

-
Линейные разностные уравнения с постоянными параметрами, их практическое значение и решение.
В общем случае линейное разностное уравнение с постоянными коэффициентами, относящееся к физически реализуемой системе, имеет следующий вид:

![]() (1.27)
(1.27)
где коэффициенты
![]() и
и
![]() являются постоянными величинами и
характеризуют конкретную систему.
являются постоянными величинами и
характеризуют конкретную систему.
Разностные уравнения для линейных дискретных систем играют ту же роль, что и дифференциальные уравнения для линейных аналоговых систем.
Как уже отмечалось, разностные уравнения позволяют определить способ построения соответствующей цифровой системы. Так, например, разностное уравнение первого порядка самого общего вида
![]() (1.28)
(1.28)
можно реализовать с помощью следующей схемы (рис. 1.14). Здесь
 Р
Р ис.
1.13. Реализация
линейной дискретной системы первого
порядка
ис.
1.13. Реализация
линейной дискретной системы первого
порядка
блок «задержка» осуществляет задержку последовательностей x(n) и y(n) на один отсчёт.
Разностное уравнение второго порядка общего вида
![]() (1.29)
(1.29)
реализуется схемой, представленной на рисунке 1.15.
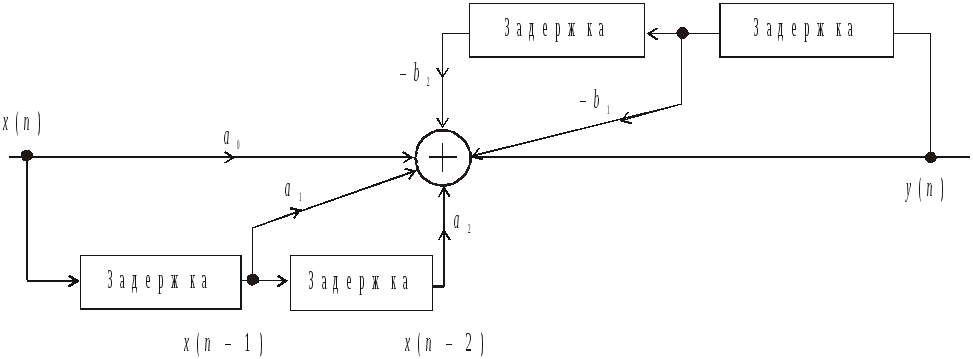
Рис. 1.14. Реализация линейной дискретной системы второго порядка
Очевидно, что рассмотренные системы первого и второго порядка могут быть использованы при реализации систем более высокого порядка путём последовательного или параллельного их соединения.
Наиболее подходящим способом решения линейных разностных уравнений является z-преобразование, которое позволяет заменить их решение решением алгебраических уравнений. Применение z-преобразования к разностным уравнениям аналогично применению преобразования Лапласа к дифференциальным уравнениям.
-
Z-преобразование и его основные свойства. Связь с преобразованием Фурье.
В общем случае z-преобразование X(z) последовательности x(n) определяется следующим образом:
 (1.30)
(1.30)
где z – комплексная переменная.
Функция X(z) определяется для тех значений z или z–1, для которых ряд в правой части выражения сходится. В этой связи следует отметить, что z-преобразование сходится не для всех последовательностей и не для всех значений z.
Представляя z в экспоненциальной форме
![]() (1.31)
(1.31)
из исходного выражения для z-преобразования получим:
 (1.32)
(1.32)
Из теории функций комплексной переменной известно, что функция X(z) определяется для тех значений z в z-плоскости, для которых
 (1.33)
(1.33)
Другими словами, исходная последовательность x(n) должна быть абсолютно суммируема.
Все значения z,
для которых выполняется данное условие,
образуют область сходимости z-преобразования
и в этой области значения X(z)
конечны. Область сходимости z-преобразования,
физически реализуемой последовательности
x(n),
для которой
![]() для
для
![]() расположена вне определённого круга
радиуса R
в z-плоскости.
Значение R
зависит от расположения полюсов функции
X(z)
[полюс (нуль) функции X(z)
расположен в точке z,
где
расположена вне определённого круга
радиуса R
в z-плоскости.
Значение R
зависит от расположения полюсов функции
X(z)
[полюс (нуль) функции X(z)
расположен в точке z,
где
![]() ].
Область сходимости можно также определить
и в z–1-
плоскости. В этом случае для физически
реализуемой последовательности область
сходимости z-преобразования
расположена внутри определённого круга
с радиусом
].
Область сходимости можно также определить
и в z–1-
плоскости. В этом случае для физически
реализуемой последовательности область
сходимости z-преобразования
расположена внутри определённого круга
с радиусом
![]()
Пример 1.1. Найти z-преобразование и область сходимости знакопостоянной экспоненциальной последовательности
где
![]()
Решение. По определению имеем:

Полученное выражение представляет собой сумму членов бесконечно убывающей геометрической прогрессии, которая определяется по формуле:
где в данном случае
![]() а знаменатель
а знаменатель
![]()
Таким образом,
![]()
Для определения области сходимости воспользуемся результатами, полученными выше.


Отсюда следует, что областью сходимости являются те значения z, для которых

Очевидно, что это условие выполняется тогда и только тогда, когда
Следовательно,
область сходимости последовательности
![]() в данном
случае представляет собой часть
z-плоскости
вне круга радиуса
в данном
случае представляет собой часть
z-плоскости
вне круга радиуса
![]() как показано на рисунке 1.15.
как показано на рисунке 1.15.
Из выражения для
X(z)
видно, что полюс X(z)
расположен в точке
![]() которая является границей области
сходимости. Из последнего выражения
видно также, что область сходимости
X(z)
в z–1-плоскости
лежит внутри круга с радиусом
которая является границей области
сходимости. Из последнего выражения
видно также, что область сходимости
X(z)
в z–1-плоскости
лежит внутри круга с радиусом
![]()
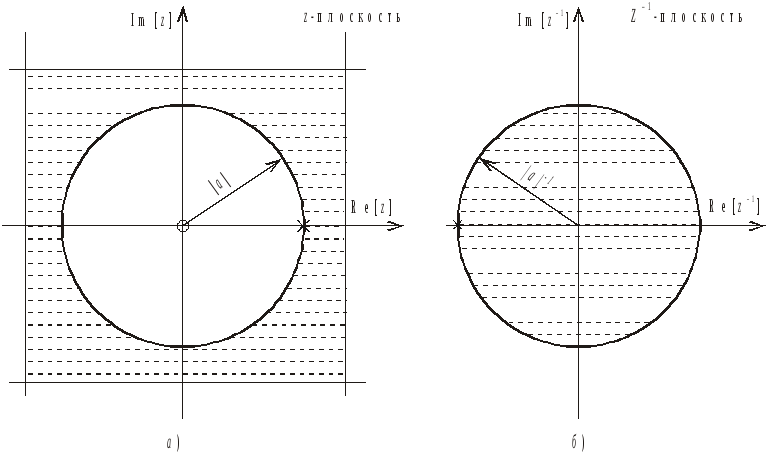
Рис. 1.16. Область сходимости экспоненциальной последовательности а) в z-плоскости; б) в z–1-плоскости
Рассмотрим основные свойства z-преобразования.
1. Линейность.
Если функции
![]() и
и
![]() есть z-преобразование
последовательностей
есть z-преобразование
последовательностей
![]() и
и
![]() соответственно, то для последовательности
соответственно, то для последовательности
![]() где a
и b
– произвольные постоянные, z-преобразование
определяется таким образом:
где a
и b
– произвольные постоянные, z-преобразование
определяется таким образом:
![]() (1.34)
(1.34)
2. Умножение на константу. Если X(z) есть z-преобразование X(n), то z-преобразование последовательности
![]()
где a – произвольная постоянная, определяется так:
![]() (1.35)
(1.35)
3. Умножение
на экспоненциальную последовательность.
Если
![]() имеет z-преобразование
X(z),
то z-преобразование
последовательности
имеет z-преобразование
X(z),
то z-преобразование
последовательности
![]() будет определяться как
будет определяться как
![]() (1.36)
(1.36)
4. Умножение
на
n(дифференцирование).
Если x(n)
имеет z-преобразование
X(z),
то последовательность
![]() будет иметь z-преобразование
будет иметь z-преобразование
![]() (1.37)
(1.37)
Это свойство полезно для вычисления обратного z -преобразования, когда X(z) содержит полюсы высокого порядка.
5. Сдвиг
(задержка).
Если последовательность
![]() имеет z-преобразование
имеет z-преобразование
![]() то для последовательности
то для последовательности
![]() z-преобразование
представляется в виде
z-преобразование
представляется в виде
![]() (1.38)
(1.38)
Множитель
![]() является оператором задержки дискретной
последовательности x(n)
на m
тактов (отсчетов) для любого m.
является оператором задержки дискретной
последовательности x(n)
на m
тактов (отсчетов) для любого m.
6. Свёртка.
Если
![]() и
и
![]() есть z-преобразование
последовательностей
есть z-преобразование
последовательностей
![]() и
и
![]() соответственно, то для последовательности
x(n),
являющейся их свёрткой, т. е.
соответственно, то для последовательности
x(n),
являющейся их свёрткой, т. е.

z-преобразование
определяется в виде произведения
z-преобразований
![]() и
и
![]()
![]() (1.39)
(1.39)
7. Задержка физически реализуемых последовательностей. Одностороннее z-преобразование. Свойства опережающего сдвига (упреждения).
При решении большинства практических задач обычно имеют дело с физически реализуемыми последовательностями, для которых вводится так называемое «одностороннее» z-преобразование:
 (1.40)
(1.40)
При этом
предполагается, что поведение
последовательности x(n)
до значения n
= 0 неизвестно и его можно не учитывать.
Для большинства таких последовательностей
свойства одностороннего z-преобразования
аналогичны свойствам обычного
z-преобразования.
Исключением является свойство сдвига
(задержки). Рассмотрим последовательность
![]() с односторонним z-преобразованием
с односторонним z-преобразованием
![]() и задержанную последовательность
и задержанную последовательность
![]() Одностороннее z-преобразование
Одностороннее z-преобразование
![]() равно
равно

Обозначим
![]() тогда
тогда
Последнее выражение можно переписать следующим образом:


![]() (1.41)
(1.41)
Как видно, задержка
на один отсчёт по-прежнему приводит к
умножению одностороннего z-преобразования
на
![]() но при этом необходимо учесть значения
последовательности
но при этом необходимо учесть значения
последовательности
![]() при
при
![]() т. е. в этом случае важную роль начинают
играть начальные условия.
т. е. в этом случае важную роль начинают
играть начальные условия.
Продолжая таким
образом рассуждения дальше, можно
получить, что z-преобразование
последовательности
![]() будет определяться таким образом:
будет определяться таким образом:
![]() (1.42)
(1.42)
Для случая задержки
последовательности на произвольное
число
![]() отсчётов
отсчётов
![]() можно получить следующую формулу:
можно получить следующую формулу:
![]()
![]() (1.43)
(1.43)
где
![]()
8. Свойство
сопряжения.
Если X(z)
есть z-преобразование
комплексной последовательности
![]() z-преобразование
последовательностей
z-преобразование
последовательностей
![]()
![]() и
и
![]() будут соответственно равны:
будут соответственно равны:
![]()
![]() и
и
![]() (1.44)
(1.44)
9. Обращение времени. Если X(z) есть z-преобразование последовательности x(n), z-преобразование последовательности x1(n)= x(–n) будет определяться таким образом:
 (1.45)
(1.45)
Для последовательности x2(n)= x*(–n) будет иметь
 (1.46)
(1.46)
10. Теорема
о начальном значении.
Если последовательность
![]() для всех n
< 0 (т. е. она является физически
реализуемой), а ее z-преобразование
есть X(z),
то
для всех n
< 0 (т. е. она является физически
реализуемой), а ее z-преобразование
есть X(z),
то
![]() (1.47)
(1.47)
Z-преобразование
последовательности можно рассматривать
как способ ее однозначного представления
в комплексной z-плоскости.
Вычислим Z-преобразование
последовательности x(n)
при
![]() Из равенства
Из равенства
следует
 (1.58)
(1.58)
Это выражение совпадает с выражением для преобразования Фурье исходной последовательности. Другими словами, преобразование Фурье является частным случаем z-преобразования, вычисленного на единичной окружности в z-плоскости.
Следует отметить, что единичная окружность в z-плоскости играет весьма важную роль. Например, имеются нереализуемые системы, такие как идеальный фильтр нижних частот или идеальный дифференциатор, z-преобразование которых сходится только на единичной окружности, т. е. эти системы имеют Фурье-преобразование, но не имеют z-преобразования.
Наконец,
необходимо отметить, что если все особые
точки
![]() расположены внутри круга единичного
радиуса на z-плоскости,
то система с соответствующей импульсной
характеристикой будет устойчивой.
расположены внутри круга единичного
радиуса на z-плоскости,
то система с соответствующей импульсной
характеристикой будет устойчивой.