

6. Программа для мп
Начало
Ввод программы изменения
во времени управляемого параметра,
вычисление требуемого текущего значения
да
Заданное значение -1
нет
Ввод реального текущего значения управляемого
параметра с датчика, преобразование его в
цифровой вид
Вычисление разности заданного и реального
значений управляемого параметра
да
Если разность равна нулю
нет
Программная коррекция
(домножение на коэффициент ошибки)
Преобразование цифрового управляющего сигнала
в аналоговый и выдача его в цепь управления
Конец
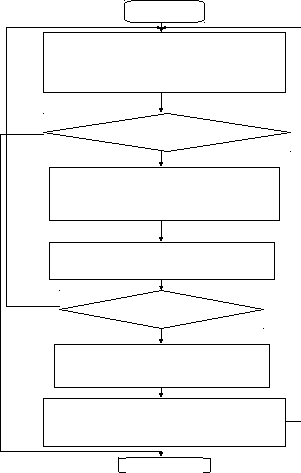
Рисунок 8 - блок-схема программы для МП.
Примечание: если система используется как в данной работе для регулирования и стабилизации уровня на одной отметке, то пункт программы «Ввод программы изменения во времени управляемого параметра, вычисление требуемого текущего значения» можно пропустить, а настройку системы осуществить при помощи регулирования положения датчика уровня и установки сигнала сельсин-датчика на нуль при заданном значении уровня жидкости так, чтобы сигнал с него и был сигналом рассогласования. При этом пункт «Вычисление разности заданного и реального значений управляемого параметра» также можно опустить. Поэтому в нижеприведенном тексте программы эти пункты подробно не рассматриваются и описываются в виде подпрограмм или процедур. Также подробно не рассматриваются процедуры аналого-цифрового и цифро-аналогового преобразования, так как они могут быть написаны только в системе команд конкретного МП.
Текст программы:
Program
Label 1,2;
Var x, y: real;
Procedure azp;{процедура АЦ-преобразования}
Procedure zap;{процедура ЦА-преобразования}
Procedure Xt;{процедура вычисления заданного значения в текущий
момент времени}
Begin
1: Xt(x); {обращение к процедуре вычисления заданного
значения}
if x=-1 then goto 2 {проверяем условие выхода из программы}
Readln(y);{ввод текущего значения параметра с датчика}
azp(y); {обращение к процедуре АЦ-преобразования
сигнала с датчика уровня}
y:=y-x;{вычисление сигнала рассогласования}
if y=0 then goto 1;{если рассогласования нет, то повтор}
y:=1.05964*y;{программная коррекция}
zap(y);{обращение к процедуре ЦА-преобразования
управляющего сигнала}
writeln(y);{выдача управляющего сигнала}
2:
end.
Данная программа написана как пример. Для конкретной реализации необходимо использовать систему команд конкретного МП, учитывающую особенности его архитектуры и функционирования.
Заключение
В микропроцессорных системах, в отличие от непрерывных систем корректировку и расчет управляющего воздействия производят с учетом дискретности и длины слова. С увеличением периода дискретности качество управления снижается вследствие:
1. Потери полезной информации в системе.
2. Вследствие генерации возмущающих воздействий в виде гармоник вследствие дискретизации.
Применение более быстродействующих МП приводит к усложнению МП, его удорожанию и не всегда приводит к нужным результатам.
Первоначальная не скорректированная система не удовлетворяла требованиям к качеству управления. Изменение параметров отдельных элементов не позволяло получить желаемого характера протекания переходного процесса. Включение корректирующего устройства улучшает качество переходного процесса и помогает достичь желаемых характеристик. Массогабаритные характеристики полученного регулятора также удовлетворяют требованиям ТЗ. Так как система астатическая, то в ней нет статической ошибки, а величина динамической ошибки удовлетворяет заданным требованиям ТЗ, следовательно, можно сделать вывод, что спроектированная система полностью отвечает требованиям ТЗ.
Список использованных источников
-
Егоров К. В. Основы теории автоматического регулирования. М.:Энергия, 1967.
-
Кошарский Е. Д. Автоматические приборы и регуляторы. М.: Машиностроение, 1964.
-
Топчеев Ю. М. Атлас для проектирования систем автоматического регулирования. М.: Машиностроение, 1989.
-
Кукушкин А. П. Гидравлические и пневматические системы автоматизации технологических процессов. Л.: ЛПИ.
-
Погорелов В. И. Элементы и системы гидро-пневмоавтоматики. Л.: ЛПИ, 1979.
-
Денисов А. А., Нагорный В. С. Пневматические и гидравлические устройства автоматики. М.: Высшая школа, 1978.
-
Денисов А. А., Нагорный В. С. Элементы электрогидравлических и электропневматических устройств автоматики. Л.: ЛПИ, 1975.
-
Иващенко Н. Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1978.
-
Топчеев Ю. И. Нелинейные системы автоматического управления. Дискретные нелинейные системы. М.: Машиностроение, 1982.
-
Хлюснев И. Н. Приборы АСУТП. М.: Машиностроение, 1982.
-
Хвощинский А. П. МП и микроЭВМ. М.: Высшая школа, 1982.
-
Чернов К. В., Кузьменко В. И. Детали машин. М.: Машиностроение, 1978.
-
Чурзин Р. В. Основы создания автоматических регуляторов. М.: Высшая школа, 1974.
-
Юревич Е. И. Теория автоматического управления. М.: Энергия, 1969.
 U
U дв
Q h
U
U дв
Q h
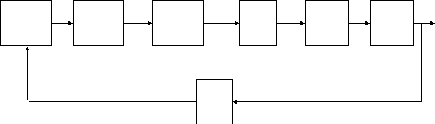
МП У ЭД Р З Б
ДУ
где:
МП – микропроцессор;
У – усилитель;
ЭД – электродвигатель;
Р – редуктор;
З – заслонка;
Б – бак;
ДУ – датчик уровня.
Рисунок 1 - структурная схема электрогидравлического регулятора уровня жидкости в рабочей емкости.
 U
U U дв
Q h
U
U U дв
Q h
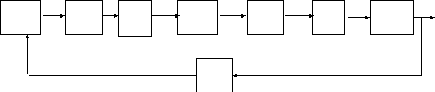
МП У КУ ЭД Р З Б
ДУ
a)
 U
U дв
Q h
U
U дв
Q h
МП У ЭД Р З Б
КУ ДУ
б)
Рисунок 7 - варианты установки корректирующего устройства КУ: а) последовательно; б) параллельно.