

Графический метод решения задачи линейного программирования.
Графический метод основан на геометрической интерпретации задачи линекйного программирования и применяется в основном при решении задач двумерного пространства. Пусть задача линейного программирования задана в двумерном пространстве, т. е. ограничениясодержат две переменные.
Найти минимальное значение функции
Z=C1x1+ C2x2 (2.55)
при условиях
 (2.56)
(2.56)
õ10, õ20. (2.57)
Допустим, что система (2.56) при условии (2.57) совместна и ее многоугольник решений ограничен. Каждое из неравенств (2.56) и (2.57) определяет полуплоскость с граничной прямой ai1x1+ai2x2=b (i=1, 2, ..., m), x1=0, x2=0. Линейная функция (2.55) при фиксированных значениях Z является уравнением прямой линии C1х1+ C2x2=const. Построим многоугольник решений системы ограничений (2.56) и график линейной функции (2.55) при Z = 0 (рис.2.6). Тогда поставленной задаче линейного программирования можно дать следующую интерпретацию. Найти точку многоугольника решений, в которой прямая C1х 1+ C2x2=const — опорная и функция Z при этом достигает минимума.

Из рис.2.6 следует, что прямая дважды становится опорной по отношению к многоугольнику решений (в точках A и C, причем минимальное значение принимает в точке А. Координаты точки А (х1; х2) находим, решая систему уравнений прямых АВ и АЕ.
При нахождении решения задачи (2.55)—(2.57) могут встретиться случаи, изображенные на рис. 2.7—2.10. Рис. 2.7 характеризует случай, когда целевая функция принимаетминимальное значение в единственной точке А. Из рис. 2.8 видно, что минимальное значение целевая функция принимает в любой точке отрезка АВ. На рис. 2.9 изображен случай, когда целевая функция не ограничена снизу на множестве допустимых решений, а на рис. 2.10 — случай, когда система ограничений задачи несовместна.

рис.2.7
рис.2.8



рис.2.9
рис.2.10
Отметим, что нахождение максимального значения отличается от нахождения минимального значения при тех же ограничениях лишьтем, что линия C1х1+C2x2=const передвигается не в направлении вектора N, а в противоположном направлении.
Итак, нахождение решения задачи линейного программирования (2.55)—(2.57) на основе ее геометрической интерпретации включает следующие этапы:
1. Строят прямые, уравнения которых получаются в результате замены в ограничениях (2.56) и (2.57) знаков неравенств на знаки точных равенств.
2. Находят полуплоскости, определяемые каждым из ограничений задачи.
3. Находят многоугольник решений.
4. Строят вектор N(C1;C2),
5. Строят прямую C1х1+ C2x2=const.
6. Передвигают эту прямую в направлении вектора N, в результате чего либо находят точку (точки), в которой целевая функция принимает минимальное значение, либо устанавливают неограниченность снизу функции на множестве планов.
7. Определяют координаты точки минимума функции на множестве планов.
П р и м е р 1. Задача использования сырья. Найти максимальное значение функции Z=50x1+40x2 при условиях

Р е ш е н и е. Построим многоугольник решений (рис.2.11). Для этого в системе x1Ox2 на плоскости изобразим граничные прямые
2x1+5x2=20,
8x1+5x2=40,
5x1+6x2=30,
x1=0, x2=0.
Взяв какую-нибудь точку, например, начало координат, установим, какую полуплоскость определяет оответствующее неравенство. Многоугольником решений данной задачи является ограниченный пятиугольник OABCD.
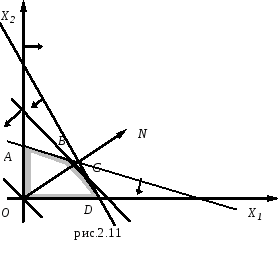
![]()
Оптимальный план задачи: х1=90/233.9, х2=40/231.7. Подставляя значения х1 и х2 в линейную функцию, получаем Zmax=503.9+401.7260.3.
Таким образом, для того чтобы получить максимальную прибыль в размере 260.3 руб., необходимо запланировать производство 3.9. ед. продукции А1 и 1.7 ед. продукции А2.