

Описание работы модели
Модель, представленная на рис.2., состоит из следующих блоков:
-
Система автоматического управления;
-
Модель двигателя;
-
Модель вентиляторной нагрузки;
-
Модель охлаждения денормализата.
Система автоматического управления
Система автоматического регулирования представляет совокупность блоков управляющих двигателем и отрабатывающих возмущения. Она представлена на рис.11.
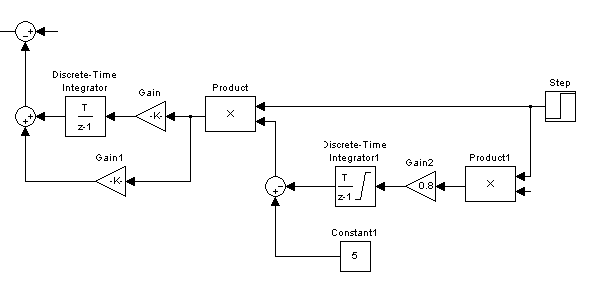
Рис. 11. Структурная схема системы автоматического регулирования
Сигнал от задатчика интенсивности поступает на апериодическое звено. Оно фильтрует сигнал с датчика и сглаживает сигнал задания по скорости. Затем сигнал поступает на блок ограничения, в котором он “ограничивается”. Выходом блока ограничения является сигнал задания по частоте. В цепь обратной связи включен блок Constant1, который задает постоянное значение напряжения, пропорциального температуре, поддерживаемой в системе. Это значение сравнивается с сигналом от датчика температуры (Constant) и формируется ошибка управления. Блок Step (ступень) предназначен для того, чтобы схема включалась после разгона двигателя, т.е. через 3,8 сек.
В
качестве регулятора скорости используем
ПИ – регулятор. Регулятор настраивается
на технический оптимум. Это значит, что
перерегулирование не должно превышать
5 %, этой настройке соответствует
соотношение:
![]() - равная наибольшей постоянной времени.
- равная наибольшей постоянной времени.
Электромеханическая постоянная времени находится при помощи моделирования в программе MatLab процесса прямого пуска асинхронного двигателя. График скорости апроксимируется переходным процессом, соответствующим апериодическому звену первого порядка. Общее время разгона во время наброса нагрузки составляет 3 с, следовательно, можно принять электромеханическую постоянную времени равной 0,2 с.
Для расчета параметров регулятора скорости, контур регулирования можно представить следующей передаточной функцией, рис.12.
При увеличении или уменьшении нагрузки на приводе вентилятора, с реле тока, снимается напряжение отрицательной обратной связи, которое после преобразования на блоке преобразования сигналов, в виде выпрямленного стабилизированного сигнала, поступает на преобразователь частоты и соответственно уменьшает или увеличивает частоту вращения двигателя.
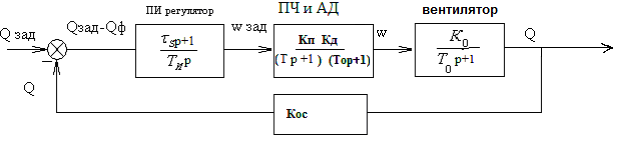
Рис. 12. Контур регулирования
В этом контуре коэффициент усиления рассчитывается по формуле:
![]() ,
,
где
![]() – сигнал на выходе,
– сигнал на выходе,
![]() – сигнал на входе.
– сигнал на входе.
В
силу малой постоянной времени
преобразователя частоты и единичным
коэффициентом усиления двигателя,
преобразователь частоты и двигатель
объединяем в один блок с передаточной
функцией
![]()
Постоянная времени для АВО:
![]()
![]() -
суммарный момент инерции АД и вентилятора,
кг·м2
-
суммарный момент инерции АД и вентилятора,
кг·м2
Передаточная функция вентилятора:
![]()
Коэффициенты усиления:
![]()
![]()
Передаточная функция разомкнутого контура:
![]()
В
целях компенсации наибольшей постоянной
времени постоянную времени регулятора
принимаем равной постоянной времени
вентилятора:
![]() c.
c.
Тогда:
![]()
Передаточная функция замкнутого контура:
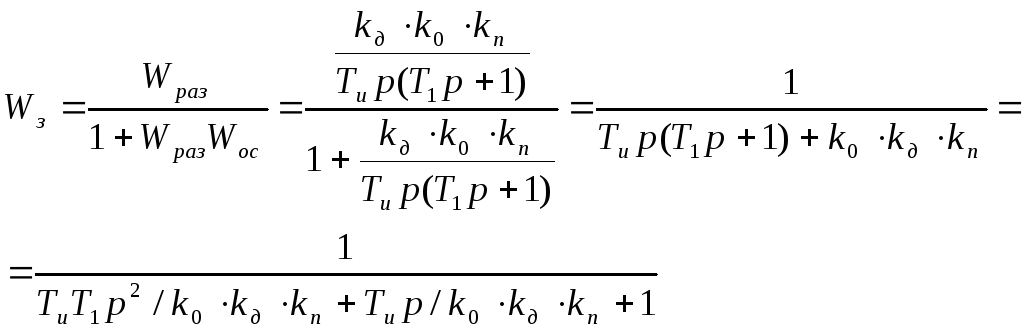
Характеристическое уравнение для критерия Т.О. имеет вид:
![]()
Т.о. в нашем случае замкнутый контур будет отвечать критерию технического оптимума, если
![]()
![]()
Коэффициент передачи регулятора:
![]()
Следовательно передаточная функция ПИ-регулятора имеет вид:
![]()