

1. Техническое задание
В качестве электрогидравлического регулятора был взят регулятор уровня жидкости в рабочей емкости (баке) при изменяющейся нагрузке (при изменениях расхода). Такие регуляторы широко применяются при автоматизации насосных установок, систем замкнутого кругооборота воды, различных системах контроля в добывающей, химической и топливно-энергетической промышленности [5].
Рассмотрим структурную схему регулятора (Рисунок 1):
М– микропроцессор – задает (программно) закон изменения во времени выходной величины - уровня рабочей жидкости в емкости, вычисляет отклонение (разницу) фактического значения уровня от заданного в данный момент времени и выдает электрический сигнал рассогласования U;
У – усилитель – усиливает мощность сигнала рассогласования с МП для использования его в качестве управляющего сигнала U;
ЭД – электродвигатель, преобразующий входной электрический управляющий сигнал U, в выходную механическую величину перемещения – угол поворота вала ЭД - дв;
Р – редуктор – изменяет и согласовывает скорость и момент на выходном валу для непосредственного управления рабочим органом;
З – заслонка – рабочий орган, регулирующий размер поперечного сечения трубопровода (опускаясь и поднимаясь), а, следовательно, и приток жидкости в рабочую емкость Q;
Б – бак – рабочая емкость, уровень жидкости h в которой подвергается изменению за счет изменения гидравлической нагрузки на выходе (расхода жидкости) и регулируется путем изменения входного потока Q;
ДУ – датчик уровня – преобразует уровень жидкости в рабочей емкости в пропорциональный электрический сигнал.
Параметры регулируемой системы:
-
давление питания на входе в емкость Р1 105 Па;
-
давление потребления на выходе из емкости Р2 2.105 Па;
-
максимальный расход рабочей жидкости Q 30 м3/с;
-
максимальная скорость изменения уровня жидкости не более 1,5 м/с;
-
максимальное ускорение изменения уровня жидкости не более 4,5 м/с2.
Требования к проектируемому регулятору:
-
время регулирования tp0.25 c;
-
колебательность М 1,3;
-
перерегулирование 30 – 40%;
-
максимально допустимое отклонение регулируемой величины в установившемся режиме 2%;
-
габариты без учета двигателя и заслонки (с учетом) не более 200.300.300 (400.500.500) мм;
-
масса без учета двигателя и заслонки (с учетом) не более 5 (15) кг;
-
потребляемая мощность измерительной цепи и МПБ не более 15 Вт.
2. Определение элементной базы и расчет передаточных функций выбранных элементов
2.1 Микропроцессор
Среди устройств автоматики наиболее широкое распространение получили МПК серий К580, К588, К1800. При выборе МПК кроме критериев технической, экономической и технико-экономической эффективности следует руководствоваться следующими соображениями:
-
допустимое время обработки информации;
-
высокая производительность МП, достаточный объем ОЗУ и ПЗУ;
-
возможность цифровой обработки аналоговых сигналов в реальном масштабе времени;
-
возможность программной коррекции;
-
малое энергопотребление;
-
совместимость с другими микросхемами;
-
доступность элементов;
-
достаточно мощная и гибкая система команд МП;
-
достаточно высокий уровень выходного сигнала ЦАП, для дальнейшего его использования без необходимости предварительного усиления;
-
наличие встроенных ЦАП и АЦП;
-
для сложных СУ также необходимо несколько каналов ввода-вывода информации.
На основании вышеперечисленных критериев выбор был остановлен на МП серии К1813ВЕ1 [10]. Это однокристальный МП цифровой обработки аналоговых сигналов в реальном масштабе времени, со встроенными аналоговыми системами ввода-вывода (ЦАП и АЦП), с 16-ти разрядным ПЗУ (емкостью 192х24 бит), ОЗУ (емкостью 40х25 слов), 25-ти разрядным ALU, четырьмя входными и восемью выходными аналоговыми каналами, разрешением 0,5% (8 двоичных разрядов и знак).
Этот МП выполнен по высококачественной n-МОП –технологии, совместим с БИС серии К580, высокой степени плотности – 29 тыс. транзисторов на кристалл. Реализована мощная и гибкая система команд с расширенными возможностями адресации памяти, аппаратная реализация процесса совмещения операций выполнения и выборки команд, упрощенное построение мультипроцессорных систем, структура с возможностью наращивания, аппаратная реализация взаимодействия нескольких процессов и микропрограммное управление.
Выбранный микропроцессор обладает необходимой произво-дительностью, мощной и гибкой системой команд и управления обработкой информации, возможностью программной коррекции ЛСУ, совместим с БИС, имеет возможность обрабатывать аналоговый сигнал в режиме реального времени, благодаря встроенным АЦП и ЦАП и доступен.
Энергопотребление МПК можно принять допустимым, учитывая потребляемую мощность встроенных ЦАП и АЦП (суммарная мощность МПК с отдельными микросхемами ввода-вывода информации практически не отличается от мощности данного МПК, хотя непосредственно для МП существуют микросхемы с более низким энергопотреблением). Исходя из времени преобразования сигнала ЦАП, АЦП и тактовой частоты МП время обработки сигнала можно считать малым.
Достаточно высокий уровень выходных сигналов (1-2В, 0,4-2 мА) позволяет использовать данный сигнал в маломощных системах управления без предварительного дополнительного усиления.
Технические характеристики МП К1813ВЕ1:
-
25-ти разрядное ALU;
-
16-ти разрядные ОЗУ (192х24 бит) и ПЗУ (40х25 слов);
-
разрешение 0,5% (8 двоичных разрядов и знак);
-
нелинейность ЦАП и АЦП <0,1%;
-
время преобразования не более 50 мкс;
-
диапазон рабочих температур 0т –10 до 70 0С;
-
тактовая частота 5 МГц;
-
опорное напряжение 2 В;
-
потребляемая мощность (с учетом потребления ЦАП и АЦП) 1,75 В;
-
входное сопротивление (выборка) не менее 1,5 кОм;
-
входное аналоговое напряжение не более 2 В;
-
выходное сопротивление (хранение) не менее 100 кОм;
-
выходной ток 0,4 - 2 мА;
-
входной ток не более 2 мА;
-
ток потребления не более Icc - 50 мА;
IBB – 150 мА.
Передаточную функцию МП принимаем равной единице.
W(p)=1. (1)
2.2 Датчик уровня и делитель напряжения
Существует довольно большое количество датчиков уровня, разнообразной конструкции и видов. Выбор датчика обусловлен, прежде всего:
-
физической природой регулируемого параметра;
-
желаемой формой выходного сигнала (в данном случае желателен электрический выходной сигнал);
-
высокой чувствительностью и чувствительностью;
-
допустимой инерционностью;
-
малым или отсутствием влияния внешних условий;
-
возможностью настройки на различные значения регулируемого параметра;
-
малой энергоемкостью;
-
приемлемыми массогабаритные показателями;
-
сроком службы.
Был выбран поплавковый датчик РП 1065-1 (модификация со встроенным сельсином БД-404А) [2]. Он обладает малой погрешностью и высокой чувствительностью. Выходной электрический сигнал удобен для дальнейшей обработки тем, что не требует преобразования (как механический выходной сигнал - перемещение), а значит, не вносится дополнительная погрешность, сигнал имеет возможность для передачи на большое расстояние – к удаленному блоку управления (отпадает необходимость размещения схем управления в непосредственной близости от объекта управления).
Технические данные:
-
рабочий диапазон h не менее 6 метров;
-
температура окружающей среды от –10 до 50 0С;
-
напряжение питание сельсина 110 В;
-
частота сети 50 Гц;
-
мощность не более 12,5 Вт;
-
коэффициент чувствительности Kчув не хуже 30 В/м;
-
выходной ток сельсина Imax не более 0,5 А;
-
максимальное выходное напряжение сельсина Umax не более 100 В;
-
габариты 280х120х156 мм;
-
масса не более 0,6 кг.
Так как выходной ток и напряжение превышают допустимые входные ток и напряжение АЦП МП, ставим делитель напряжения, который также ограничивает максимальный ток и выпрямительный диодный мост КЦ-106.
Величина ограничивающего ток сопротивления вычисляется как
R=Umax/Imax=100/2.10-3=50 (кОм). (2)
Рассчитываем делитель при допустимом Кдат=0,6 В/м:
R1=Kдат R/ Kчув =1 (кОм). (3)
R2=R-R1=50-1=49 (кОм). (4)
Таким образом, расчет цепи обратной связи датчика уровня закончен и ее передаточная функция равна передаточному коэффициенту:
W(p)=0,6 (В/м). (5)
2.3 Рабочая емкость и заслонка
Исходя из технического задания в качестве рабочей емкости принимаем емкость, отвечающую ГОСТ 65751-86 типа БН-340-20, [7]:
-
высота емкости Н – 17 метров;
-
площадь емкости S – 5 м2;
-
допустимое давление P – до 2,5.105 Па.
В качестве заслонки выбираем одностороннюю параллельную заслонку типа РУЗ-76. При ее выборе руководствовались условиями технического задания и желательностью получения линейной характеристики (чего добиваются изготовлением заслонок сложной формы с линейным коэффициентом передачи за счет придания специального профиля проходному сечению (по параболическому или логарифмическому закону) – то есть линейной зависимостью пропускной площади от перемещения заслонки). Ее параметры, [11]:
-
Пропускная способность Q до 35 м3/с.
-
Допустимое давление до 2,7.105 Па.
-
Параметры управляющего органа (для воды под давлением 105 Па):
3.1 Момент нагрузки Mн 25 Н м;
3.2 Момент инерции Jн 50 кг м2;
3.3 Угловая скорость н 0,95 рад/с;
3.4 Угловое ускорение н 2,3 рад/с2 ;
-
Угловая погрешность при гармоническом сигнале для обеспечения 2% погрешности расхода жидкости через проходное сечение в установившемся режиме гарм = 18’.
Передаточная функция для заслонки и емкости имеет вид апериодического звена с параметрами [3]:
Т=![]() =0,7
(с),
(6)
=0,7
(с),
(6)
где:
=104 – удельный вес воды, Н/м3;
Р1=105 – давление на входе, Па;
Р2=2.105 – давление на выходе, Па;
h=13 – максимальная высота подъема жидкости (при рабочем уровне в 10 метров), м;
Q=30 – максимальный расход рабочей жидкости, м3/с;
S=5 – площадь рабочей емкости, м2.
К=![]() =4,2
(м/рад).
(7)
=4,2
(м/рад).
(7)
Таким образом, передаточная функция принимает вид:
W(p)=![]() =
=![]() .
(8)
.
(8)
2.4 Двигатель и редуктор
Двигатель выбираем исходя из необходимой для управления заслонкой мощностью, наличием реверсивности и экономичностью.
Ртреб=2 н (Мн + Jн н) = 0,276 (кВт). (9)
Выбираем двигатель серии МИ-22 с паспортными данными, [8]:
-
Мощность на валу двигателя Рном = 0,37 кВт;
-
Частота вращения nном = 3000 об/мин;
-
Напряжение питания Uном = 110 В;
-
Ток якоря Iа = 4,4 А;
-
Индуктивность якоря La=210 мГн;
-
Сопротивление обмотки якоря Rа =0,546 Ом;
-
Момент номинальный Мном =1,2 Н м;
-
Момент инерции двигателя Jд =40,8 кг м2.
Определяем оптимальное передаточное число редуктора:
io =
![]() =122,24.
(10)
=122,24.
(10)
Округляем его до ближайшего по ГОСТ стандартного значения для редукторов 125.
Редуктор предназначен для передачи механической энергии от электродвигателя к исполнительному органу системы и согласования скоростей вращения.
Так как передаточное число достаточно велико, то выбираем червячный редуктор РМЧ – 125 (как наиболее отвечающий массогабаритным требованиям к проектируемому регулятору при данном передаваемом моменте), [12].
Червячные редукторы этого типа предназначены для изменения крутящего момента от 125 до 3500 Н.м с передаточным числом от 75 до 135.
Технический данные редуктора:
-
Радиус шестерни 21,5 мм;
-
Длина червяка 46 мм;
-
Допускаемый крутящий момент на тихоходном валу - 125 Н м;
-
КПД - 0.8;
-
Частота вращения максимальная и минимальная 3000 и 125 об/мин.
Проверяем выбранный двигатель на соответствие по скорости:
ном = nном /30 =314,15 (рад/с). (11)
треб = io н = 112,75 (рад/с). (12)
Так как ном > треб то выбранный двигатель по скорости проходит.
Проверяем выбранный двигатель на соответствие по моменту:
Мтреб = Мн /( io) + (Jд +Jн /io2) н io=2,343 (Н м). (13)
Так как Мтреб< 2Мном , то выбранный двигатель по моменту проходит.
Определим передаточную функцию выбранного двигателя.
Рассмотрим динамические свойства электродвигателя постоянного тока. Поведение двигателя в переходных режимах, связанных с изменением угловой скорости, можно описать уравнениями:
Уравнение электрического равновесия:
U = Се + Iа (Ra + Lp), (14)
где:
Се - коэффициент противоЭДС, В.с/рад;
U - напряжение управления, В;
- угловая скорость якоря, рад/с;
Iа - ток, протекающий по цепи якоря, А;
Ra - активное сопротивление якоря, Ом;
L - индуктивность обмотки якоря, Гн.
Уравнение механического равновесия:
Jp=Cм Ia - Mн/i, (15)
где:
р – оператор Лапласа;
J - полный момент инерции на нагрузке, кг м2;
См - коэффициент момента, Н м/А;
Мн - момент нагрузки, Н м;
i - передаточное число редуктора.
Уравнение, связывающее угол поворота вала двигателя с угловой скоростью:
= /р. (16)
Решая совместно уравнения (14) – (16), получим:
kU=(ТэТмр2+Тмр+1)+RaMн(Тэр+1)/(СеСмi), (17)
где:
k - коэффициент передачи двигателя по скорости, 1/В с;
Тэ - электрическая постоянная времени, с;
Тм - механическая постоянная времени, с.
Коэффициент передачи двигателя по скорости определяется по следующей формуле:
k=1/Се; (18)
Электромагнитная постоянная времени равна:
Тэ = L/Ra; (19)
Механическая постоянная времени определяется через механические параметры двигателя:
Тм=J Ra/(СеСм). (20)
Из этого уравнения определяем передаточную функцию двигателя постоянного тока с независимым возбуждением, полагая, что момент нагрузки постоянный.
W(p)=/U=![]() .
(21)
.
(21)
Так как влияние электрической постоянной двигателя на его динамические свойства мало, ею можно пренебречь. В инженерной практике это правило используется, если Тм>4Tэ. Тогда:
W(p)=![]() .
(22)
.
(22)
где:
Кд=1/Се=![]() =0,306
(рад/В с). (23)
=0,306
(рад/В с). (23)
Т=J/F=![]() =0.0045
(c). (24)
=0.0045
(c). (24)
Таким образом:
W(p)=![]() =
=
![]() .
(25)
.
(25)
2.5 Усилитель мощности
При выборе усилителя мощности руководствуются следующим:
-
Вид входного и выходного сигнала, тип питания.
-
Требуемая мощность.
-
Надежность, независимость от внешних влияний (особенно коэффициента усиления), чувствительность, малые массогабариты.
Исходя из условия Русил>2Рном, выбираем в качестве усилителя тиристорный привод с системой импульсно-фазового управления со статическими преобразователями реверсивного типа БУ3609-21Г1У4 с управлением по якорной цепи. Его паспортные данные:
-
напряжение питания 110 В;
-
номинальный выпрямленный ток 10А;
-
максимально допустимый ток перегрузки 12 А;
-
суммарная погрешность частоты вращения к установленной не более 2%;
-
погрешность частоты вращения к установленной при изменении нагрузки не более 0,5%;
-
погрешность частоты вращения к установленной при изменении направления вращения не более 0,5%;
-
коэффициент неравномерности вращения не более 0,1;
-
постоянная времени тиристоров Т = 0,003 с.
Определим коэффициент усиления как:
К=Uтрог эд/Umin цап =
![]() =51,2.
(26)
=51,2.
(26)
Принимаем коэффициент усиления равным 55.
Передаточная функция усилителя запишется в виде:
W(p)=![]() =
=
![]() .
(27)
.
(27)
3. Деление ЛСУ на изменяемую и неизменяемую части. Определение устойчивости
К неизменяемой части относят все элементы регулятора с передаточной функцией отличной от единицы. Следовательно, к ним можно отнести все элементы кроме микропроцессорного блока.
Определяем характеристическое уравнение системы:
(0,003р+1)(0,0045р+1)(0,7р+1)=0,00000945р3+0,0052635р2+0,7075р+1=0. (28)
Для него выполняется необходимое и достаточные условия устойчивости по критерию Гурвица, [1]:
а0>0, a1>0, a2>0, =a1. a2 - а0. a3>0, .a3>0. (29)
следовательно, данная система устойчива.
4. Построение логарифмических характеристик и их анализ
4.1 Построение ЛАХ
Для дальнейшего исследования, полученную передаточную функцию разомкнутой системы подвергаем z – преобразованию.
W=![]() .
(30)
.
(30)
По таблицам преобразований имеем:
W(z)= .
(31)
.
(31)
Заменяя z на выражение от псевдочастоты :
z= ,
(32)
,
(32)
где:
То=0,003 – постоянная времени МП (время занятости), с.
И проводя все преобразования и сокращения, получаем:
W(j)=![]() .
(33)
.
(33)
По данной передаточной функции строим асимптотическую ЛАХ системы от псевдочастоты . Построение начинаем с проведения через точку на оси ординат с координатой 20lg580,25=55,27 дБ прямой с наклоном минус 20дБ/дек до пересечения с частотой 1=1/0,6977=1,433 рад (Рисунок 2), где наклон увеличивается на – 20 дБ/дек и становится – 40 дБ/дек. Эти участки обусловлены влиянием электродвигателя. Наклон – 40 дБ/дек сохраняется до частоты 2=1/0,0019=526,3158 рад, где он уменьшается на 20дБ/дек и становится –20 дБ/дек. Изменение обусловлено влиянием постоянной времени объекта регулирования. При достижении частоты 3=1/0,0015=666,(6) рад возрастает влияние датчика уровня, и наклон изменяется на + 20 дБ/дек и становится нулевым.
4.2 Построение ЖЛАХ
Построение ЖЛАХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки, [13]:
р=/=2,4211 (рад). (35)
20 log2/=37,45 (дБ). (36)
Через эту точку проводим низкочастотную асимптоту с наклоном
-
20Бд/дек и высокочастотную с наклоном – 40 дБ/дек.
ЛАХ не пересекает запретной зоны.
П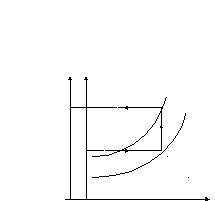 о
номограмме Солодовникова (Рисунок 3) и
заданным в первом этапе перерегулированию,
колебательности и времени перерегулированию
определяем частоту среза, [3]:
о
номограмме Солодовникова (Рисунок 3) и
заданным в первом этапе перерегулированию,
колебательности и времени перерегулированию
определяем частоту среза, [3]:
ср= 4/tp = 50,264 (рад). (37)
tp
4/c tp
30
1.3 M
Рисунок 3 - номограмма Солодовникова.
Для того чтобы система была устойчива и отвечала заданным критериям качества необходимо, чтобы через точку на оси абсцисс с координатой ср она проходила с наклоном – 20 дБ/дек до пересечения с асимптотами 20lgM/(M-1) и 20lgM/(M+1), [13]. Далее для построения ЖЛАХ поднимаем ЛАХ до пересечения с ЖЛАХ за пределами полосы ограниченной заданной колебательностью и соединяем низкочастотную часть с помощью прямой с наклоном – 40 дБ/дек. При этом мы получаем новый коэффициент усиления для усилителя к=310 при =3162,2777 (L=70 дБ).
4.3 Построение ФЧХ и определение запасов устойчивости
По полученной ЖЛАХ строим ФЧХ для определения запасов устойчивости по фазе и по амплитуде:
= -900 - arctg/k1+arctg/k3 - arctg/k4 –arctg/2+arctg/3. ( 38)
Таблица 1 - значения ФЧХ.
|
, рад |
0 |
5 |
10 |
20 |
40 |
50 |
80 |
100 |
200 |
300 |
|
, 0 |
-90 |
-103 |
-136 |
-126 |
-102 |
-128 |
-130 |
-132 |
-176 |
-184 |
Из построений находим, что запас по фазе составляет 520, а по амплитуде 18 дБ. Для заданной системы эти запасы достаточны, так как они при заданных показателях качества превышают минимально необходимые 400 и 12 дБ, следовательно, спроектированная система устойчива.
Определим ошибки по скорости, [14]:
ск=/tg(T0/2)=1’. (39)
по ускорению
ск=/tg(T0/2)=3’. (40)
и по моменту:
мом=M/(Fi2tg(T0/2))=13’. (41)
Поскольку данная система астатическая, то суммарная ошибка не превышает заданных 18’, следовательно, спроектированная скоррек-тированная система удовлетворяет требованиям ТЗ.
5. Синтез корректирующих звеньев
5.1 Синтез последовательного корректирующего звена
Коррекция динамических свойств САУ осуществляется для выполнения требований по точности, устойчивости и качеству переходных процессов.
С точки зрения требований к точности САУ коррекция может потребоваться для увеличения порядка астатизма или коэффициента передачи системы при сохранении устойчивости и определенного качества переходного процесса.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости, а также повышения качества переходного процесса.
Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им (также конечно существуют и комбинированные способы включения). Соответственно, по способу включения в систему корректирующие звенья делятся на последовательные и параллельные.
Рассмотрим обе возможности для нашей системы.
Построим ЛАХ последовательного корректирующего звена путем вычитания из ЛАХ ЖЛАХ. По виду полученной логарифмической амплитудно-частотной характеристики последовательного корректирующего устройства находим его передаточную функцию и конкретный вид:
Wк посл
(s) =
![]() .
(42)
.
(42)
R2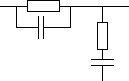
C2 R1
C1
Рисунок 4 - последовательное корректирующее устройство.
Рассчитаем параметры корректирующего устройства (Рисунок 4).
Так как все частоты корректирующего звена значительно меньше 1/То, где Т0 – период дискретности МП, то расчет можно вести по псевдочастоте, так как расхождение значений псевдочастоты и реальной частоты в этом интервале не превышает 2%, [3, 9].
Задаемся значением С1=10 мкФ. Тогда:
R1=T2/C1=0.7/10=70 (Ом). (43)
R2=((T1+T4) – (T2+T3))/C1=((5+0.0115) – (0.7+0.087))/10=422.45 (Ом)(44)
C2=T3/R2=0.087/422.45=0.21 (мкФ). (45)