

3.3.3. Анализ замкнутой системы управления
Составим численную модель работы замкнутой системы управления , блок-схема которой представлена на рис. 3.10.

Рис. 3.10. Структурная схема системы управления.
Используя численное моделирование на ЭВМ замкнутой системы автоматического управления, могут быть построены графики переходных процессов.
4.Дискретные модели пространственных фильтров
Рассмотрим математический аппарат построения пространственных сканеров и пространственных фильтров. Пространственные сканеры позволяют обнаруживать пространственно-модулированные сигналы (путем пространственного сканирования) в распределенном входном воздействии, а пространственные фильтры выделяют из распределенного входного воздействия заданные пространственные моды (магистрали).
4.1. Математическая модель одномерного пространственного сканера
Положим, что имеется распределенный объект (см. рис.4.1), математическая модель которого описывается уравнением
![]() ,
(4.1)
,
(4.1)
( 0<z<ZL, 0<x<XL),
где А– заданное число, x,z – пространственные координаты, t – время,
Т(x,z,τ)-фазовая переменная, XL,ZL-заданные величины.
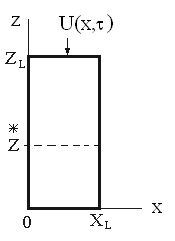
Рис.4.1. Схема распределенного объекта
Граничные условия заданы в виде следующих соотношений
![]() ,
(4.2)
,
(4.2)
![]() ,
(4.3)
,
(4.3)
![]() .
(4.4)
.
(4.4)
Положим, что входное воздействие представлено в виде ряда Фурье по пространственной координате, которое, с учетом граничного условия (4.2) записывается в виде
![]() ,
(4.5)
,
(4.5)
![]() ,
(4.6)
,
(4.6)
![]() -заданные функции
(несущие информацию о полезном сигнале).
-заданные функции
(несущие информацию о полезном сигнале).
Требуется определить
![]() (
(![]() -заданное
число
-заданное
число
![]() ).
).
Реакцию объекта на каждую моду входного воздействия (4.5) будем определять в виде:
![]() ,
(4.7)
,
(4.7)
где Hi(z,τ) – определяемые функции.
Подставляя (4.7) в (4.1) и преобразуя, получим
![]() ,
,
или
![]() (4.8)
(4.8)
Функцию
![]() будем искать в виде:
будем искать в виде:
![]() (4.9)
(4.9)
где
![]() ,
B1,i
, B2,i
-функции,
определяемые из граничных условий.
,
B1,i
, B2,i
-функции,
определяемые из граничных условий.
Подставляя (4.9) в (4.7) и далее в (4.4) , придем к следующему соотношению
![]() ,
или
,
или
![]() .
(4.10)
.
(4.10)
Подставляя (4.9) в (4.7) и далее в (4.3) получим
![]()
Значение B1,i определяется из следующего соотношения
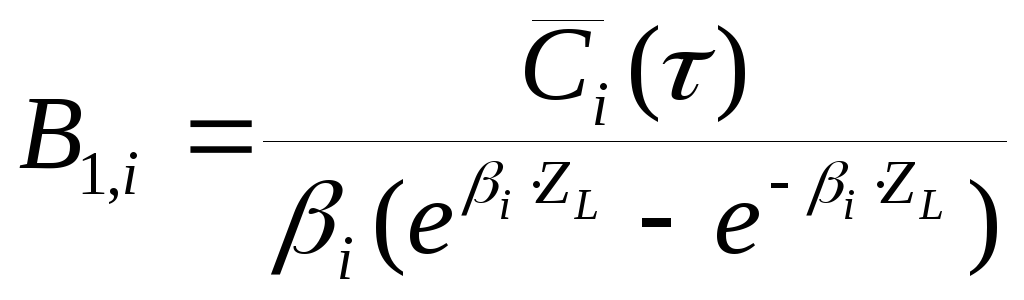 (4.11)
(4.11)
Реакция объекта на каждую моду входного воздействия может быть записана в виде:
 (4.12)
(4.12)
Функция выхода рассматриваемого объекта определяется из следующего соотношения
 (4.13)
(4.13)
Коэффициент
передачи (Кi=
Ti
(x,![]() ,τ)/(
,τ)/(![]() ×sin(Yi×x)))
по каждой пространственной моде
определяется из следующего соотношения
×sin(Yi×x)))
по каждой пространственной моде
определяется из следующего соотношения
 , (i=
, (i=![]() ),
(4.14)
),
(4.14)
где
![]() .
.
Положим, что A=1/G,
где G
непрерывна функция, пробегающая все
значения Ψ2i
, (i=![]() )
(в п.3 эта
функция названа обобщенной координатой).
Для значений
G
→Ψ2i
, (i=
)
(в п.3 эта
функция названа обобщенной координатой).
Для значений
G
→Ψ2i
, (i=![]() )
)
![]() а
значение abs(
Кi)→∞
(см. рис.4.2).
а
значение abs(
Кi)→∞
(см. рис.4.2).
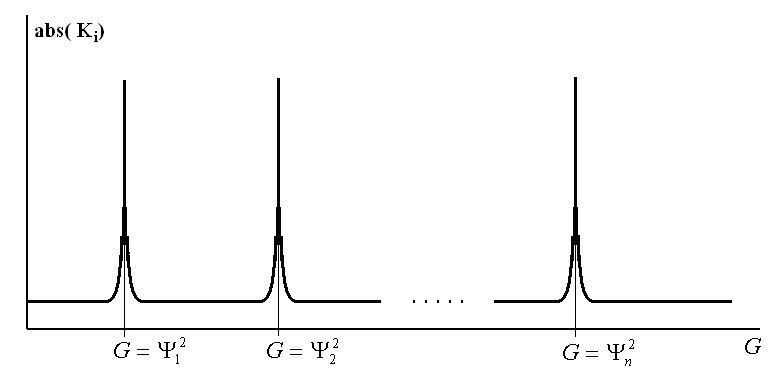
Рис.4.2. График коэффициента передачи
Уравнения
(4.1)-(4.4)
описывают модель одномерного
пространственного сканера,
коэффициент передачи по каждой
пространственной моде которого
определяется из соотношения (4.14). Если
входное воздействие представлено в
виде (4.5), то изменяя в (4.14) значение А от
0 до ∞, могут быть определены пространственные
частоты (Ψ2i
) пространственных мод, формирующих
входное воздействие
![]() .
.