скоростях ни в двигательном, ни в тормозных режимах работы, что является их недостатком. Для получения более жестких механических характеристик при пониженных скоростях в двигательном и тормозных режимах иногда применяют потенциометрические схемы включения двигателей [1-3].
|
|
U |
|
|
|
|
U |
|
|
|
|
Uд |
|
|
|
|
Uд |
|
|
|
|
|
Rш |
Iш |
|
I |
I |
Rш |
|
|
I |
|
|
|
|
|
|
ш |
|
|
|
|
|
Iя |
E |
ОВпос |
R п |
Iп |
Iя |
E |
ОВпос |
R п |
Iп |
|
|
|
|
|
|
|
|
|
|||
Iв |
Rяц |
Rовпос |
|
|
|
Rяц |
Rовпос |
|
|
|
ОВпар |
|
R вдоб |
|
|
б |
Rп |
|
|||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
Rовпар |
|
|
|
|
|
U |
|
|
|
|
|
а |
|
|
|
Uд |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
U |
|
|
I |
Rш |
ОВпос |
|
|
|
|
|
|
|
ш |
|
|
|
I |
||
|
|
Rш |
|
|
|
|
Rовпос |
|
||
|
|
|
I |
|
|
|
|
|||
|
Iш |
|
|
|
Rш |
|
|
|||
|
ОВпос |
R п |
Iп |
Iя |
|
|
||||
Iя |
|
Rя |
R п |
Iп |
||||||
E |
E |
|||||||||
|
|
|
|
|
|
|
|
|||
Rяц |
R овпос |
Rяц |
|
в |
Rп |
R я |
г |
|
|
Рис. 3.16 |
|
На рис. 3.16, а изображена потенциометрическая схема включения двигателя смешанного возбуждения. Как видно, обмотка параллельного возбуждения двигателя подключена к полному напряжению сети постоянного тока. Особенность схемы состоит в том, что якорь двигателя и соединенная последовательно с ним сериесная обмотка подключены к одному из сопротивлений потенциометра (делителя напряжения), состоящего из сопротивлений Rш и
Rп . Благодаря этому напряжение цепи якоря Uд оказывается меньше напря-
жения сети U , что приводит к снижению скорости двигателя.
Имея схему включения двигателя смешанного возбуждения, нетрудно представить, как выглядят потенциометрические схемы включения двух других двигателей. Если мысленно исключить обмотку ОВпос, получим потенциометрическую схему включения двигателя параллельного возбуждения.
76
Исключив обмотку ОВпар, получим схему включения двигателя последовательного возбуждения.
Свойства и характеристики двигателей параллельного, последовательного и смешанного возбуждения различны, что объясняется разным характером изменения их магнитного потока при изменении нагрузки. Свойства и характеристики двигателей последовательного и смешанного возбуждения можно изменять, включая сериесную обмотку в различные цепи схемы. Так, сериесная обмотка может включаться последовательно с сопротивлением Rп
(рис. 3.16, б), параллельно (рис. 3.16, в) и последовательно с сопротивлением Rш (рис. 3.16, г). Регулирование скорости при потенциометрическом включе-
нии двигателей осуществляется путем изменения сопротивлений Rш и Rп .
Уравнение искусственных скоростных характеристик двигателей параллельного, последовательного и смешанного возбуждения при потенциометрическом включении может быть получено путем совместного решения следующих уравнений, составленных на основании законов Кирхгофа:
E = cE Фωд = −IяRя + IшRш ; |
(3.20) |
0 = Iш Rш + IпRп − U ; |
(3.21) |
Iп = Iя + Iш . |
(3.22) |
Уравнение искусственных скоростных характеристик имеет вид
|
U |
|
Rш |
|
Iя |
|
RшRп |
|
|
|
w = |
× |
- |
Rя + |
. |
(3.23) |
|||||
cE Ф |
Rш + Rп |
|
|
|||||||
|
|
|
cE Ф |
Rш + Rп |
|
|||||
После замены в уравнении (3.23) тока якоря получим уравнение искусственных механических характеристик двигателей
|
U |
|
Rш |
|
M |
|
RшRп |
|
|
|
w = |
× |
- |
Rя + |
. |
(3.24) |
|||||
cE Ф |
Rш + Rп |
cE cМ Ф2 |
|
|||||||
|
|
|
|
Rш + Rп |
|
|||||
У двигателя параллельного возбуждения при потенциометрическом включении магнитный поток не зависит от нагрузки двигателя. Поскольку при изменении нагрузки Ф = const , то скоростные w( Iя ) и механические
w(M ) характеристики двигателя параллельного возбуждения при различных сопротивлениях Rш и Rп будут прямолинейными. Первый член уравнения
77
(3.23) при Iя = 0 или уравнения (3.24) при M = 0 представляет собой скорость холостого хода, которую можно выразить также следующим образом:
|
|
|
ω = |
Uд1 |
, |
|
|
|
|
|
|||
|
|
|
01 |
cE Ф |
|
|
|
|
|
|
|
||
где Uд1 = U |
Rш |
– |
напряжение цепи якоря при холостом ходе. |
|||
Rш + Rп |
||||||
|
|
|
|
|
||
Поскольку у двигателя параллельного возбуждения Ф = const , то при изменении сопротивлений Rш и Rп скорость ω01 будет меняться лишь при
изменении напряжения Uд1 . Как видно, при уменьшении Rш или увеличении Rп напряжение Uд1 , а значит, и скорость ω01 будут уменьшаться.
Из уравнения (3.23) следует, что изменение скорости при нагрузке двигателя параллельного возбуждения и, следовательно, жесткость скоростных и механических характеристик зависят от изменения падения напряжения в со-
противлении R = R + |
|
RшRп |
. При увеличении сопротивления R тот же ток |
|||
|
|
|
||||
э |
я |
Rш + Rп |
э |
|||
|
|
|
||||
Iя будет вызывать большее падение напряжения, в результате чего характе- |
||||||
ристики будут менее жесткими. |
|
|||||
Поскольку |
RшRп |
|
> 0 , то R > R и механические характеристики при |
|||
|
|
|
||||
|
|
|
|
|
э |
я |
|
Rш + Rп |
|
||||
потенциометрическом включении оказываются мягче естественной характе-
ристики двигателя. Однако |
RшRп |
< R , поэтому R < (R + R |
) и механиче- |
||
|
|||||
|
|
п |
э |
я п |
|
|
Rш + Rп |
|
|
|
|
ские характеристики получаются более жесткими, чем в обычной схеме, в цепь якоря которой включено сопротивление, равное Rп . При увеличении Rп
или R |
величина |
RшRп |
, а значит, и сопротивление R |
возрастают; харак- |
|
||||
ш |
|
э |
||
|
|
Rш + Rп |
|
|
теристики при больших значениях Rш или Rп становятся более мягкими.
Для сохранения неизменной скорости холостого хода и получения более жестких характеристик необходимо уменьшать величину Rш и Rп так,
чтобы их отношение оставалось постоянным. Когда Rп = 0 (рис. 3.17, а),
якорь оказывается подключенным непосредственно к сети и, очевидно, его механическая характеристика 0 не отличается от естественной. Случай, когда Rп = ∞ , соответствует отключению якоря от сети. При этом двигатель работа-
ет в режиме динамического торможения и имеет характеристику 1. Координаты точки А пересечения характеристик 0 и 1 зависят от величины сопро-

|
|
|
|
|
|
|
|
|
|
78 |
|
|
|
|
|
тивления Rш . Механические характеристики |
при |
других |
значениях |
Rп |
и |
||||||||||
Rш = const проходят также через точку А. |
|
|
|
|
|
||||||||||
0 |
1 |
|
|
γп |
ω |
|
|
|
|
ω |
|
|
|
|
|
А |
|
|
|
ωс Rш= ∞ |
|
|
Rп= 0 |
|
|
||||||
|
|
|
|
|
|
ω0 Rп=0 |
|
|
|
|
|||||
|
|
R |
|
|
|
|
R |
|
|
|
|
|
Rш= ∞ |
|
|
|
|
п |
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
> |
|
|
|
|
|
|
|
||
|
|
|
∞ |
|
|
ω01 |
0 |
ω |
|
|
|
|
|
||
|
|
|
R |
|
|
|
Rп1> 0 |
|
|
||||||
|
|
|
ш> |
|
|
|
|
|
|
||||||
2 |
|
|
|
|
0 |
|
|
|
|
с1 |
|
|
|
|
|
|
Rш=0 Rп>0 |
|
|
|
|
γш |
|
|
|
|
|||||
|
|
|
Мс |
|
|
|
Rш= ∞ |
|
|
||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
Rп1> 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rш1> 0 Rп1> 0 |
|
|
|
|
|
|
IА= U |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
U |
В М |
|
|
Rш2<Rш1 |
|
||||
|
|
|
|
Rш |
|
IВ= Rш |
|
|
Rп2>Rп1 |
М |
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
ω |
|
|
|
|
|
|
а |
|
Rш= ∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rп = ∞ |
|
|
|
|
|
|
|
|
Rп= 0 |
|
|
|
|
|
Rп = ∞ |
Rш2<Rш1 |
|
||
|
|
|
|
|
|
|
|
|
|
Rш1> 0 |
|
|
|
||
|
|
|
|
|
Rш= ∞ |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Rп1> 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rш= ∞ |
|
|
|
|
Iп |
|
б |
|
|
|
|
|
|
|
|
|
Rп1> 0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Rш1> 0 Rп= 0 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Rш2 >Rш1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Rп1> 0 |
|
|
− U |
|
|
|
||
|
|
|
|
|
|
|
Rш2 >Rш1 R |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
п2>Rп1 |
|
Rш |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
>Rш1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rш2 |
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
Rш+Rп |
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
||
|
|
|
Rп1> 0 |
|
|
|
|
|
Iя |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Rш1> 0 |
Rп1> 0 |
|
|
|
|
|
|
г |
|
|||
|
|
|
R |
|
> Rя1 |
|
|
|
|
Iш |
|
|
|
||
|
|
|
|
я2 |
|
Rш2 >R ш1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
Rя1 > 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rп1> 0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Rш1> 0 |
Rп= 0 |
|
|
U |
|
|
||
|
|
|
|
|
|
|
Rя1 > 0 |
|
|
|
|
||||
|
Rп1> 0 |
|
|
|
|
|
|
|
R ш1> 0 |
|
|
R п |
|
|
|
|
Rш1> 0 |
|
|
|
|
|
|
|
R я1 > 0 |
U |
|
|
|
|
|
|
Rя1 |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rш+Rп |
|
|
|
|
|
|
Rп1> 0 |
|
|
|
|
|
М |
|
|
|
||||
|
|
|
|
|
|
|
|
|
Iя |
|
|||||
|
|
Rш1= 0 |
|
|
|
|
|
|
|
|
|
||||
|
|
Rя1 |
> 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 3.17
Когда Rш = ∞ схема, изображенная на рис. 3.16, а не отличается от схе-
мы включения двигателя, в которой последовательно с якорем включено сопротивление Rп . Если Rш = 0 , якорь двигателя оказывается замкнутым нако-
ротко. В этом случае ток якоря определяется исключительно ЭДС и сопротивлением якоря, что соответствует режиму динамического торможения при Rд = 0 . Механическая характеристика 2 при Rш = 0 параллельна естественной
79
характеристике. Координаты точки Б пересечения характеристик 1 и 2 определяются величиной сопротивления Rп . Характеристики при других сопро-
тивлениях Rш и Rп = const также проходят через точку Б.
Как видно из рис. 3.17, а, двигатель может работать при потенциометрическом включении во всех рассмотренных выше режимах. В двигательном режиме оказывается возможным получить достаточно жесткие механические характеристики при малых скоростях, а в генераторном режиме скорости меньше, чем ω0 . При потенциометрическом включении двигатель оказывает-
ся в генераторном режиме при скоростях ω > ω01 , где ω01 – скорость холосто-
го хода на соответствующей характеристике при потенциометрическом включении. Однако электрическая энергия начинает поступать в сеть при
|
|
|
|
|
I R |
|
|
|
|
|
|
|
|
||||
скоростях ω > |
ω0 |
+ |
|
|
я я |
|
|
, когда Uд > U . |
|
|
|||||||
|
|
|
|
|
||||
|
|
|
|
|
cE Ф |
|||
Переход от высшей скорости ωс к низшей ωс1 (см. рис. 3.17, а) осуще-
ствляется так. При подключении к потенциометру двигатель переходит на характеристику 1 в генераторный режим, в котором продолжает работать, пока скорость не снизится до ω01 . Далее машина переходит в двигательный режим,
и поскольку ее момент меньше статического, скорость продолжает уменьшаться. Установившийся режим наступит при скорости ωc1 , при которой
M = M c .
Расчеты, связанные с регулированием скорости, и построение скоростных и механических характеристик при потенциометрическом включении двигателя параллельного возбуждения производятся по уравнениям (3.23) и (3.24). Для определения токов, протекающих через сопротивления Rш и Rп
при различных нагрузках и режимах работы, следует использовать уравнения
(3.21) и (3.22).
Все сказанное о влиянии величин сопротивлений Rш и Rп на напряжение холостого хода Uд1 и на падение напряжения IяRэ , от которых зависят
скорость холостого хода и изменение скорости при нагрузке, полностью распространяется и на двигатели последовательного возбуждения. Однако изменение скорости холостого хода, а также скорости при нагрузке двигателя последовательного возбуждения зависит не только от изменения напряжения Uд1 и падения напряжения IяRэ , но и от изменения магнитного потока.
При включении сериесной обмотки двигателя последовательного возбуждения в цепь якоря (см. рис. 3.16, а) магнитный поток двигателя зависит от тока якоря Ф(Iя ). Особенностью данной схемы является то, что двига-
тель не может работать вхолостую, а также в генераторном режиме. Объясняется это тем, что в двигательном режиме при M = M c → 0 независимо от ве-
личин сопротивлений Rш и Rп Iя → 0 , Ф → 0 , ω = ω0 → ∞ . Как видно, при
80
включении сериесного двигателя по схеме, изображенной на рис. 3.16, а, снижения скорости холостого хода из-за уменьшения напряжения на двигателе не происходит. Скорость снижается в данном случае лишь при нагрузке двигателя, когда Iя ¹ 0 и Ф ¹ 0 . Механические характеристики при различ-
ных сопротивлениях Rш и Rп изображены на рис. 3.17, б. Когда Rш = ¥ , ха-
рактеристика соответствует обычной схеме включения двигателя с сопротивлением в цепи якоря, равным Rп . При Rп = 0 получается естественная харак-
теристика двигателя. Изменение скорости при увеличении нагрузки обусловлено увеличением падения напряжения в сопротивлении Rэ и магнитного по-
тока. По мере насыщения магнитной цепи двигателя жесткость механических характеристик возрастает.
При включении двигателя последовательного возбуждения по схе-
ме на рис. 3.16, б магнитный поток двигателя зависит от тока Iп . Связь между токами Iп и Iя нетрудно получить путем совместного решения уравнений
(3.21) и (3.22):
Iп = |
U |
|
+ |
Rш |
|
|
Iя . |
(3.25) |
|
Rш + Rп |
|
|
|
||||||
|
|
|
Rш + Rп |
|
|||||
График Iп ( Iя ) изображен на рис. 3.17, г. |
|
||||||||
При работе двигателя вхолостую ( Iя |
= 0 ) |
|
|||||||
|
Iп = |
|
|
U |
|
> 0, |
|
||
|
|
|
|
|
|
||||
|
|
Rш + Rп |
|
|
|||||
|
|
|
|
|
|
|
|
||
поэтому магнитный поток при холостом ходе не равен нулю, как в предыдущей схеме, и двигатель имеет конечную скорость холостого хода
w01 |
= |
U |
× |
Rш |
= |
U |
д1 |
. |
||
cE |
Ф |
Rш + Rп |
cE |
Ф |
||||||
|
|
|
|
|
||||||
При уменьшении сопротивления Rш напряжение Uд1 уменьшается, а ток Iп и магнитный поток при холостом ходе возрастают. Это приводит к снижению скорости холостого хода. При увеличении сопротивления Rп напряжение Uд1 уменьшается, а ток Iп и магнитный поток при холостом ходе
возрастают. Это приводит к снижению скорости холостого хода. При увеличении сопротивления Rп напряжение Uд1 , ток Iп и магнитный поток умень-
шаются. Если магнитная цепь насыщена, то увеличение сопротивления Rп