

Лабораторные работы / ЛСУ _3
.docxБАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ИНЖИНЕРНО-СТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
Лабораторная работа № 3
по дисциплине:
Локальные системы управления
СИСТЕМА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ
ПЛАТФОРМЫ («ВЕРТОЛЁТ»)
Выполнил:
Студент группы УИТ-51
Агабалаев А.В.
Проверила:
Комлева О.А.
Балаково 2008
Вариант №2
Цель работы:
1. Изучение возможных принципов построения системы управления положением механического объекта.
2. Исследование одноконтурной системы регулирования углового положения платформы, расчет и реализация возможных вариантов корректирующих устройств.
3. Определение качественных показателей работы одноконтурной системы регулирования углового положения платформы для различных вариантов структурной организации.
4. Изучение принципов построения системы подчиненного (многоконтурного) регулирования положения платформы.
5. Ознакомление с принципами расчета регуляторов отдельных контуров системы подчиненного регулирования.
6. Аналитический расчет и экспериментальное определение статических и динамических характеристик системы подчиненного регулирования положения механического объекта.
Структурная схема одноконтурной системы регулирования с последовательной интегро-дифференцирующей RC-цепью (ПКЦ), представлена на рис.1:

Рисунок 1 – Структурная схема одноконтурной системы управления
Передаточная функция поворотной платформы (Пл):

Передаточная функция электродвигателя постоянного тока имеет вид:
 ,
,
где
 ,
рад/(В·с);
,
рад/(В·с);
 ,
с;
,
с;
 ,
с.
,
с.
В работе используется трехкаскадный усилитель постоянного тока (УПТ), его передаточная функция:
 ,
где
,
где
 ;
;
 ,
с.
,
с.
Пропеллер имеет сложную нелинейную характеристику, передаточная функция которого принимается в виде безинерционного звена:
 ,
,
где
 – коэффициент передачи пропеллера;
– коэффициент передачи пропеллера;
 ,
Н·с/рад.
,
Н·с/рад.
Потенциометрический датчик (ПОС) для измерения углового положения платформы зафиксирован на оси, вокруг которого вращается платформа, и имеет передаточную функцию следующего вида:
 ,
,
где
 ,
В/град = 16, В/рад;
,
В/град = 16, В/рад;
 – напряжение
питания датчика;
– напряжение
питания датчика;
 ,
В;
,
В;
α –
рабочий диапазон;
 .
.
Структурная схема трехконтурной системы подчиненного регулирования углового положения поворотной платформы представлена на рис.2:
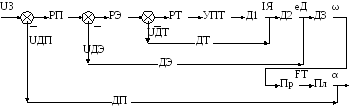
УПТ – усилитель постоянного тока; Д1, Д2, ДЗ – двигатель; Пр – пропеллер; Пл – платформа; ДТ – датчик тока; ДЭ – датчик ЭДС; ДП – датчик положения; РТ – регулятор тока; РЭ – регулятор ЭДС; РП – регулятор положения; IЯ – ток якоря; eД – ЭДС двигателя; ω – скорости вращения вала двигателя.
Рисунок 2 – Структурная схема системы подчиненного регулирования
Передаточные функции двигателя имеют вид:
 ,
,
 ,
,
 ,
,
где
 – полное сопротивление якорной цепи;
– полное сопротивление якорной цепи;
 –
добавочное
сопротивление в якорной цепи для
реализации обратной связи по току;
–
добавочное
сопротивление в якорной цепи для
реализации обратной связи по току;
 ,
Ом.
,
Ом.
Некомпенсируемая малая постоянная времени контура тока равна некомпенсируемой частью контура тока(усилителя) является усилитель, имеющий малой постоянной времени, т.е. Тμ= Ту.
Передаточная функция разомкнутого контура:

Передаточная функция регулятора тока:

 ,
,
где
 – коэффициент передачи регулятора
тока.
– коэффициент передачи регулятора
тока.
Передаточная функция замкнутого контура тока:

Передаточная функция датчика ЭДС:
 ,
,
где
 .
.
Для этого контура
некомпенсируемой малой постоянной
является сумма малых постоянных
замкнутого контура тока 2Гу и датчика
ЭДС, равная якорной постоянной
двигателя ТЯ, т.е.
 =2·Ту
+ ТЯ.
=2·Ту
+ ТЯ.
При настройке на модульный оптимум передаточная функция разомкнутого контура ЭДС:

С другой стороны:

Выразим передаточную функцию регулятора ЭДС:


Учитывая, что
 =2·Ту
+ ТЯ, передаточная функция регулятора
ЭДС будет иметь вид:
=2·Ту
+ ТЯ, передаточная функция регулятора
ЭДС будет иметь вид:

где
 – коэффициент передачи регулятора ЭДС.
– коэффициент передачи регулятора ЭДС.
Передаточная функция замкнутого контура ЭДС:

Таким образом,
малая постоянная времени контура
положения есть 2 ,
и тогда передаточная функция разомкнутого
контура положения:
,
и тогда передаточная функция разомкнутого
контура положения:


Выразим передаточную функцию регулятора положения:

где
 – коэффициент передачи регулятора
положения.
– коэффициент передачи регулятора
положения.
Коэффициент передачи регулятора тока:

где kУ – коэффициент передачи усилителя.
 ,
кОм
,
кОм
Поскольку постоянная
времени регулятора, равная ТЯ,
не изменяется, значения сопротивления
 и емкости Ст
выбраны в
соответствии с:
и емкости Ст
выбраны в
соответствии с:
 ,
с.
,
с.
Для регулятора положения имеем:
 ,
,
где
 – при принятых допущениях величина
постоянная.
– при принятых допущениях величина
постоянная.
В соответствии со схемой регулятора положения имеем:



Значения R1 и R2 определяются следующими соотношениями:
 ,
,

Значение сопротивления R4 выбрано в соответствии с выражением:

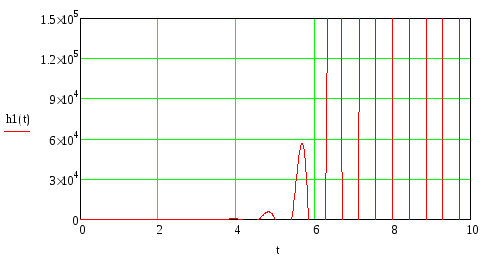
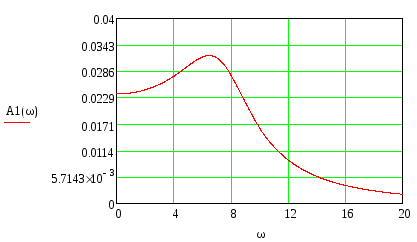
Одноконтурная система
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()

Трёхконтурная система
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()

Сравнение систем

![]()
![]()
![]()
![]()
![]()

![]()
![]()

![]()

![]()

Вывод: в ходе лабораторной работали исследовали одноконтурную системы регулирования с последовательной интегро-дифференцирующей RC-цепью и трехконтурную систему подчиненного регулирования углового положения поворотной платформы, посчитали общие передаточные функции и построили графики переходного процесса и АЧХ. Из графиков переходных процессов видно, что одноконтурная система имеет расходящийся процесс, т.е. система неустойчива, а трёхконтурная система – сходящийся процесс, т.е. система устойчива.