

8.2 Форма модели косвенного контроля.
Сформируем следующую постановку задачи.
В пространстве ограниченного количества
измеряемых ИС параметров
![]() необходимо построить модель
необходимо построить модель
![]() и для упрощения этой процедуры рассмотрим
два вспомогательных вопроса: выбор
структуры (формы) модели
и для упрощения этой процедуры рассмотрим
два вспомогательных вопроса: выбор
структуры (формы) модели
![]() и критерия достоверности модели
и критерия достоверности модели
![]() .
.
Каким бы ни был вид функции
![]() ,
её нужно сконструировать таким образом,
чтобы неизвестные коэффициенты этой
функции относительно min
критериев достоверности модели
определялись простым путем.
,
её нужно сконструировать таким образом,
чтобы неизвестные коэффициенты этой
функции относительно min
критериев достоверности модели
определялись простым путем.
![]()
Чаще всего для этого используют суперпозицию типовых функций, например степенных:
![]()
Существует несколько возможных походов к решению поставленной задачи в зависимости от типа критерия достоверности:
![]() - неизвестный вектор
- неизвестный вектор
![]() определяется из решения вспомогательной
системы линейных уравнений.
определяется из решения вспомогательной
системы линейных уравнений.
![]() - неизвестный вектор
- неизвестный вектор
![]() определяется путем решения вспомогательной
задачи линейного программирования.
определяется путем решения вспомогательной
задачи линейного программирования.
Использование критерия
![]() и формы модели
и формы модели
![]() по существу составляет основу хорошо
известного метода наименьших квадратов.
Задача построения модели осуществляется
в цикле: линейная модель
по существу составляет основу хорошо
известного метода наименьших квадратов.
Задача построения модели осуществляется
в цикле: линейная модель
![]() ,
квадратичная, кубическая и т.д., пока не
достигнем заданной точности:
,
квадратичная, кубическая и т.д., пока не
достигнем заданной точности:
![]()
Продемонстрируем метод наименьших квадратов на простом примере. Пусть ищется модель типа полинома степени m.
![]()
![]()
Искомые коэффициенты полинома определяются из условия:
Дифференцируя по
![]() и приравнивая значения всех производных
нулю, получим систему линейных уравнений
(переобозначим
и приравнивая значения всех производных
нулю, получим систему линейных уравнений
(переобозначим
![]() )
)
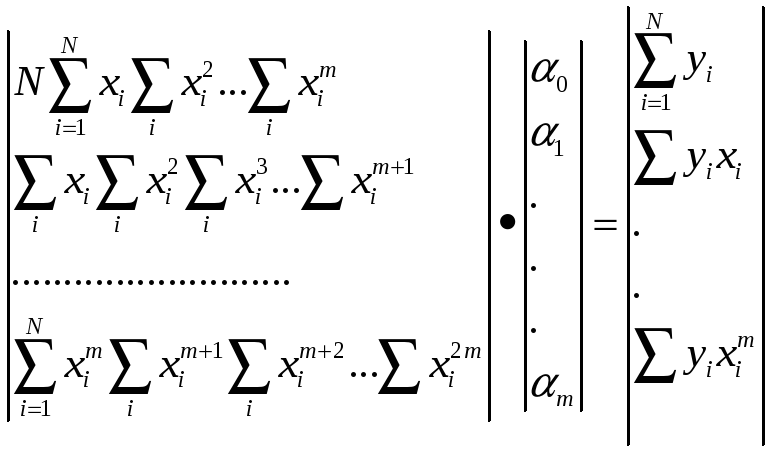
Для получения искомого вектора
![]() необходимо произвести обращение матрицы
одним из стандартных способов.
необходимо произвести обращение матрицы
одним из стандартных способов.
Заметим, что при другой форме модели
задачу минимизации
![]() и поиска вектора
и поиска вектора
![]() приходится решать поисковым методом
численной оптимизации, что значительно
сложнее. Поэтому её обычно решают в
интерактивном режиме, когда пользователь
имеет возможность варьировать форму
модели, число параметров, типы критериев,
методы оптимизации и т.д.
приходится решать поисковым методом
численной оптимизации, что значительно
сложнее. Поэтому её обычно решают в
интерактивном режиме, когда пользователь
имеет возможность варьировать форму
модели, число параметров, типы критериев,
методы оптимизации и т.д.
Погрешность модели косвенного контроля имеет три составляющие:
![]()
Составляющая погрешности измерения
![]() является взвешенной суммой погрешностей
отдельных измерений и вклада в модель
является взвешенной суммой погрешностей
отдельных измерений и вклада в модель
![]()
![]()
8.3. Компенсация и учёт динамики в системах косвенного контроля.
Главная причина динамической погрешности
![]() заключается в том, что искомый показатель
и измеренный показатель находятся в
разных пространствах измерений.
заключается в том, что искомый показатель
и измеренный показатель находятся в
разных пространствах измерений.
Различают следующие методы компенсации динамической погрешности:
1) Учет запаздывания
- Введение запаздывания
![]() , где
, где
![]() – взаимно-корреляционная функция:
– взаимно-корреляционная функция:
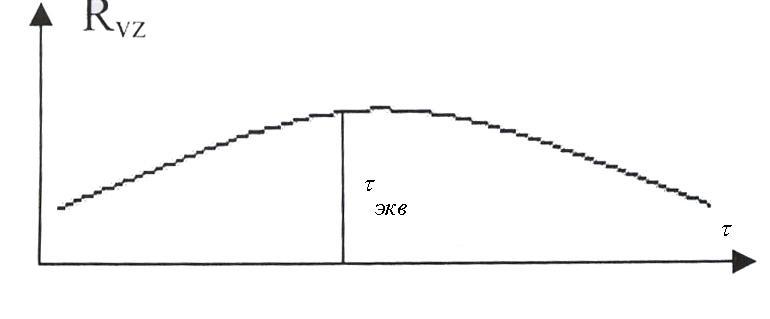
Для заданной дискретности измерений
![]() имеем соответствие:
имеем соответствие:
![]() .Тогда, для каждого
.Тогда, для каждого
![]() используем значение
используем значение
![]() ,
относительно которого строится модель.
,
относительно которого строится модель.
- коррекция параметров запаздывания за
счет вычисления коэффициентов веса
![]() линейной формы:
линейной формы:
![]()
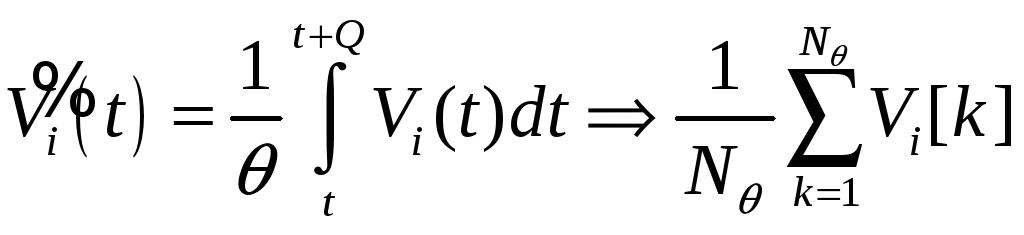
2) Эквивалентное интегрирование
- замена текущего значения
![]() его средним значением (интегралом) на
интервале
его средним значением (интегралом) на
интервале
![]() ,
чаще всего выбирается простейшая форма
– скользящее среднее
,
чаще всего выбирается простейшая форма
– скользящее среднее
- коррекция параметров интегратора в линейной форме
3) Одновременное введение запаздывания и скользящего среднего:
Как и ранее, результат компенсации динамики может быть улучшен в линейной форме трансформации измерений:
Заметим, что значения
![]() и Q являются разными для
разных показателей
и Q являются разными для
разных показателей
![]() пространства измерений, так же как и
коэффициенты линейных форм
пространства измерений, так же как и
коэффициенты линейных форм
![]() .
Процесс определения всех этих параметров
систем компенсации динамики стремятся
формализовать и упростить разными
вспомогательными приемами, но принципиально
они остаются неизменными: запаздывание,
усреднение, линейные формы [6].
.
Процесс определения всех этих параметров
систем компенсации динамики стремятся
формализовать и упростить разными
вспомогательными приемами, но принципиально
они остаются неизменными: запаздывание,
усреднение, линейные формы [6].