

-
Классификация систем программного управления станками
Различают следующие виды систем программного управления:
ПУ – программное управление – управление станком по детерминированной программе;
ЦПУ – цикловое программное управление – управление циклами перемещений или режимами обработки по программе с заданием величины параметров на путевых переключателях или других измерительных преобразователях;
NC (ЧПУ) – числовое программное управление – числовое программное управление (Numerical control) – управление обработкой на станке по программе, заданной в алфавитно-цифровом коде;
HNC – разновидность ЧПУ (Hand NC) с ручным заданием программы с пульта устройства.
SNC – разновидность ЧПУ (Speicher numerical control), имеющая память для хранения всей управляющей программы
CNC – автономное управление станком с ЧПУ (Computer numerical control), содержащие ЭВМ или процессор
DNC – управление группой станков от общей ЭВМ (Direct numerical control), осуществляющее хранение программ и распределение их по запросам от устройств управление станков ( у станков могут быть установлены устройства типов NC, SNC, CNC).
Все многообразие структур устройств ЧПУ можно подразделить на две большие группы. К первой группе относятся устройства с постоянной структурой, в которых осуществляется ввод кодированной программы на перфоленте или декодированной программы на магнитной ленте . Нашли также применение простые позиционные устройства ЧПУ с заданием программы, размещенным непосредственно у станка на штекерных панелях. Созданы устройства с ручным вводом программы в электронную память с клавиатуры пульта (класса HNC).
Ко второй группе относятся устройства с переменной структурой. Их основные алгоритмы работы задаются программно и могут изменяться для различных применений. Эти устройства строятся на основе микроЭВМ либо микропроцессоров (класса CNC). В устройствах класса CNC и SNC можно формировать нестандартные циклы обработки, что существенно упрощает подготовку и редактирование программы.
Разрабатываются самонастраивающиеся (адаптивные) системы программного управления. В открытой системе имеется только один поток информации — от элемента «ввод программы» к рабочему органу; в замкнутой системе, кроме того, имеется дополнительная корректирующая информация по линии обратной связи о фактическом перемещении рабочего органа. В идеальном случае желательно также иметь информацию о факторах случайного характера, связанных с конкретным состоянием режущего инструмента, отклонениях физических свойств заготовки от заданных, температурных колебаний в процессе резания, а также о различных силовых и других воздействиях на систему. Система программного управления, в которой, помимо основного, имеется ряд дополнительных потоков информации, позволяющих корректировать процесс обработки с учетом маловероятных воздействий, называется самонастраивающейся.
2 РАЗРАБОТКА СТРУКТУРНО-ФУНКЦИОНАЛЬНОЙ СХЕМЫ СИСТЕМЫ. АНАЛИЗ ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ
2.1 Разработка функциональной схемы системы
Функциональная схема системы программного управления изображена на рисунке 2
З
МП
У
РУ
ГП
ЦАП






ГЭПП
АЦП
З – Управляющая программа; МП – микропроцессор; У – усилитель;
ГП – гидропривод; РУ – регулирующее устройство; ГЭПП – гидроэлектрический преобразователь плотности.
Рисунок 2 - Функциональная схема системы программного управления
Гидроэлектрический преобразователь плотности преобразует плотность рабочей жидкости в электрический сигнал. Сигнал преобразуется из аналогового в цифровой с помощью АЦП.
Микропроцессор выполняет функции сопоставления задания с информацией ГЭПП и вырабатывает управляющий сигнал, который преобразуется в аналоговый с помощью ЦАП и идет на усилитель.
Программное обеспечение разработано на языке Delphi 7. При разработке программного обеспечения, естественно, должны использоваться все современные элементы интерфейса «человек-ЭВМ» (окна, контекстные меню, контекстные справки, графические образы, мониторинг времени) и поддерживаться все существующие типы устройств ввода-вывода. А также использование одинакового интерфейса для различных станков значительно облегчает подготовку и повышает эффективность использования обслуживающего персонала (технологов, операторов и наладчиков). Всё это дает возможность изменять(модернизировать) программу в условиях цеха.
2.2 Выбор и расчет элементов системы
2.2.1 В ы б о р д а т ч и к а о б р а т н о й с в я з и С А Р с к о р о с т и д в и ж е н и я р а б о ч е г о о р г а н а м е т а л л о р е ж у щ е г о с т а н к а. В качестве датчика обратной связи САР скорости движения рабочего органа станка выбираем гидроэлектрический преобразователь плотности (ГЭПП), предназначенный для измерения плотности минеральных масел.
Конструкция применяемого ГЭПП изображена на рисунке 3.

1 – трубопровод; 2 – капилляр; 3 – проточная часть ГЭПП; 4 – катушки индуктивного датчика; 5 – магнитожидкостный сенсор
Рисунок 3 – Конструкция ГЭПП
Чувствительным элементом ГЭПП является полусферический поплавок 5, выполненный из эластичной резины и заполненный магнитной жидкостью. Так как магнитная жидкость обладает намагниченностью благодаря наличию ферромагнитных частиц, то поплавок выполняет роль сердечника дифференциального индуктивного датчика. В ГЭПП используется магнитная жидкость марки Т-40. Материал оболочки поплавка – эластичная масло- и кислотостойкая резина.
ГЭПП представляет собой полый стакан 3, соединенный через капилляр 2 с трубопроводом 1, по которому проходит исследуемая жидкость. Стакан расположен внутри катушек индуктивного датчика 4, сердечником которого является МЖ сенсор 5, жестко закрепленный по верхнему краю стакана.
Измерительный стакан имеет размеры: высота=45 мм, диаметр=35 мм, толщина стенок=1мм. Размеры магнитно-жидкостного сенсора: длина 17,35 мм; толщина оболочки 0,05 мм. Капилляр имеет размеры: длина=45 мм, диаметр=5 мм. Длина трубопровода 76 мм, диаметр трубопровода 8 мм. Капилляр 2 представляет собой трубку из оргстекла.
При измерении плотности на магнитно-жидкостный сенсор воздействует поток жидкости. От характера воздействия, то есть распределения сил по поверхности магнитно-жидкостного сенсора, зависят многие факторы, влияющие на качество работы ГЭПП: долговечность оболочки МЖ сенсора; чувствительность МЖ сенсора к изменению скорости потока.
Объем магнитной жидкости в чувствительном элементе:
Vмж=h2(r-1/3h),
где Vмж - объем магнитной жидкости, м3;
h – высота сегмента чувствительного элемента, в котором находится магнитная жидкость, м;
r – радиус сегмента чувствительного элемента, м.
Vмж=3,140,0152 (0,0175-1/30,015)=8,83510-6(м3)
Масса магнитной жидкости в оболочке:
m=Vмжмж,
где m - масса магнитной жидкости в оболочке, кг;
мж – плотность магнитной жидкости, кг/м3.
m=8,83510-6103=8,83510-3 (кг).
Параметры катушек дифференциального индуктивного датчика:
- высота Hк, мм 20;
- внутренний диаметр Dвн, мм 35;
- внешний диаметр Dв, мм 45;
- высота намотки Нн, мм 4;
- внешний диаметр Dв, мм 45;
- высота намотки Нн, мм 4;
- число витков N 2553;
- длина медного провода l, мм 2672.
Принцип действия ГЭПП: при изменении плотности рабочей жидкости происходит деформация чувствительного элемента ГЭПП. Это приводит к изменению взаимоиндуктивности измерительных катушек дифференциально-индуктивного датчика и, следовательно, к изменению значений тока.
Входные характеристики ГЭПП:
- напряжение Uвх, В 12;
- изменение плотности потока , кг/м3 860…880.
Выходные характеристики ГЭПП:
- максимальное напряжение Uвых, В 0,06;
- максимальный ток I, А 0,005.
Статическая характеристика ГЭПП представляет собой зависимость тока индуктивного датчика от плотности исследуемой среды I=f(ρ).
Экспериментальные данные, полученные при исследовании статических характеристик ГЭПП, аппроксимируются линейными зависимостями методом наименьших квадратов по формуле:
I=b+k∙ρ,
Коэффициенту k соответствует чувствительность ГЭПП, определяющаяся по формуле:
![]()
При выбранных конструктивных параметрах наибольшая чувствительность ГЭПП, равная 0,222 мА∙м3/кг, для давления рабочей жидкости 0,045 МПа достигается при расходе 0,16 м3/ч. Статическая характеристика описывается зависимостью:
I= -190+0,222∙ρ, (1)
ρ,
кг/м3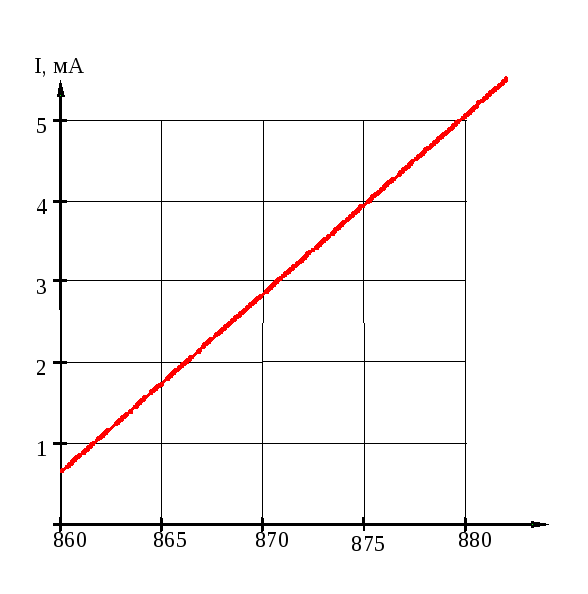
Рисунок 4 - Статическая характеристика ГЭПП, соответствующая
наибольшей чувствительности
Динамическая характеристика ГЭПП представляет собой зависимость напряжения на измерительных катушках от плотности в переходном режиме U=f(Δρ).
Динамические свойства объекта описываются передаточной функцией:
![]()
2.2.2 М и к р о п р о ц е с с о р н ы й б л о к. Внешний модуль АЦП/ЦАП для шины RS232 предназначен для сопряжения аналоговых и дискретных элементов системы автоматического регулирования. Основные характеристики сведены в таблицу 2.
Таблица 2 - Технический характеристики модуля:
|
Наименование |
Значение |
|
АЦП |
|
|
Количество каналов |
16 дифференциальных или 32 с общей "землёй" |
|
Разрядность АЦП |
14 бит |
|
Эффективная разрядность |
13.3 бит (400 кГц, диапазон измерений 2.5 В.) |
|
Входное сопротивление |
не менее 1 Мом |
|
Диапазон входного сигнала |
±10 В; ±2,5 В; ±0,625 В; ±0,15625В |
|
Максимальная частота преобразования |
400 кГц |
|
Синхронизация |
от синхросигнала/по уровню АЦП |
|
Межканальное прохождение |
-78дБ (синусоида 10 кГц) |
|
Сигнальный процессор |
|
|
Тип |
ADSP 2185М |
|
Тактовая частота |
48МГц |
|
Внутреннее ОЗУ данных |
16 кСлов |
|
Внутреннее ОЗУ программ |
16 кСлов |
|
FIFO буфер АЦП |
512-12288 Слов |
|
ЦАП |
|
|
Количество каналов |
2 |
|
Разрядность |
12 бит |
|
Время установления |
8 мкс |
|
Время установления |
8 мкс |
Промышленный компьютер строиться на базе высокопроизводительного процессора Intel Pentium III. Материнская плата ABIT имеет 1 слот ISA и 3 слота PCI, а так же последовательную шину передачи данных RS232 (com port) для подключения внешнего модуля ЦАП/АЦП.
Динамические свойства микропроцессорного блок описываются передаточной функцией:
W(p)=1
2.2.3 У с и л и т е л ь м о щ н о с т и. В качестве усилителя мощности выбираем усилитель К157УД1. Схема включения усилителя приведена ниже.

Рисунок 5 – Схема усилителя мощности К157УД1
Напряжение питания Uп = ±15 В, С1 = 68 пФ, С2 = 6 пФ, R1 = 30 кОм. Сопротивление нагрузки RH=0.02 кОм. Напряжение на выходе UВЫХ = 12 В.
Ток потребляемый нагрузкой может достигать 1А. Коэффициент усиления по напряжению равен единице. Следовательно передаточная функция усилителя будет:
W(p) = 1
2.2.4 Г и д р о ц и л и н д р ( Г Ц ) . Данный силовой цилиндр представляет собой гидродвигатель. Внутренний диаметр цилиндра равен 0,2 м, а рабочее давление 5 МПа. Схема гидроцилиндра изображена на рисунке 6.

1 , 2 , 6 – впускные и выпускные патрубки подачи рабочей жидкости, 3 – шток поршня, 4 – деталь, 5 – возвратная пружина.
Рисунок 6 - Гидроцилиндр
Выберем гидродвигатель Ц 200 его характеристики:
- диаметр поршня, мм 140
- диаметр штока, мм 142
- внутренний диаметр цилиндра, мм 200 - скорость перемещения, см/с 6,3
- длина хода, мм 40
- длина одного перемещения (равна цене импульса), мм 0,01
- механическое КПД 0.93
Рассчитаем усилие F на поршне:
F=P-Sэф
где Р - рабочее давление, Мпа;
Sэф - эффективная площадь поршня, м.
Тогда
![]() (2)
(2)
Расход рабочей жидкости Q равен:
Q=v · Sэф
где v - скорость перемещения поршня.
Q=v · Sэф = 6 л/мин (3)
В гидроцилиндре необходимо сделать демпферное отверстие, соединенное с каналом слива, для того чтобы не было зон застоя и для избежания гидравлического удара об дно цилиндра при резком значительном перемещении поршня гидроцилиндра. Коэффициент демпфирования принимаем равной 1.
ζд =1 .
Согласно атласу Топчеева передаточная функция гидродвигателя равна:
![]()
где ζд - коэффициент демпфирования, он равен 1, поэтому; Тд1,Тд2 - постоянные времени.
Тд1=![]()
Тд2=![]()
Так как коэффициент демпфирования равен 1, то:
Тд1=![]() =
Тд ,
=
Тд ,
Тд2=![]() =
Тд ,
=
Тд ,
Тд1 и Тд2 равны между собой:
Тд =Тд1 =Тд2
Тогда:
![]() (4)
(4)
где Тл согласно Топчееву равен:
Тд
=

где Е - модуль объемной упругости, для масла трансформаторного Е=1,768па;
V - объем рабочий, он равен V=3,14*0,04*0,12=0,001 м3;
Ку - коэффициент характеризующий утечку, равен 0,005;
Кгд - коэффициент гидродвигателя, равен 0,0074
Кω - коэффициент жидкостного трения в напорном трубопроводе, он рассчитывается по формуле:
Кω
=
![]() (5)
(5)
где λ. - Коэффициент Дарси;
v - динамическая вязкость рабочей жидкости, равна 1,2-1 (У6 м/с при
числе Рейнольдса равной 100000;
υ - скорость в напорном трубопроводе, рассчитывается по формуле:
![]()
Согласно выбранному ГЦ скорость перемещения поршня достигает 6,3 см/с. Примем данное значение: υ =6 см/с
Диаметр напорного трубопровода:
![]() ,
(6)
,
(6)
По сортаменту принимаем d = 0,01 м
Тогда подставим полученные значения в выражение:
Кω
=
![]() (7)
(7)
Кω = 2,1·10-2
Найдем Кд:
![]() =46,39 (8)
=46,39 (8)
Теперь найдем Тд согласно формуле:
Тд
=
![]() =0,00114 (9)
=0,00114 (9)
Подставим полученные значения в формулу (4) передаточной функции и получим:
![]()
2.2.5 Э л е к т р и ч е с к и й м а г н и т о ж и д к о с т н ы й р е г у л и р у ю-щ и й э л е м е н т ( Э М Ж Р Э ). В качестве регулирующего устройства выбираем ЭМЖ РЭ. Принцип действия данного ЭМЖ РЭ основан на управлении магнитным полем специальной упругой оболочки, заполненной магнитной жидкостью. Конструктивная схема устройства приведен на рисунке 6.

Рисунок 7 – Конструктивная схема ЭМЖ РЭ
Рабочий поток жидкости подается в устройство по входному патрубку 9. Далее поток подается в проточную часть устройства 8. Проточная часть образована поверхностями магнитожидкостного сенсора 6 и крышкой электрогидравлического регулятора потока 2. От источника управляющего напряжения подают напряжение ( 2-5 В) на управляющую катушку 3. Под действие внешнего электромагнитного поля магитожидкостный сенсор 6 изменяет свою форму. В связи с этим происходит деформация пространства проточной части, это приводит к изменению расхода рабочей жидкости на выходе регулятора потока.
Динамический свойства объекта описываться уравнением:
![]()
На основе полученных передаточных функций составим функциональную схему (рисунок 8). Передаточные функции всех элементов сведем в таблицу 3.

Рисунок 8 – Функциональная схема системы
Таблица 3 – Передаточный функции элементов системы
|
Наименование элемента |
Передаточная функция элемента |
|
Промышленный компьютер |
Wк(р) = 1 |
|
Цап/АЦП |
Wцап(р) = Wацп(р) = 1 |
|
Усилитель мощности |
Wу(р) = 1 |
|
Регулирующее устройство (ЭМЖ РЭ) |
Wэмж
рэ(р) =
|
|
Гидроцилиндр |
Wгц(р)
=
|
|
Датчик обратной связи (ГЭПП) |
Wгэпп(р)
=
|
2.3 Расчёт устойчивости системы
2.3.1 Р а с ч ё т п е р е д а т о ч н о й ф у н к ц и и и п о с т р о е н и е А Ч Х н е п р е р ы в н о й ч а с т и с и с т е м ы. Для расчетов передаточных функций и построения характеристик системы воспользуемся программой MATLAB.
Определим передаточную функцию разомкнутой системы :
![]()
Wр=![]()
Передаточная функция замкнутой системы:
![]()
![]()
Так как в данной САР установлен цифровой микропроцессор, который осуществляет вычисление сигнала рассогласования и посылает управляющие сигналы на устройства системы, то расчет следует провести для дискретной системы. При этом необходимо задать период дискретизации (интервал опроса датчиков) системы.
Чем меньше период дискретизации Т0, тем более дискретная система приближается по своим свойствам к непрерывной. Однако при слишком малых значениях Т0 процессор в реальной системе может не успевать выполнять все необходимые вычисления. Кроме того, при уменьшении Т0 увеличивается число шагов переходного процесса. Так как вычисления проводятся по рекуррентным формулам, неизбежные ошибки вычислений накапливаются от шага к шагу и при чрезмерно большом числе шагов ошибка вычислений может превысить допустимую величину (система может оказаться неустойчивой, либо с неудовлетворительным качеством переходного процесса). В силу сказанного, Т0 не должно быть слишком мало. Выберем период дискретизации равным постоянной времени ГЭПП деленым на 10. Тгэпп/10=0,01 с (опрос датчиков происходит примерно 10 раз в секунду).
2.3.2 П р о в е р к а у с т о й ч и в о с т и д и с к р е т н о й с и с т е м ы п о ч а с т о т н о м у к р и т е р и ю. Частотный критерий устойчивости импульсных систем аналогичен критерию устойчивости Найквиста для непрерывных систем, и формулируется следующим образом: если разомкнутая импульсная система устойчива, то замкнутая импульсная система регулирования устойчива, если амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы не охватывает точку (-1; j0).
Построим АФЧХ разомкнутой системы с передаточной функцией замкнутой цепи, для чего осуществим переход от операторной формы записи передаточной функции к z-форме.
Дискретная передаточная функция разомкнутой системы примет вид:
![]() Построим АФЧХ разомкнутой дискретной
системы:
Построим АФЧХ разомкнутой дискретной
системы:

Рисунок 9 - АФЧХ разомкнутой дискретной системы
Так как АФЧХ разомкнутой системы, построенная на рисунке , не охватывает точку (-1; j0), то замкнутая импульсная система регулирования устойчива.
2.3.3 П о с т р о е н и е л о г а р и ф м и ч е с к и х ч а с т о т н ы х х а р а к т е р и с т и к с и с т е м ы и и х а н а л и з. Линейные типовые звенья можно разделить на два типа – непрерывные и дискретные. Частотные характеристики линейных непрерывных типовых звеньев находятся из передаточных функций после подстановки в них s = jω и выделения действительной и мнимой частей, то есть:
W0 (jω) = U0 (ω) + jV0 (ω) (11)
где U0 (ω) и V0 (ω) – соответственно действительная и мнимая частотные характеристики.
Пользуясь выражением (11), в декартовой системе координат строят амплитудно-фазовые частотные характеристики W0 (jω) . Если перейти к полярной системе координат, то выражение () можно переписать в виде:
W0 (jω) = H'0 (ω) e jθ0 (ω), (12)
где H'0 (ω) и θ0 (ω) – соответственно амплитудная и фазовая частотные характеристики.
Из выражений (11) и (12) можно найти формулы для вычисления амплитудной и фазовой частотных характеристик:
![]() (13)
(13)
![]() (14)
(14)
Частотные характеристики линейных дискретных типовых звеньев находятся путем приведения передаточных функций к комплексной переменной
s̄ = jω̄, которая связана с переменными s и z следующими соотношениями:
![]() (15)
(15)
![]() (16)
(16)
Логарифмические частотные характеристики представляют собой амплитудную и фазовую частотные характеристики САР, построенные в полулогарифмическом масштабе.
Логарифмической амплитудной частотной характеристикой (ЛАЧХ) системы называется кривая, соответствующая 20 десятичным логарифмам модуля частотной характеристики (АЧХ), построенная в десятичном логарифмическом масштабе частот:
![]() ,
,
где ![]() - амплитудно-частотная функция системы.
- амплитудно-частотная функция системы.
Тогда для построения ЛАЧХ можно использовать передаточную функцию непрерывной разомкнутой системы. Данное выражение представляет собой произведение коэффициента усиления и передаточных функций элементарных динамических звеньев.
Известно, что псевдочастота практически совпадает с круговой частотой в области, где выполняется условие:
T0<2Tmin, (17)
где Tmin – минимальная постоянная времени элементов разомкнутой системы.
Так как минимальная
постоянная времени, соответствующая
датчику обратной связи равна 0.016 с.,
выбранный период дискретизации – 0.01,
то неравенство (17) выполняется всегда
(0.01<2.0.016) и во всей области работы
системы можно положить
![]() .
Логарифмической фазовой частотной
характеристикой (ЛФЧХ) системы называется
фазовая частотная характеристика,
построенная в десятичном логарифмическом
масштабе частот.
.
Логарифмической фазовой частотной
характеристикой (ЛФЧХ) системы называется
фазовая частотная характеристика,
построенная в десятичном логарифмическом
масштабе частот.

Рисунок 10 - ЛАЧХ и ЛФЧХ разомкнутой системы
По построенным логарифмическим характеристикам определим запасы устойчивости системы, характеризующие степень удаления её от границы устойчивости:
- по фазе – превышение графика ЛФЧХ над прямой -π на частоте пересечения ЛАЧХ нулевого уровня – величина в децибелах, на которую нужно изменить коэффициент преобразования системы, для того, чтобы привести её к границе устойчивости. В данном случае запас по фазе равен 89.7 градусам;
- по амплитуде – превышение графика ЛАЧХ над осью частот на частоте пересечения ЛФЧХ с осью (–π) – угол, на который нужно повернуть амплитудно-фазовую характеристику разомкнутой системы, чтобы замкнутая система оказалась на границе устойчивости. В данном случае запас по амплитуде 52.8 дБ.
Для удовлетворительной работы системы запас устойчивости по фазе должен составлять 30…400, по амплитуде - - 8..10 дБ. Следовательно, данная САР устойчива, а найденные величины запасов являются приемлемыми для системы.
2.3.4 А н а л и з к а ч е с т в а д и с к р е т н о й с и с т е м ы р е г у л и р о в а н и я :
а) прямые оценки качества. Показатели качества дискретных систем наиболее просто определяются по кривой переходного процесса, вызванного единичным ступенчатым воздействием.
z-изображение единичного ступенчатого воздействия 1(t):
![]() (18)
(18)
z-изображение
передаточной функции дискретной
замкнутой системы
![]() и z-изображение
её переходной функции H(z)
связаны между собой соотношением:
и z-изображение
её переходной функции H(z)
связаны между собой соотношением:
![]() , (19)
, (19)
где ![]() - выходной сигнал;
- выходной сигнал;
![]() - входной сигнал.
- входной сигнал.
Из соотношения (19) с учётом выражения (18) получим z-изображение переходной функции системы:
![]() (20)
(20)
Дискретные значения переходного процесса могут быть найдены путём разложения изображения переходной функции в ряд Лорана, которое реализуется простым делением числителя изображения переходной функции на её знаменатель в программе MATLAB.
Построим переходную характеристику дискретной замкнутой системы (рисунок 11).



Рисунок 11 – Переходная характеристика системы
Прямые оценки качества переходной характеристики:
- время регулирования tр
– это время, в течение которого выходная
величина достигает установившегося
значения hуст с
заданной точностью Δ. Обычно принимают
Δ=(0.01![]() 0.05)hуст,
то есть переходный процесс в системе
регулирования считают закончившимся,
когда переходная функция отличается
от своего установившегося значения не
более чем на 1 – 5%. Величина tр
характеризует быстродействие СУ: чем
меньше время регулирования, тем больше
быстродействие системы регулирования.
0.05)hуст,
то есть переходный процесс в системе
регулирования считают закончившимся,
когда переходная функция отличается
от своего установившегося значения не
более чем на 1 – 5%. Величина tр
характеризует быстродействие СУ: чем
меньше время регулирования, тем больше
быстродействие системы регулирования.
По графику hуст=0.00928
Вокруг hуст выделим область с допуском =5% от hуст:
=0.05. hуст=0.05.0.00928=0.000464
Тогда 5-процентный интервал отклонения от установившегося значения будет соответствовать следующим величинам.
![]()
![]()
По графику (11) определяем, время регулирования tр = 1.5 c.
- Перерегулирование (максимальная динамическая ошибка) σ – максимальное отклонение переходной функции от установившегося значения, выраженное процентах. Характеризует запас устойчивости СУ, под которым понимают степень удаления системы от колебательной границы устойчивости. Чем меньше σ, тем больше запас устойчивости, тем дальше удалена система от колебательной границы устойчивости.
![]()
Нулевое перерегулирование свидетельствует о большом запасе устойчивости системы от границы колебательности и высоком качестве управления.
б) Косвенные оценки качества. Косвенные оценки качества проводятся по частотным характеристикам. Наиболее часто используется амплитудно-частотная характеристика. (АЧХ) замкнутой системы.
Амплитудно-частотная функция определяется по формуле:
![]()
График АЧХ замкнутой системы приведен на рисунке .

Рисунок 11 – АЧХ системы
Косвенные оценки качества:
- показатель колебательности, определяемый по формуле:
![]() ,
,
где Amax – максимум АЧХ;
A(0) – значение амплитуды при нулевой частоте.
В данном случае Amax=A(0)=30. Тогда M=1 – переходный процесс протекает без колебаний по апериодическому закону.
- частота среза – частота, при которой АЧХ достигает значения, равного 1.
Частота среза косвенно характеризует быстродействие системы: чем больше часта среза, тем меньше время регулирования.
λср=0,8 рад/с
- резонансная частота – частота, в которой амплитудно-частотная функция достигает своего максимального значения:
λр=0
- полоса пропускания – интервал частот, в котором амплитуда АЧХ превышает уровень 0.707A(0).
0.707A(0)=0.707.87.1=61.579
3 РАЗРАБОТКА УПРАВЛЯЮЩЕЙ ПРОГРАММЫ
3.1 Алгоритм управляющей программы
Алгоритм — это точное предписание, определяющее процесс перехода от исходных данных к результату.
 Рисунок
12 – Алгоритм программы
Рисунок
12 – Алгоритм программы
После начала работы программы происходит проверка исходных данных. Исходными данными являются диапазоны изменения управляющего напряжения U и значения плотности рабочей жидкости ρ.
Далее программа производит чтение из com-порта значения ρ. Чтение и запись данных осуществляются с помощью программного модуля «Basic Driver for the RS232 port».
Расчет необходимого значения управляющего воздействия U производиться на основе данных, полученных экспериментальным путем. Формула для расчета управляющего воздействия приведена ниже.
U = ( Qз – Qф)·КUQ ,
где КUQ =
![]() =
0,04
=
0,04
Qф = ρ· КρQ – фактическая величина расхода;
Qз – заданная величина расхода.
Тогда получим:
U = ( Qз – ρ· КρQ)·КUQ ,
где КρQ =
![]() =
5
=
5
Для нахождения КUQ и КρQ использовались следующие зависимости:

Рисунок 13 – Зависимость управляющего воздействия U и расхода Q

Рисунок 14 – Зависимость расхода Q от плотности рабочей жидкости ρ
Полученное в результате расчета значение U записывается в com-порт. Далее программа циклично опрашивает com-порт, производит расчеты и запись результата.