

Лабораторные работы / LABA2LSU
.doc
 БАЛАКОВСКИЙ
ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И
УПРАВЛЕНИЯ
БАЛАКОВСКИЙ
ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И
УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
ПРАКТИЧЕСКАЯ РАБОТА №2
по дисциплине
Локальные системы управления
Выполнил ст. гр. УИТ-51
Тужилкин И.В.
Принял
Ефремова Т.А.__________
«____» _____________2004г.
2004
Вариант 27
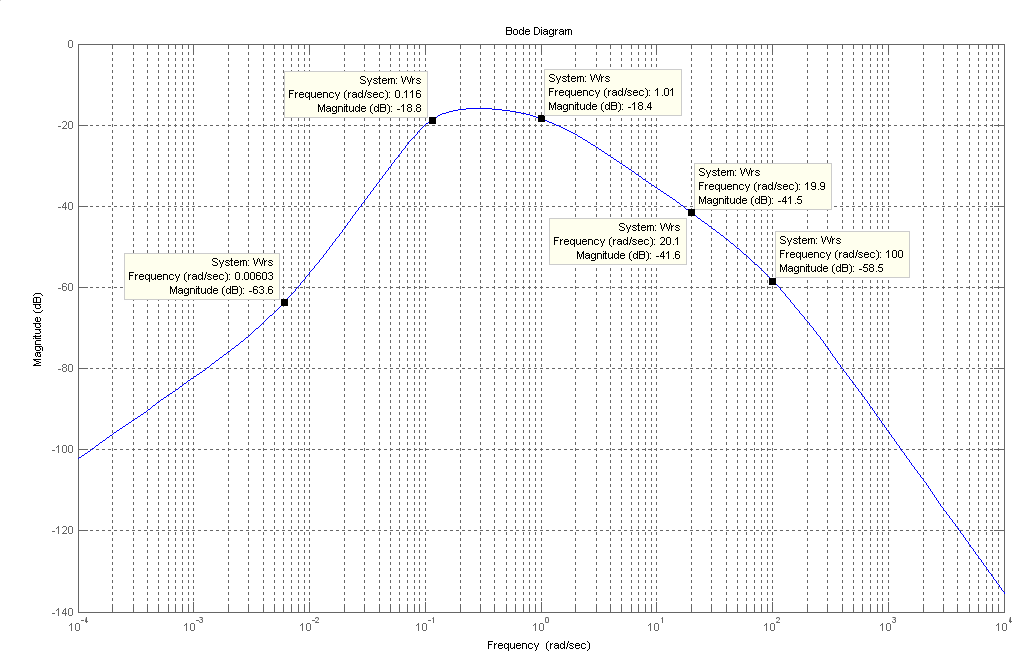
Передаточная функция непрерывной части системы (разомкнутой цепи) Wrs(s):

Wrs=zpk([-0.00604 -20.04 0],[-100 -20 -1 -0.0833+0.0804i -0.0833-0.0804i],17.0383)
Zero/pole/gain:
17.0383 s (s+0.00604) (s+20.04)
----------------------------------------------
(s+100) (s+20) (s+1) (s^2 + 0.1666s + 0.0134)
То есть
WR=tf(Wrs)
Transfer function:
17.04 s^3 + 341.6 s^2 + 2.062 s
-------------------------------------------------------
s^5 + 121.2 s^4 + 2140 s^3 + 2355 s^2 + 361.6 s + 26.81
Перейдем от непрерывной модели объекта к дискретной с интервалом дискретизации 0.001 c, используя экстраполятор нулевого порядка, для этого воспользуемся в программе MATLAB функцией преобразования непрерывной модели системы в дискретную (с2d).
Ts=0.001;Wdis=c2d(WR,Ts,'zoh') , получим передаточную функцию разомкнутой дискретной системы:
Ts=0.1;Wdis=zpk(c2d(WR,Ts,'zoh'))
Zero/pole/gain:
0.014564 (z-1) (z-0.9994) (z-0.1348) (z+0.1057)
------------------------------------------------------------
(z-0.9048) (z-0.1353) (z-4.54e-005) (z^2 - 1.983z + 0.9835)
Sampling time: 0.1
Для
проверки качества выполненной
аппроксимации сравним частотные
характеристики исходной непрерывной
и полученной дискретной моделей,
изображенные на рисунке. ЛАЧХ дискретной
модели строится в зависимости от
псевдочастоты λ, при этом сначала
п![]() роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется
переход от W(ω) к частотному выражению
передаточной функции через псевдочастоту
λ путем замены ω=0.5Tsλj.
роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется
переход от W(ω) к частотному выражению
передаточной функции через псевдочастоту
λ путем замены ω=0.5Tsλj.
ltiview
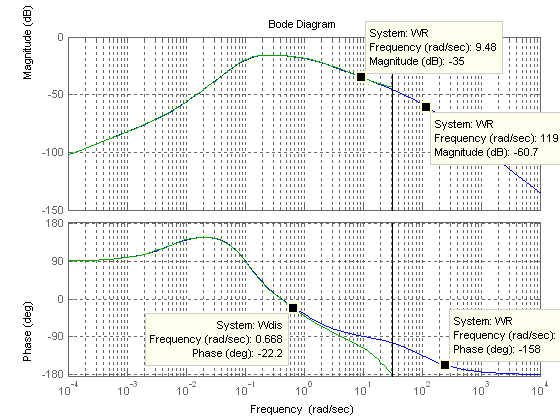
Из рисунка следует, что аппроксимация выполнена верно.
Построим желаемую ЛАЧХ методом запретной зоны.
Зададим скорость обработки сигнала:
g1=30
g1 =
30
Ускорение:
g11=100
g11 =
100
Максимальная ошибка регулирования:
e=0.5
e =
0.5000
Построение ЖЛАЧХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки РТ.
частота
рабочей точки
![]() (hm)
(hm)
hm=g11/g1
hm =
3.3333
hml=Log10(hm)
hml =
0.5229 рад
амплитуда рабочей точки A
Amax=5.13
Amax =
5.1300
A=Amax/e
A =
10.2600
Al=20*log10(A)
Al =
20.2229 дБ
Т.о., РТ(0.52; 20.22) – координаты рабочей точки.
Через найденную точку проводим прямую под наклоном -20 дБ/дек - асимптоту рабочей точки. Область, ограниченная координатными осями и полученной прямой, является запретной зоной.
Зададим время регулирование tp=11 c и величину перерегулирования σ=30%,колебательности (М=1.3), тогда, согласно номограмме Солодовникова, Рмах составит 1.27, а частоту среза найдем из формулы:
![]()
![]()
Таким образом, ωср=1 рад/с.
Тогда![]() (hsr)
(hsr)
hsr=1/(0.1*0.5)
hsr =
20
hsrl=log10(hsr)
hsrl =
1.3010
Найденная
точка попадает в запретную зону.
Следовательно,
![]() необходимо сдвинуть вправо до пересечения
асимптоты рабочей точки с осью абсцисс.
необходимо сдвинуть вправо до пересечения
асимптоты рабочей точки с осью абсцисс.
Определим
графически краевую частоту, расположенную
правее
![]() - она является точкой пересечения
асимптоты рабочей точки и горизонтальной
прямой
- она является точкой пересечения
асимптоты рабочей точки и горизонтальной
прямой
M=1.3
M =
1.3000
hkr2=20*log10(M/(M+1))
hkr2 =
-4.9557 дБ
hkr1=20*log10(M/(M-1))
hkr1 =
12.7364 дБ
Правее
![]() ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ.
ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ.
0.52*1.04+20.22
ans =
20.7608
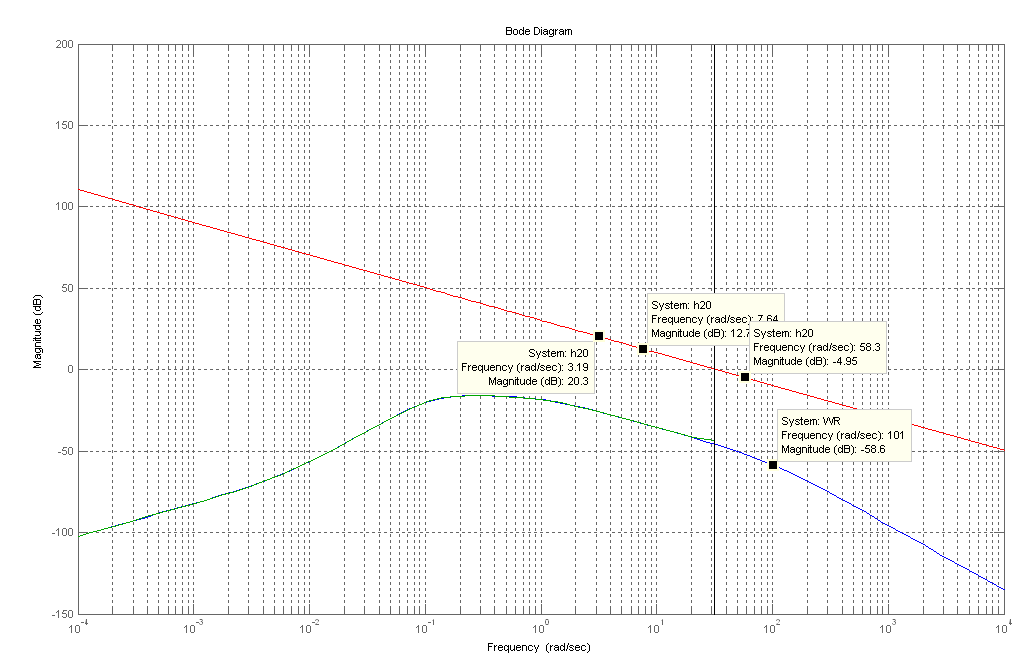
Построение запретной зоны
ЛАЧХ непрерывной части