

Pakhomov_A_N__Krivenkov_M_V_Elektricheskiy_privod_uchebnoe_posobie
.pdf171
налов (импульсов), сумматоры, выполняющие операцию сложения двух чисел, и компараторы, используемые для сравнения двух чисел. Логические цифровые узлы осуществляют различные логические операции над дискретными электрическими сигналами. К ним относятся распределители импульсов, шифраторы и дешифраторы для преобразования входного сигнала, мультиплексоры и демультиплексоры для согласования передачи информации от нескольких источников по одному каналу.
В качестве примера рассмотрим построение двоичного счетчика на базе Т-триггеров (рис. 6.9), выполняющего последовательный прямой счет входных электрических импульсов с представлением результата счета в двоичном коде.
|
D1 |
D2 |
Dn |
|
T1 |
T2 |
Tn |
T |
T |
... |
T |
|
|
Рис. 6.9 |
|
Поступающий на счетный вход T cигнал с прямого выхода предыдущего триггера включает своим задним фронтом следующий триггер. Совокупность выходных сигналов D1-Dn соответствует числу импульсов в двоичном коде, поступивших на счетчик к данному моменту времени. Если в качестве выходных сигналов использовать сигналы инверсных выходов триггеров, получается счетчик обратного счета (вычитающий счетчик). Счетчики, допускающие переключение из режима суммирования в режим вычитания числа поступивших на него импульсов, называются реверсивными.
Устройства памяти предназначены для запоминания, хранения и выдачи информации. К ним относятся регистры, матрицы-накопители и запоминающие устройства: оперативные запоминающие устройства (ОЗУ) и постоянные запоминающие устройства (ПЗУ).
Микропроцессорная система (МПС) управления – программно-
управляемый комплекс цифровых устройств, предназначенный для обработки информации и управления технологическим процессом по программе. В состав такой системы управления входит очень большое число элементов (рис. 6.10): МП (микропроцессор – собственно главный элемент для выполнения арифметико-логических операций), ОЗУ и ПЗУ (для хранения обрабатываемой информации и программ), БУ (блок управления), УС (устройства сопряжения) с внешними устройствами – ИУ, ЭПУ, УВВ (устройства ввода вывода для работы с человеком – дисплей, устройство печати, пульт управления и др.), ВЗУ (внешние запоминающие устройства) и другими МПС (верхнего уровня).

172
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МПС |
||
|
|
МП |
|
|
БУ |
|
|
ОЗУ |
|
ПЗУ |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УС |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИУ |
|
|
ЭПУ |
|
|
УВВ |
|
|
ВЗУ |
|
|
МПС |
||||||||||||||
|
|
|
|
|
|
|
|
верхнего уровня |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.10 |
|
|
|
|
|||||||||
По назначению и характеристикам различают следующие типы МПС [12]:
•унифицированные блочные микропроцессорные комплексы, которые предназначены для создания локальных систем автоматического управления отдельных агрегатов, технологических комплексов и промышленных систем;
•специализированные мини- и микроЭВМ, ориентированные на конкретный тип объекта управления и наиболее часто используемые как встраиваемые;
•мини- и микроЭВМ общего назначения, персональные ЭВМ, управляющие мини- и микроЭВМ, которые имеют в своем составе широкий набор устройств сопряжения и обладают возможностью выполнения больших объемов вычислительных операций (решение сложных задач управления, оптимизация режимов технологических процессов, статистические методы их контроля, хранения и обработки больших объемов информации, управление в реальном масштабе времени и др.);
•программируемые контроллеры, представляющие собой микропроцессорные системы, предназначенные для управления локальными объектами в реальном масштабе времени.
Появившиеся как средство для замены релейной автоматики и устройств жесткой (монтажной) логики программируемые контроллеры в настоящее время ориентируются на широкое использование в промышленной среде для решения самых разнообразных задач автоматизации. Для этого программируемые контроллеры имеют соответствующее конструктивное исполнение и специальное программное обеспечение, легко осваиваемое персоналом, не имеющим специальной подготовки в области программирования.
По сравнению с аналоговыми системами микропроцессорные системы обладают рядом преимуществ:
1) гибкость управления – возможность путём перепрограммирования изменять не только параметры системы управления, но алгоритмы и даже структуры при неизменной аппаратной части системы;
2) легкость настройки требуемой структуры управляющего устройства
изаконов управления, поскольку микропроцессорная система управления работает по программе;

173
3)самодиагностика и самотестирование устройств привода – возмож-
ность проверки исправности механических узлов, силовых преобразователей, датчиков и другого оборудования;
4)более высокая точность за счёт отсутствия дрейфа нуля, характерного для всех аналоговых устройств (дрейф нуля не позволяет точно измерить малые рассогласования в аналоговых системах) и увеличенной разрядной сетки (длины машинного слова) современных микропроцессоров;
5)простота визуализации параметров процесса управления путём применения цифровых индикаторов, индикаторных панелей и дисплеев, организация диалогового режима обмена информацией с оператором в целях управления;
6)большая надёжность за счет высокой помехоустойчивости цифровых элементов.
Предположим теперь, что функции регулятора выполняет ЭВМ или МПС (рис. 6.10). Непрерывный входной сигнал Uвх (t) поступает на вход ана-
лого-цифрового преобразователя АЦП (см. разд. 6.4) и в определённые моменты времени kT (k = 0, 1, 2, …) вводится в ЭВМ, где T – период ввода (квантование по времени). Этот сигнал интерпретируется вычислительным устройством как некоторая последовательность чисел Uвх[k], которая должна быть преобразована в некоторую другую последовательность чисел Uвых[k] в соответствии с заданным алгоритмом управления и выдана на выход ЭВМ, т. е. на вход цифроаналогового преобразователя ЦАП, который преобразует её в аналоговый сигнал. Этот сигнал и является управляющим воздействием, поступающим на вход объекта управления (например, на ЭПУ). Очевидно, что сигналы на входе ЭВМ являются дискретными как по уровню, так и по времени.
Для реализации П-регулятора используется простой алгоритм цифрового управления: Uвых[k] = ΚпUвх[k].
При малом периоде квантования по времени T уравнение ПИрегулятора (6.3) можно представить в виде разностного уравнения:
|
T |
k |
|
|
Uвых[k] = ΚпUвх[k] + |
∑Uвх[i −1]. |
(6.4) |
||
|
||||
|
Ти i=1 |
|
||
От полученного уравнения несложно перейти к рекуррентному алгоритму, в котором для вычисления текущего значения выходного сигнала Uвых[k] используется его значение в предыдущем такте расчета Uвых[k–1]. Для этого из уравнения (6.4) вычтем разностное уравнение для выходного сигнала
T k −1
на предыдущем шаге расчета Uвых[k −1] = ΚпUвх[k −1] + Ти ∑i=1Uвх[i −1]. После несложных преобразований получим окончательное выражение:
|
|
174 |
Uвых[k] = ΚпUвх[k] + |
T |
− Κп Uвх[k −1] + Uвых[k −1]. |
|
||
Ти |
|
|
Аналогично выводится алгоритм работы ПИД-регулятора:
|
|
T |
|
|
T |
|
T |
|
|
T |
|
|
Uвых[k] = |
Κп + |
д |
Uвх[k] + |
|
− Κп − 2 |
д |
Uвх[k −1] |
+ |
д |
Uвх[k − 2] |
+ Uвых[k −1]. |
|
|
Ти |
|
|
|||||||||
|
|
Т |
|
|
|
Т |
|
|
Т |
|
||
Итак, для определения Uвых[k] необходимо знать значения Uвых, которые рассчитаны на предыдущих этапах расчета. Поэтому такие алгоритмы программной реализации цифровых регуляторов требуют меньших затрат на машинное время и аппаратных затрат на хранение данных.
Цифровые алгоритмы реализуются следующим образом [4]. Человек с пульта управления или программа посылает запрос МП на разрешение информационного обмена. МП обращается к УВВ за программой задающего воздействия, которую сохраняет в ОЗУ. При необходимости туда же из ПЗУ ил ВЗУ заносятся константы, необходимые для расчета управляющего (выходного) воздействия. Получив разрешение на отработку программы, МП запускает контроллер прерываний и приступает к выполнению так называемой «фоновой» программы, во время выполнения которой ведется опрос пульта управления и УВВ с целью контроля каких-либо изменений в работе (нажатия кнопки, срабатывания конечных выключателей или защиты и др.)
С периодом T контроллером формируется сигнал прерывания. По этому сигналу МП прерывает выполнение фоновой программы и переходит к выполнению программы обработки прерываний. Сначала через УС (интерфейсы передачи информации) опрашивается состояние ИУ (датчиков), информация с которых передается в ОЗУ. Затем МП рассчитывает ошибку меж-
ду заданным и фактическим значением сигнала εх = x − x′ и преобразует ее
по |
запрограммированному алгоритму работы цифрового регулятора |
( εх |
= Uвх ). В результате формируется код задания Uвых , который передается |
через УС на ЭПУ. На этом цикл обработки прерывания завершается и продолжается работа фоновой программы с того места, где она была прервана.
Электромагнитные муфты и тормозы представляют собой электро-
механические устройства, управляемые электрическим сигналом. Муфты позволяют соединять или разъединять валы, регулировать скорость движения механизма при постоянной скорости ЭДУ, а тормозные устройства обеспечивают остановку РО и его фиксацию в неподвижном состоянии при отключенном ЭДУ. Работа этих устройств осуществляется за счет действия электромагнитных сил между ведущей и ведомой частями муфты или колодками электромагнита и тормозным шкивом на валу РО или ЭДУ.

175
6.3. Датчики и фильтры информационного канала электропривода
Датчики, используемые в системах автоматизированного электропривода, весьма разнообразны. По роду выходного сигнала датчики систем электропривода являются, как правило, электрическими и могут быть классифицированы по различным признакам. По виду контролируемой величины (по входному сигналу) различают датчики перемещения, скорости, усилия, тока, напряжения, температуры, влажности, размеров, расхода и т. д. Следует отметить, что восприятие и преобразование одних и тех же входных величин может осуществляться датчиками, основанными на физически различных принципах действия. По характеру изменения во времени выходного сигнала различают аналоговые и цифровые датчики. По характеру измерения технологической переменной – датчики прямого и косвенного контроля. Можно также классифицировать датчики по физическим принципам работы (фотодатчики, тензодатчики, электромеханические, электромагнитные и другие датчики).
При построении схем управления по принципу времени в качестве датчиков времени можно использовать электромагнитные реле времени (рис. 6.11), принцип действия которых аналогичен обычному электромагнитному реле (рис. 5.2). Наличие на магнитопроводе медной гильзы замедляет спадание магнитного потока при снятии с катушки напряжения за счет действия вихревых токов, которые своим магнитным потоком поддерживают основной поток.
Методы регулировки задержки
замыкания (размыкания) контактов: |
KT1 |
|
|
|
|
|
выдержка времени |
|||
1) установка латунной немаг- |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
на размыкание |
||
|
|
|
|
|
|
|
|
|||
нитной прокладки между якорем и |
|
|
|
|
|
|
|
|
|
выдержка времени |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
сердечником – уменьшение толщины |
|
|
|
|
|
|
|
|
на замыкание |
|
увеличивает время срабатывания; |
|
|
|
|
|
|
|
|
||
2) изменение натяжения пружи- |
|
|
Рис. 6.11 |
|||||||
ны возврата. |
|
|
|
|
|
|
|
|
||
Электронные реле времени используют в своих схемах конденсаторы, время заряда и разряда которых и определяет выдержку времени.
Кроме этого, существуют механические (анкерные, маятниковые), пневматические, моторные (электромеханические) реле времени [12].
Вмикропроцессорных средствах управления в качестве датчика времени используются таймеры и счетчики.
Вкачестве датчиков тока схемах электропривода используются главным образом реле тока. Их катушки, изготовленные из толстого провода с малым числом витков, непосредственно включаются в цепь контролируемого (регулируемого) тока двигателя. При достижении этим током уровней срабатывания или отпускания происходит коммутация контактов реле тока, кото-

176
рые производят соответствующие переключения в схемах управления двигателем.
Сигнал, пропорциональный току ДПТ, может быть получен также с помощью шунта, а в схемах электроприводов с двигателями переменного тока в качестве датчиков тока применяются трансформаторы тока, что позволяет осуществлять потенциальное разделение силовых цепей и цепей управления.
В промышленных системах автоматического управления обычно применяется схемы измерения тока с шунтом. Серийно выпускаемые преобразователи переменного тока в постоянный для этого комплектуются шунтом совместно со специальным устройством, называемым ячейкой датчика тока. Ячейка подключается к шунту сопротивлением Rш и обеспечивает гальвани-
ческую развязку между входными и выходными цепями. Коэффициент передачи датчика Kд может изменяться с помощью регулировочного потенцио-
метра. Напряжение на входе датчика лежит в диапазоне от 0 до75 мВ, выходное напряжение определяется равенством Uвых = KдUвх = KдIRш . Передаточ-
ная функция датчика тока описывается апериодическим звеном. Постоянная времени указывается в паспортных данных преобразователя или она может быть определена по формуле Тд = 2/(2πfп), где fп – полоса пропускания (не менее 2 кГц).
В качестве датчиков напряжения используются реле напряжения, позволяющие получать информацию в дискретном виде о контролируемых уровнях напряжения, например о его исчезновении. Для получения аналоговых сигналов об уровне напряжения используются потенциометрические датчики, а в цепях переменного тока – трансформаторы напряжения.
Наиболее простыми датчиками постоянного напряжения являются резисторные делители напряжения (рис. 6.12, а). Датчик напряжения характеризуется коэффициентом передачи Kд = Uвых /Uвх , который зависит от соотно-
шения параметров и определяется из принципиальной схемы датчика:
Kд = |
Rн |
|
. |
( Rн + R2 ) R1 / R2 |
|
||
|
+ Rн |
||
|
|
|
|
H |
|
R1 |
|
U |
I |
Uвх |
R2 |
Rн |
Uвых |
I |
|
E |
|||
|
|
|||
|
|
|
|
|
|
а |
|
|
б |
Рис. 6.12
177
Максимальное напряжение на выходе датчика при Rн >> R2 + R1 и R1 = 0
будет равно Uвых max = Uвх . Кроме того, Kд = R2 /(R1 + R2 ) только в режиме холостого хода делителя при Rн → ∞ .
Датчики магнитного потока (индукции) устанавливаются в воздушном зазоре двигателя и работают на основе эффекта Холла – в проводнике с током I, помещенном в магнитное поле с напряженностью H, возникает электриче-
ское поле в направлении, перпендикулярном векторам Hɺ и Iɺ (рис. 6.12, б). Если плотность тока I постоянна, то ЭДС Холла E пропорциональна H, т. е. магнитному потоку.
Датчики скорости предназначены для измерения скорости движения вала двигателя или исполнительного органа рабочей машины. Они представляют собой специализированные электрические машины небольшой мощности, выходное напряжение которых пропорционально скорости вращения их якоря (ротора). По принципу своего действия и устройству тахогенераторы бывают постоянного и переменного тока.
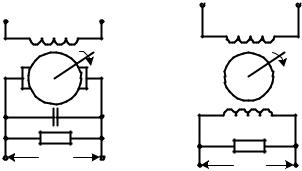
Тахогенератор постоянного тока представляет собой электрическую машину постоянного тока с независимым возбуждением или постоянными магнитами (рис. 6.13, а).
ОВ |
ω |
|
ОВ |
|
ДПТ |
АД |
ω |
||
|
С |
ОИ |
|
|
Rн |
Rн |
Uвых |
Uвых |
а |
б |
Рис. 6.13 |
|
Входная координата тахогенератора – |
угловая скорость ω , выходная – |
напряжение Uвых , выделяемое на сопротивлении нагрузки Rн . Передаточный коэффициент тахогенератора определяется выражением:
K |
тг |
= |
Uвых |
= |
EтгRн |
= |
|
сE Ф |
, |
|
|
|
|
||||||
|
|
ω (Rн +Rтг )ω 1 |
+ Rтг / Rн |
|
|||||
|
|
|
|
||||||
где сE , Ф и Rтг – конструктивная постоянная, магнитный поток и сопротивление якорной цепи тахогенератора.
178
Передаточный коэффициент тахогенератора, строго говоря, не остается постоянным при изменении скорости из-за нелинейности сопротивления щеточного контакта и реакции якоря. Нелинейность в зоне малой скорости уменьшают применением металлизированных щеток с малым падением напряжения. Нелинейность характеристики из-за реакции якоря снижается ограничением сверху скорости и увеличением сопротивления нагрузки. Для уменьшения коллекторных и зубцовых пульсаций в выходном напряжении тахогенератора используется конденсатор, выполняющий роль фильтра высокочастотных относительно угловой скорости ω пульсаций. При этом передаточная функция тахогенератора приобретает вид:
Wтг ( p) = |
Uвых ( p) |
= |
Kтг |
|
, |
|
ω( p) |
Tф p + 1 |
|||||
|
|
|
||||
где Tф = RтгC /(1 + Rтг / Rн ) – постоянная времени фильтра.
Тахогенераторы переменного тока наиболее часто выполнены на базе асинхронной двухфазной машины (рис.6.13, б). На статоре имеются две обмотки: обмотка возбуждения ОВ и выходная информационная обмотка ОИ, включенная на сопротивление нагрузки тахогенератора Rн. Если ТГ работает в режиме холостого хода, при котором Rн → ∞ , то характеристика управле-
ния в комплексном виде имеет вид Uɺвых = Kɺтгω , где Kɺтг – комплексное значе-
ние коэффициента передачи тахогенератора. Даже в режиме холостого хода комплексный коэффициент передачи тахогенератора достаточно сложно зависит от активных и индуктивных сопротивлений статорных и роторных цепей и от скорости вращения ротора, то есть характеристика управления тахогенератора нелинейна. Полоса пропускания асинхронного тахогенератора ограничена частотой питающей сети. По сравнению с тахогенераторами постоянного тока, асинхронный тахогенератор обладает существенно меньшим передаточным коэффициентом.
В современных системах электропривода с большими диапазонами регулирования скорости и высокими требованиями к ее стабилизации точности аналогового тахогенератора может оказаться недостаточной. Для таких систем используются цифровые датчики скорости. Функционально в цифровом датчике скорости можно выделить две основные части: импульсный преобразователь скорости, преобразующий угловую скорость вала в импульсы с частотой fи, и кодовый преобразователь, формирующий на интервале измерения Ти цифровой код выходной величины датчика скорости.
|
179 |
ИС1 |
ФД1 |
ИС2 |
ФД2 |
σ
Рис. 6.14
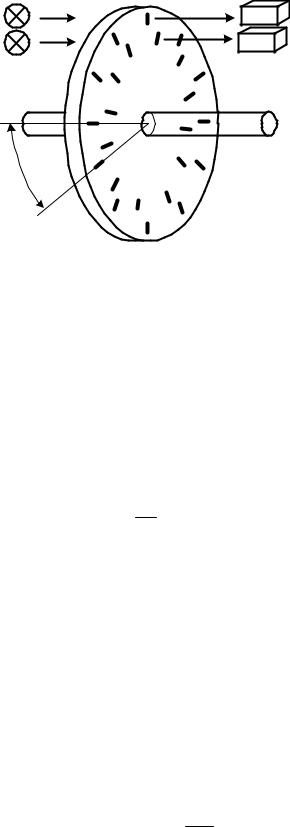
Импульсный преобразователь может быть выполнен, например, на основе фотоэлектрического кодового диска (рис. 6.14), вырабатывающего две серии импульсов, сдвинутых по фазе для определения направления вращения. На двух дорожках расположены пропускающие свет щели. Свет от источников ИС1 и ИС2 через щели попадает на фотодиоды ФД1 и ФД2, которые при этом открыты и пропускают ток. Когда щель выходит из луча света, фотодиоды запирают цепь. При вращении диска с угловой скоростью ω фотодиоды дают чередование максимального и минимального сигналов с частотой
fи = ω z = ω , 2π σ
где z – число импульсов на один оборот диска; σ – разрешающая способность датчика. В современных датчиках число щелей по периметру превышает 1000, а величина z при необходимости может быть в четыре раза больше числа щелей путем генерации импульсов на каждый фронт и срез выходных сигналов ФД1 и ФД2.
Формирование цифрового кода на выходе датчика скорости с помощью кодового преобразователя может выполняться двумя способами. В соответствии с первым способом на фиксированном и заранее известном периоде измерения Ти счетчик подсчитывает число импульсов Nи , которое будет харак-
теризовать среднее значение скорости за время Ти:
ω = 2π Nи . zTи
Точность датчика, таким образом, тем выше, чем больше измеряемая скорость и период измерения. Увеличение значения Ти для уменьшения по-
180
грешности при низких скоростях нежелательно, так как при этом возрастает дискретность по времени и увеличивается расхождение между средним и мгновенным значениями скорости.
Второй способ формирования цифрового кода скорости основан на измерении времени поворота вала Tи = NгиTги путем подсчета количества высо-
кочастотных (Tги << Tи ) импульсов Nги вспомогательного генератора на фиксированный и заранее известный угол ϕ = Nиσ . Данный способ имеет, напротив, высокую точность измерения низких скоростей ω , когда период Tи максимален и содержит наибольшее число Nги . При повышении скорости точ-
ность снижается.
Фотоимпульсные датчики классифицируются по способу размещения щелей или меток на прозрачном диске. На инкрементном датчике одинаковые метки распределены по диску равномерно, а абсолютный датчик имеет уникальную комбинацию меток для каждого углового положения.
Информация о скорости электропривода может быть получена также и от самого двигателя – якоря постоянного двигателя и ротора асинхронного двигателя, поскольку наводимая в них ЭДС пропорциональна скорости вращения.
Датчики положения подразделяются на две группы: контактные и бесконтактные. К контактным датчикам положения относятся путевые и конечные выключатели различных типов. Они используются для получения сигналов при достижении исполнительным органом рабочей машины определенных положений, которые затем поступают в цепи управления, защиты и сигнализации. Например, конечные выключатели применяются для предотвращения выхода моста подъемного крана за пределы подкрановых путей, а путевые выключатели используются для подачи команд управления в схему электропривода при подходе кабины лифта к месту остановки.
В замкнутых схемах управления электропривода применяются аналоговые и цифровые датчики положения. К аналоговым датчикам относятся сельсины, вращающиеся трансформаторы, магнесины и индуктосины. Все они представляют собой электрические машины малой мощности, которые обеспечивают преобразование угла поворота или положения движущегося тела в электрический сигнал.
Широкое распространение в электроприводе находят дискретные фотоэлектрические датчики положения. Эти датчики могут вырабатывать сигналы в виде импульсов напряжения или цифровом коде и отличаются высокой точностью, быстродействием, простотой и надежностью конструкции. Применение в электроприводе находят комбинированные датчики этого типа, позволяющие получать информацию как о положении, так и о скорости движения вала двигателя или исполнительного органа.
В некоторых случаях удобно использовать параметрические преобразователи. Ярким представителем таких преобразователей является потенцио-