

15. Таблица потоков. Информация в таблице потоков
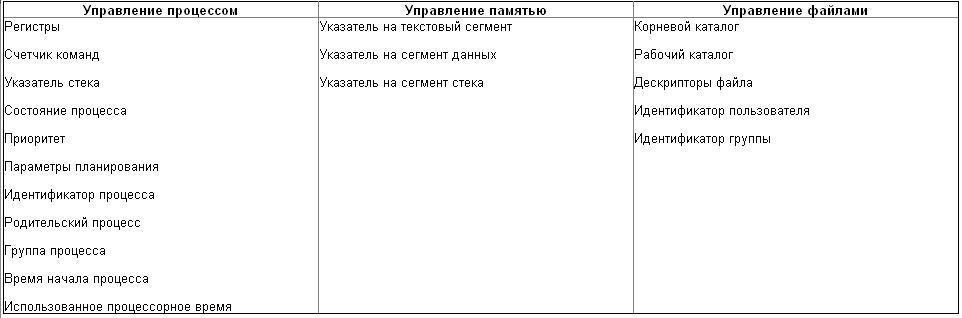
Во многих операционных системах вся информация о каждом процессе, дополнительная к содержимому его собственного адресного пространства, хранится в таблице процессов операционной системы.
Некоторые поля таблицы:
16. Алгоритмы планирования: fifo.
FIFO — акроним First In, First Out («первым пришёл — первым ушёл», англ. ), абстрактное понятие в способах организации и манипулирования данными относительно времени и приоритетов. Это выражение описывает принцип технической обработки очереди или обслуживания конфликтных требований путём упорядочения процесса по принципу: «первым пришёл — первым обслужен» (ПППО). Тот, кто приходит первым, тот и обслуживается первым, пришедший следующим ждёт, пока обслуживание первого не будет закончено, и т.д.
17. Алгоритмы планирования: «кратчайшая задача – первая»
Кратчайшая задача-первая. Т.е. предполагается, что временные отрезки работы известны заранее. Если в очереди есть несколько одинаково важных задач, планировщик выбирает первой самую короткую. Пусть есть 4 задачи: А,В,С,Д.(8,4,4,4-время их выполнения). Если мы их запустим в порядке А,В,С,Д - то среднее время = 14. А, если их запустим в порядке В,С,Д,А - то ср.время = 11
18. Алгоритмы планирования: приоритетное планирование.
Алгоритмы SJF и гарантированного планирования представляют собой частные случаи приоритетного планирования. При приоритетном планировании каждому процессу присваивается определенное числовое значение — приоритет, в соответствии с которым ему выделяется процессор. Процессы с одинаковыми приоритетами планируются в порядке FCFS. Для алгоритма SJF в качестве такого приоритета выступает оценка продолжительности следующего CPU burst. Чем меньше значение этой оценки, тем более высокий приоритет имеет процесс. Для алгоритма гарантированного планирования приоритетом служит вычисленный коэффициент справедливости. Чем он меньше, тем больше приоритет у процесса.
19. Алгоритмы планирования: планирование в системах реального времени.
Большинство ОСРВ (Операционные Системы Реального Времени) выполняют планирование задач, руководствуясь следующей схемой.[8] Каждой задаче в приложении ставится в соответствие некоторый приоритет. Чем больше приоритет, тем выше должна быть реактивность задачи. Высокая реактивность достигается путём реализации подхода приоритетного вытесняющего планирования (preemptive priority scheduling), суть которого заключается в том, что планировщику разрешается останавливать выполнение любой задачи в произвольный момент времени, если установлено, что другая задача должна быть запущена незамедлительно.
20. Функция создания процесса CreateProcess()
Функция CreateProcess создает новый процесс и его первичный (главный) поток. Новый процесс запускает заданный исполняемый файл в контексте безопасности вызывающего процесса.Если вызывающий процесс представляет другого пользователя, новый процесс использует маркер доступа для вызывающего процесса, а не маркер заимствования прав.