

Δтабл - с графика
δтабл= -1
δϳ= ΔVн/-25*(-1)=-1,18
Оценка погрешности эхолота
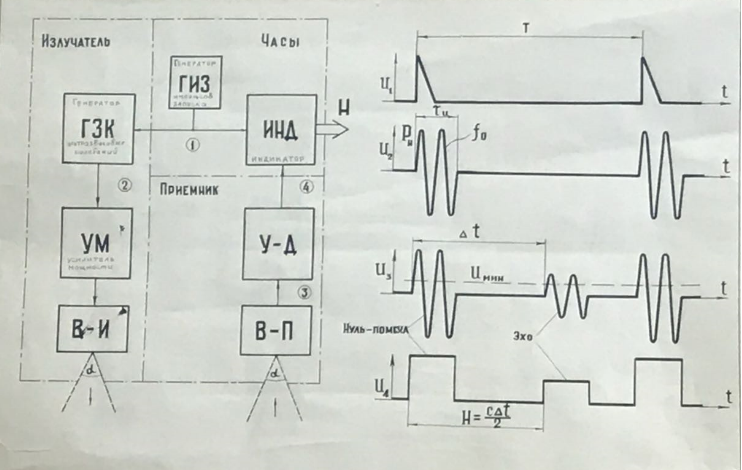
Принцип работы эхолотов основан на отражающих свойствах грунтов. Все эхолоты работают в ультразвуковом диапазоне частот. Для работы на судах необходимо два эхолота морской и речной. Для работы необходимо в речной и морской воде создать ультразвуковые колебания. Ультразвуковые колебания создаются вибратором излучателем, а принимаются вибратором приемником. Все эхолоты измеряют время прохождения ультразвука до дна и обратно.
Структурная схема эхолота
|
№ Вар. |
Ситуация №1 |
Ситуация №2 |
Ситуация №3 |
Ситуация № 4 |
|
|||||||
|
hизм м |
N об/мин |
hизм м |
V м/с |
hизм м |
γ град
|
hизм м |
l м |
|||||
|
23 |
1250 |
3300 |
300 |
1487 |
90 |
21 |
3,5 |
2,0 |
||||
Ситуация 1.
Если запись глубины осуществляется самописцем, то измеренную глубину эхолота необходимо исправить поправкой ∆hN:
∆hN= hизм * (N0/N – 1) (10)
∆hN= 1250 * (3150/3300 – 1) = -56,8 (м)
Ситуация 2
Отклонение скорости звука от расчётной.
∆hЭ = hизм* (V/V0 - 1) (11)
∆hЭ = 300 * (1487/1500 – 1) = –2,6
Ситуация 3 Изменение значения глубины от угла наклона днa
∆hγ = hизм* (secγ – 1) (12)
∆hγ = 90 * (1/сos21 – 1) = 6,4 (м)
Ситуация 4
При работе эхолота с двумя антеннами, разнесёнными на расстояние l, возникает погрешность, которая особенно ощутима при измерении малых глубин. Ошибку можно рассчитать по формуле:
∆hl = hизм * ([1 – (l/2hизм)]^½ – 1)
∆hl = 3,5 * ([1 – (2/2*3,5)]^½ – 1) = -2,443 (м)
|
№варианта |
∆hN(м) |
∆hЭ(м) |
∆hγ(м) |
∆hl (м) |
|
23 |
-56,8 |
-2,6 |
6,4 |
-2,443 |