

3 Расчет датчика обратной связи
Принцип действия индукционных расходомеров основан на измерении пропорциональной расходу электродвижущей силы, индуктированной в потоке электропроводной жидкости под действием внешнего магнитного поля.
Величина этой э.д.с. для расходомеров, где магнитное поле изменяется во времени с частотой fопределяется по формуле:
![]() ,
(9)
,
(9)
где E– э.д.с.,
В – магнитная индукция в зазоре между полюсами магнита,
υ – скорость течения жидкости,
d– внутренний диаметр трубопровода,
f– частота промышленного тока.
Выражая скорость υ через объемный расход Q, получим:
![]() ,
(10)
,
(10)
где Q– объемный расход жидкости,
d– внутренний диаметр трубопровода,
f– частота промышленного тока.
Для данной системы приняты следующие характеристики:
B=300 мТл,
d=2.5∙10-2см,
f=50 Гц.
Таким образом, получаем уравнение для определения вида статической характеристики датчика:

По уравнению видно, что данная характеристика линейная и при максимальном расходе воды в рассматриваемой системе возникающая при этом э.д.с не будет превышать 10-5 В, что свидетельствует о том, что данное устройство не влияет на работу других электромагнитных устройств в разрабатываемой системе всилу малой э.д.с, наводимой в данном датчике расхода жидкости. поэтому следует сделать вывод, что данный датчик расхода жидкости подходит как по техническим параметрам разрабатываемой системы, так и по электрическим параметрам, создавая в ходе работы столь малые магнитные поля помех, что никак не отразится на устройствах, работающих также в разрабатываемой системе.
E,
10-6В
0.27
12
0
Q,
10-3м3/с


Рисунок 4 – Статическая характеристика датчика расхода жидкости
4 РАСЧЕТ ПЕРЕДАТОЧНОЙ ФУНКЦИИ СИСТЕМЫ, АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Расчет передаточной функции САУ процессом полива газона
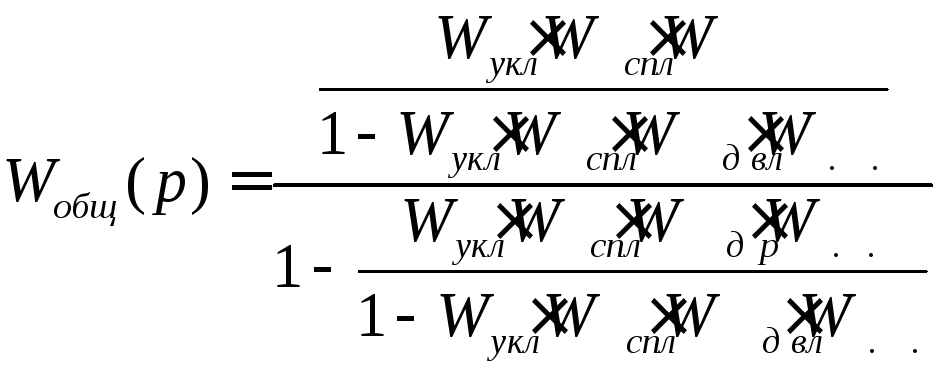
На рисунке 1 отображена структурная схема системы автоматического управления поливом газона. Найдем передаточную функция системы в общем виде путем преобразования структурной схемы:
 .
(11)
.
(11)
Подставив полученные ранее передаточные функции всех элементов системы и упростив выражение с помощью программы MathCadполучим передаточную функцию разомкнутой САУ процессом полива газона:
 .
(12)
.
(12)
Воспользовавшись программой MathCadнайдем функцию переходного процесса и построим его график:

По графику переходного процесса (рисунок 5) определим прямые оценки качества системы.
hуст=120 – установившееся состояние переходного процесса,
hmax=132,5 – максимальное значение переходного процесса,
tр=12,25с – время регулирования.
Перерегулирование
![]() ,
,
что вполне удовлетворяет техническому заданию, так как при разработке данной системы допускается 5% несовпадение заданного значения перерегулирования (10%) и полученного в ходе анализа графика переходного процесса.
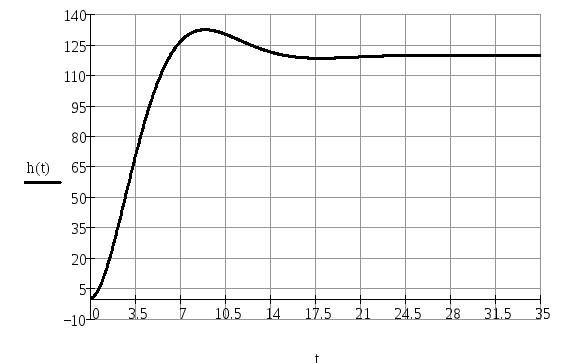
Рисунок 5 – Переходный процесс САУ процессом полива газона
Построим
амплитудно-частотную характеристику
для того, чтобы определить косвенные
оценки качества системы. Для того, чтобы
определить амплитудно-частотную
характеристику системы, необходимо в
передаточной функции
![]() рзаменить наjw.
Затем знаменатель уравнения помножить
на сопряженное выражение, а потом
выделить действительную и мнимую части
из полученного выражения по формулам
определить амплитудно-частотную
характеристику, то есть:
рзаменить наjw.
Затем знаменатель уравнения помножить
на сопряженное выражение, а потом
выделить действительную и мнимую части
из полученного выражения по формулам
определить амплитудно-частотную
характеристику, то есть:
![]() (13)
(13)
Построим амплитудно-частотную характеристику (рисунок 6), используя прикладную программу MathCad, и по графику амплитудно-частотной характеристики САУ процессом полива газона определим косвенные оценки качества САУ процессом полива газона.
Косвенные оценки качества САУ процессом полива газона.
Аmax=0,0053 – максимальная амплитуда сигнала.
w1=0 Гц,w2=0,12 Гц – полоса пропускания.
w,
Гц
A(w)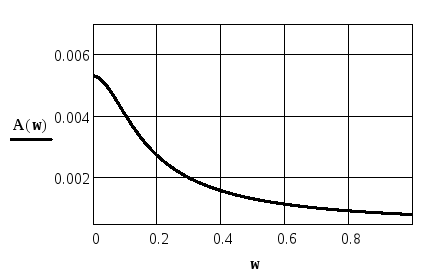


Рисунок 6 – Амплитудо-частотная характеристика САУ процессом полива газона
4.2 Определение устойчивости по критерию Гурвица
Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительными.
По коэффициентам характеристического уравнения:
![]() ,
(14)
,
(14)
составляется определитель Гурвица.
Для этого по главной диагонали определителя выписываются все коэффициенты характеристического уравнения, начиная со второго, затем вверх записываются коэффициенты с возрастающим индексом, а вниз с убывающим индексом.
Составленный определитель называется главным определителем Гурвица, он имеет порядок, совпадающий с порядком характеристического уравнения. Из главного определителя составляются частные определители первого, второго, третьего и так далее порядков их образования из главного определителя.
Вычисляя главный определитель и частные определители, Гурвиц установил, для того, чтобы система была устойчива необходимо и достаточно, чтобы все определители были положительны.
 (15)
(15)
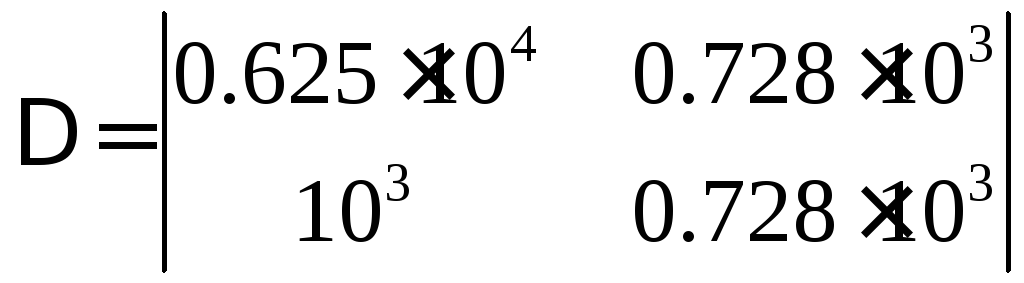
Вычислим миноры в определителе Гурвица:
![]()
![]()
Все миноры определителя Гурвица больше ноля, следовательно система устойчива.
4.3 Проведение z-преобразования передаточной функции САУ процессом полива газона с дискретным элементом
Z-преобразование проведем по формуле:
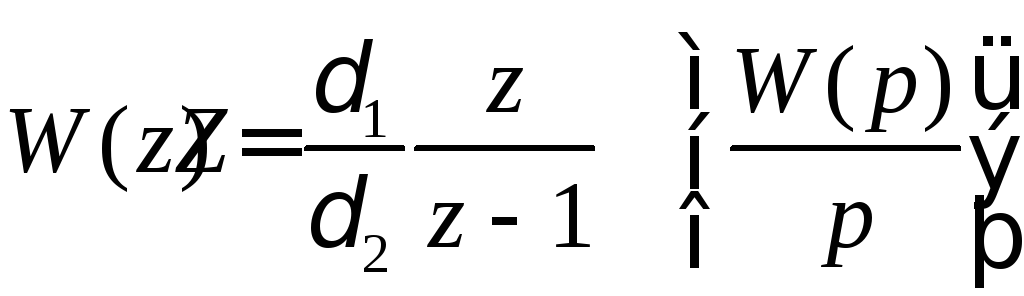 ,
(16)
,
(16)
где
![]() и
и![]() - показатели цифрового преобразования.
В рамках курсовой работы принимает их
равными 1;
- показатели цифрового преобразования.
В рамках курсовой работы принимает их
равными 1;
![]() -
передаточная функция импульсной системы.
-
передаточная функция импульсной системы.
 .
(17)
.
(17)
Воспользовавшись
программным продуктом MathLabможно получить передаточную функцию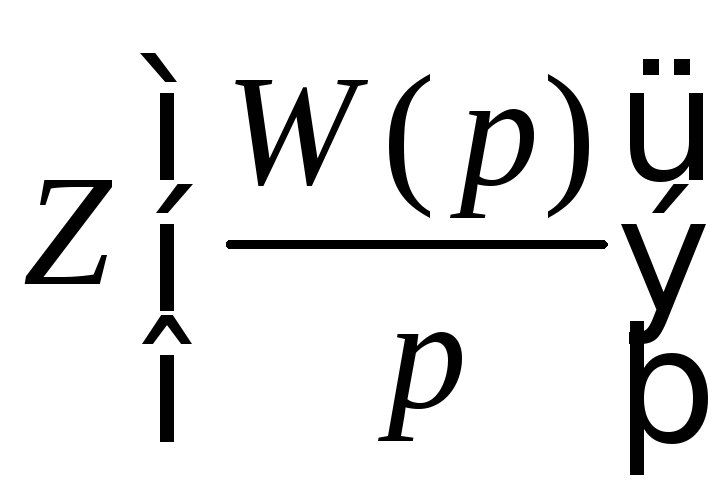 по приведенной ниже программе:
по приведенной ниже программе:
>> W=tf([0.62 3.875 3.875],[1000 6250 728 0])
Transfer function:
0.62 s^2 + 3.875s+ 3.875
---------------------------
1000 s^3 + 6250 s^2 + 728 s
>> W=c2d(W,1.5)
Transfer function:
0.00141 z^2 - 0.0001203 z + 1.268e-005
--------------------------------------
z^3 - 1.837 z^2 + 0.837 z - 8.482e-005
Sampling time: 1.5
Таким образом итоговое z-преобразование будет выглядеть следующим образом:
 .
.
Определим устойчивость полученной импульсной системы по критерию Шур-Кона. Для устойчивости импульсной системы необходимо, чтобы коэффициенты характеристического уравнения были положительны:
В нашем случае характеристическое уравнение:
![]() .
(18)
.
(18)
В характеристическом уравнении есть отрицательный коэффициент, следовательно, импульсная система не устойчива.
Проверим условия:
Составим определители Шур-Кона.

Посчитаем нечетные миноры матрицы. Для того, что бы система была устойчивой, чтобы нечетные миноры матрицы Шур Кона были меньше нуля, либо четные миноры матрицы были больше нуля.
Посчитав
миноры в MathCAD, получили:![]() ,
,![]() ,
,![]() ,
,![]() .
.
Таким образом, по критерию Шур-Кона получаем, что данная дискретная система устойчива.
Построим переходный процесс цифровой системы.
t,
c h(t)


Рисунок 7 – Переходный процесс дискретной САУ процессом полива газона
По данному рисунку видно, что переходный процесс сходящийся, что в некоторой степени свидетельствует о том, что дискретная система также является устойчивой, и нет необходимости в коррекции рассматриваемой дискретной CАУ процессом полива газона.