

Глава 8. Построение моделей косвенного контроля.
Будем, без потери общности, рассматривать следующую структуру, которая характерна для задач управления качеством (см. гл. 6).
![]()
![]()
Объект

![]()



![]()

![]()

УВМ
![]()
модель



Здесь нам через ИС доступны для измерения
часть параметров на входе, выходе и в
промежуточных точках, включая управление,
т.е. пространство измерений
![]() .
Необходимо построить модель, которая
с позиций некоторого критерия идентификация
.
Необходимо построить модель, которая
с позиций некоторого критерия идентификация
![]() была бы как можно ближе к недоступному
для непосредственного контроля вектору
состояний
была бы как можно ближе к недоступному
для непосредственного контроля вектору
состояний
![]() .
В частности это могут некоторые показатели
качества, количество которых [Z]
обычно невелико – от 1 до 3 (5). Тогда
искомая модель
.
В частности это могут некоторые показатели
качества, количество которых [Z]
обычно невелико – от 1 до 3 (5). Тогда
искомая модель
![]() должна давать оценку истинного значения
должна давать оценку истинного значения
![]() с некоторой погрешностью
с некоторой погрешностью
![]() ,
или иначе
,
или иначе
![]() ,
где
,
где
![]() – суммарная погрешность, которая
обусловлена погрешностью измерений и
погрешностью, связанной с динамическими
свойствами объекта:
– суммарная погрешность, которая
обусловлена погрешностью измерений и
погрешностью, связанной с динамическими
свойствами объекта:
![]() .
.
8.1. Особенности построения модели косвенного контроля.
I этап: выбор измеряемого пространства.
Обычно на I этапе желательно, чтобы пространство измерений содержало max 40-50 измеряемых параметров.
II этап: профессиональный анализ.
Здесь количество параметров может быть частично уменьшено (до 25-30) либо изменено за счет каких-либо профессиональных знаний (технолога, специалиста по управлению, менеджеров среднего звена).
III этап: редукция пространства измерений.
Обычно используется два подхода: 1) нелинейные функциональные преобразования; 2) статистическая линеаризация пространства измерений. Рассмотрим эти подходы отдельно, хотя, конечно, их можно использовать одновременно.
3.1 Идея функциональных преобразований сводится к тому, что предварительно вычисляются некоторые соотношения измеряемых параметров для последующего использования в модели. Формально, модель в пространстве таких “обобщенных” измерений будет содержать меньше переменных. Примеры таких функциональных соотношений:
![]()
Иногда используются для этих целей т.н. инварианты, которые известны в данной предметной области, например для механических систем часто используется такой показатель, как Re – число Рейнольдса:
![]()
где
![]() – скорость,
– скорость,
![]() - линейный размер,
- линейный размер,
![]() - вязкость (кинематическая).
- вязкость (кинематическая).
Подобные инварианты известны в разных предметных областях (теплотехнике, химической технологии, электромеханике): Nu,Pe,Prl,Da … и их использование было особенно характерно для “докомпьютерной” эры моделирования. В последнее время поиском таких соотношений стали вновь активно заниматься (синергетический подход).
8.2 Статистический анализ объекта
Статистический анализ обычно проводят в одной из форм: - активный эксперимент для выявления параметров с наибольшим влиянием на искомый показатель в области его экстремального значения; - пассивный эксперимент, для которого характерно длительное наблюдение за системой (объектом) без вмешательства в нормальный ход его функционирования.
На время статистического эксперимента необходимо организовать достаточно частое измерение показателей качества. (Чаще чем обычно в 4-5 раз). Полученные данные обрабатываются статистическими методами и получаются математические ожидания, дисперсии и другие статистические характеристики.
![]()
[N]=200-300 наблюдений.
Интервал наблюдений
![]() обычно находится из корреляционных
функций выходных координат.
обычно находится из корреляционных
функций выходных координат.
Пусть
![]() – это то, что определяет пространство
измерений в k-тый момент
времени. С использованием измеренных
во время эксперимента
– это то, что определяет пространство
измерений в k-тый момент
времени. С использованием измеренных
во время эксперимента
![]() показателей качества с той же частотой
измерения, вычисляем для всего множества
наблюдений k=1,N
статистические характеристики. Если
измеряется один показатель
показателей качества с той же частотой
измерения, вычисляем для всего множества
наблюдений k=1,N
статистические характеристики. Если
измеряется один показатель
![]() ,
то тогда:
,
то тогда:
1) Коэффициенты взаимной корреляции для
Z и
![]() составляют вектор:
составляют вектор:
![]()
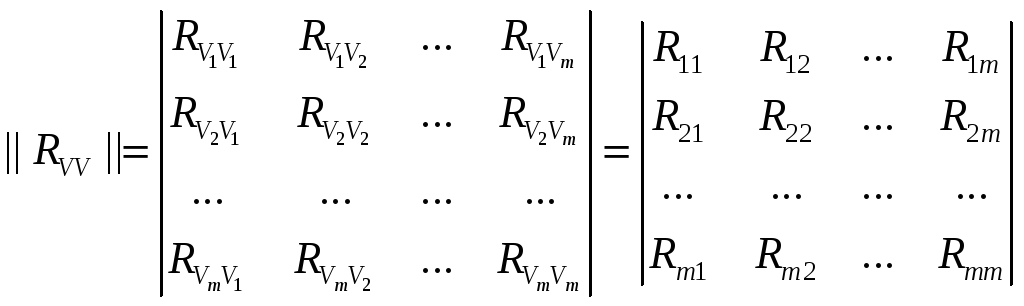
2) Коэффициенты корреляции всех измерений
![]() между собой составляют матрицу
между собой составляют матрицу
![]() :
:
Редукция сводится к работе двух фильтров:
1 фильтр (убирает параметры
![]() ,
слабо влияющие на искомый z)
работает по следующему принципу:
,
слабо влияющие на искомый z)
работает по следующему принципу:
- если
![]() ,
то отбрасывается измеряемый параметр
,
то отбрасывается измеряемый параметр
![]() .
Обычно выбирают
.
Обычно выбирают
![]()
2 фильтр (убирает дублирующие, сильно
связанные между собой параметры) путем
сравнения с порогом
![]() :
:
- если
![]() , то отбрасывается тот из этой пары,
который слабее влияет на z,
т.е. тот для которого выполняется условие
, то отбрасывается тот из этой пары,
который слабее влияет на z,
т.е. тот для которого выполняется условие
![]() .
Обычно
.
Обычно
![]() =
0,8 - 0,9.
=
0,8 - 0,9.
Эту процедуру повторяют несколько раз,
варьируя значениями порогов обоих
фильтров (![]() и
и
![]() )
до получения искомого результата:
сокращения размерности [v]
до 10-15. Далее переходим к следующему
этапу - построению модели.
)
до получения искомого результата:
сокращения размерности [v]
до 10-15. Далее переходим к следующему
этапу - построению модели.