

2.5 Выбор датчика перемещений
В качестве датчиков перемещения могут быть использованы ёмкостные, индуктивные, трансформаторные, резисторные (реостатные, потенциометрические), струнные, фотоэлектрические, струйные, индукционные, оптические, ферродинамические датчики, кодирующие диски. Различают датчики перемещения малых перемещений — от нескольких мкм до нескольких см и больших перемещений — от десятков см до нескольких м; для измерения больших перемещений применяют датчики пути. Также для измерения относительно больших перемещений могут быть использованы реостатные датчики. Наиболее высокую чувствительность при измерении малых перемещений обеспечивают фотоэлектрические, ёмкостные и некоторые типы индуктивных датчиков. Для измерения перемещений, связанных с деформацией деталей, используют тензодатчики, обычно с усилителями.
Реостатный датчик - это реостат, движок которого перемещается под действием измеряемой величины. Работа реостатного датчика основана на зависимости электрического сопротивления проводника от его длины.
Наибольшее распространение получила потенциометрическая схема включения реостатного датчика, в которой реостат включают по схеме делителя напряжения [делителем напряжения называют электротехническое устройство для деления постоянного или переменного напряжения на части; делитель напряжения позволяет снимать (использовать) только часть имеющегося напряжения посредством элементов электрической цепи, состоящей из резисторов, конденсаторов или катушек индуктивности]. Переменный резистор, включаемый по схеме делителя напряжения, называют потенциометром, поэтому реостатный датчик иногда называют потенциометрическим.
Потенциометрические датчики пути работают по принципу линейно изменяющегося сопротивления (реостата), в котором ползунок перемещается по направляющей. Напряжение питания подается к датчику таким образом, что выходное напряжение на ползунке пропорционально его положению на направляющей. Направляющая датчика изготавливается из высококачественного пластика. Благодаря этому достигается высокая разрешающая способность прибора при значительной скорости перемещения (до 10 м/с). Потенциометрические датчики используются чаще всего благодаря своим преимуществам. Прежде всего, это абсолютный процесс, при котором измеряемые величины могут быть сразу измерены при включении напряжения питания. Также датчик прост в обращении и при относительно невысокой стоимости позволяет с высокой точностью измерять перемещения в диапазоне от 10 мм до 2000 мм.
Технические характеристики потенциометрического датчика пути MSL38:
- диапазон измерения, мм 103...2021;
- сопротивление, кОм 20;
- допуск на сопротивление, % ±20;
- разрешение, мм <0,01;
- максимальная рассеиваемая мощность, Вт 3,0;
- подшипник скольжения;
- максимальный ток в ползунке, мА 10;
- максимальная скорость измерения, м/с 10;
- рабочая температура, °С -40...+100;
- материала провода константан;
- коэффициент чувствительности Kчув не хуже 150 В/м;
- допустимая температура нагрева провода, °С 600.
Таким образом, датчик перемещения представляет собой пропорциональное звено с передаточной функцией
 .
(22)
.
(22)
Действительно, выходное напряжение датчика:
 ,
(23)
,
(23)
где R – сопротивление всей обмотки, Ом;
R1 – сопротивление обмотки на длине X, Ом;
Uп – напряжение питания, В.
Т.
к.
 ,
то
,
то
 и
и
 .
.
Таким образом, передаточная функция датчика:
 .
(24)
.
(24)
2.6 Выбор клапана
Исходя из условий работы, выберем электромагнитный клапан РП 5, соответствующий классу защиты 5.
Характеристика клапана:
- максимальное напряжение на обмотке Umax, В 11,5;
- нагрузка на обмотке Pн, Вт 1;
- максимальная частота работы , Гц 200;
- вес якоря, гр 4,7;
- вес реле, гр 140.
Передаточная функция такого реле имеет вид:
 (25) где c
= 1,2;
(25) где c
= 1,2;
x0 = 0,6;
k = 0,84;
A c+|x0|=5,8.
Тогда:

3 РАСЧЁТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
Потенциометрические датчики состоят из каркасов, на которые намотан провод, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка (контактной щетки), который касается провода. Для обеспечения электрического контакта обмотка в месте касания зачищается от изоляции. Движок прижимается к обмотке за счет силы упругости.
Потенциометрический датчик линейных перемещений условно изображается в виде переменного резистора, длина которого соответствует длине обмотки реостата.
Выполним расчёт используемого потенциометрического датчика перемещений, схематично изображенного на рисунке 2, на предмет устойчивости от внешних помех и расчёт основных элементов датчика, удовлетворяющих заданным условиям.
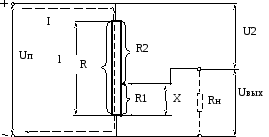
Рисунок 2 – Потенциометрический датчик перемещений
Анализ датчика на предмет устойчивости от внешних помех.
Найдём максимально допустимую температуру нагрева обмотки
 ,
(26)
,
(26)
где
 - предел прочности материала провода
(вольфрам),
- предел прочности материала провода
(вольфрам),
 ;
;
 - коэффициент линейного расширения
материала каркаса (оксидированный
алюминий),
- коэффициент линейного расширения
материала каркаса (оксидированный
алюминий),
 ;
;
 - коэффициент линейного расширения
материала провода (константан);
- коэффициент линейного расширения
материала провода (константан);
 ;
;
 - модуль упругости материала провода,
- модуль упругости материала провода,
 ;
;
 - минимальная температура нагрева
корпуса,
- минимальная температура нагрева
корпуса,
 .
.

 .
.
Допустимое значение перегрева обмотки:
 ,
(27)
,
(27)
где
 - максимальная температура окружающей
среды,
- максимальная температура окружающей
среды,
 .
.

 .
.
Рассчитаем основные параметры датчика по заданным условиям.
Диаметр провода (обмотки) :
 ,
(28)
,
(28)
где
 - коэффициент, зависящий от конструкции,
- коэффициент, зависящий от конструкции,
 ,
,
 ;
;
 - удельное сопротивление материала
провода (константан);
- удельное сопротивление материала
провода (константан);
 ;
;
 - максимальный ток,
- максимальный ток,
 ;
;
 - коэффициент теплоотдачи.
- коэффициент теплоотдачи.
 .
.
Средняя длина одного витка обмотки
 ,
(29)
,
(29)
где
 - сопротивление потенциометра,
- сопротивление потенциометра,
 ;
;
 - число витков обмотки; (30)
- число витков обмотки; (30)
 - максимальное перемещение ползунка,
- максимальное перемещение ползунка,

 ,
,
 -
диаметр провода с изоляцией,
-
диаметр провода с изоляцией,
 ;
;
 ;
;
 .
.
Диаметр каркаса:
 ,
(31)
,
(31)
где
 -
диаметр провода с изоляцией,
-
диаметр провода с изоляцией,

 .
.
Таким образом, в результате расчёта было показано, что выбранный датчик устойчив по отношению к внешним помехам, в частности, к воздействию температуры, так как вычисленная максимально допустимая температура нагрева обмотки меньше допустимой температуры нагрева провода. Кроме того, были рассчитаны геометрические параметры основных элементов датчика, удовлетворяющие заданным условиям.
4 РАСЧЁТ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Расчёт устойчивости непрерывной системы
К неизменяемой части системы относят все элементы с передаточной функцией, отличной от единицы.
Для определения устойчивости системы необходимо найти передаточную функцию разомкнутой системы управления, то есть системы без обратной связи.
 (32)
(32)
Для построения АЧХ и переходного процесса найдем передаточную функцию замкнутой системы:
 (33)
(33)
 (34)
(34)
Построим АФЧХ (рисунок 3):
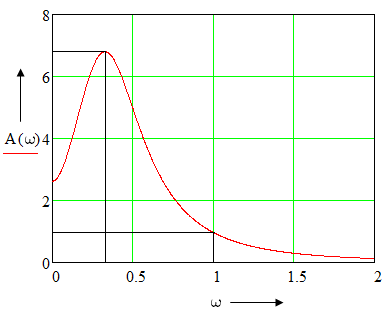
Рисунок 3 – АФЧХ разомкнутой системы
- резонансная частота (частота при которой АЧХ достигает своего максимального значения) ωР=0.33;
- показатель колебательности
 (35)
(35)
- частота среза wср=1.
Графическое представление переходного процесса представлено в соответствии с рисунком 4.
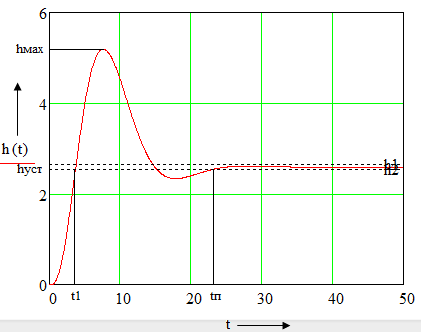
Рисунок 4 - График переходного процесса системы
По полученному переходному процессу определим показатели качества САР:
- установившееся значение hуст=2.6;
- 5% интервал отклонения от установившегося
значения будет соответствовать следующей
величине

- перерегулирование
- время переходного процесса tп=23,15 с;
- время первого согласования t1=3,65 c;
- период колебаний Т=19,8 с;
- частота колебаний
 с-1;
с-1;
- колебательность (число колебаний за время колебательного процесса) n=1.
Нули характеристического уравнения имеют вид: -33; -3229; -0,25+0,31j; -0,25-0,31j; -0,39+0,32j; -0,39-0,32j. Действительные части корней отрицательные, система устойчива.
Проверим систему критерием Найквиста. Годограф строится по разомкнутой системе. Выберем несколько значений частоты.
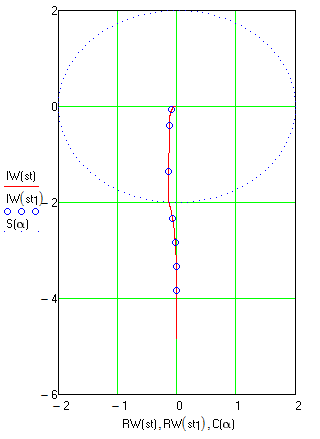
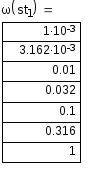
Рисунок 5 – Годограф Найквиста
Годограф не охватывает точку с координатами –j;0, отсюда делаем вывод, что система устойчива.
4.2 Расчёт устойчивости дискретной системы
Для перехода к дискретной системе необходимо выполнить z-преобразование.
Z-преобразование выполним с передаточной функцией замкнутой системы. Для этого воспользуемся встроенной функцией программной среды Matlab. Текст рабочей программы имеет вид:
>> Wz=tf([0.012],[6.3e-11 1.9e-7 7.5e-4 1 1])
Transfer function:
3.2e-030 s^4 + 7.2e-037 s^3 + 4.1e-025 s^2 + 1.9e-024 s - 120646
---------------------------------------------------------------------
s^6 + 3264 s^5 + 110800 s^4 + 140160 s^3 + 87707 s^2 + 27465 s + 4434
>> Wzed=c2d(Wz,1)
Transfer function:
-0.03244 z^5 - 0.2975 z^4 - 0.2456 z^3 - 0.01912 z^2 - 2.759e-007 z - 1.954e-023
--------------------------------------------------------------------------------
z^6 - 2.76 z^5 + 2.955 z^4 - 1.448 z^3 + 0.2753 z^2 - 1.3e-015 z - 3.571e-033
Sampling time: 1
>> step(Wz,Wzed)
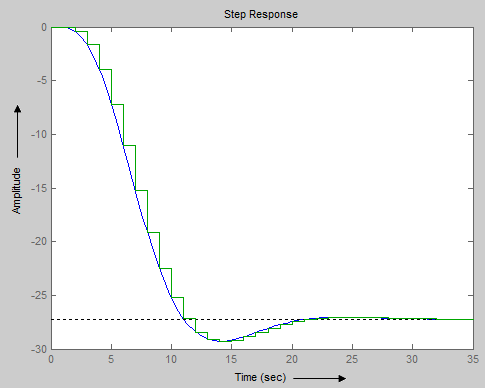
Рисунок 6 – График переходного процесса дискретной системы
Проверка устойчивости локальной системы автоматического регулирования выполняется на основании критерия устойчивости Шур-Кона, который позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в z-форме.
Характеристическое уравнение имеет вид:

 (36)
(36)
В характеристическом уравнении не все коэффициенты положительны, следовательно, импульсная система неустойчива.
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ И ИХ АНАЛИЗ
Для построения логарифмических характеристик, необходимо найти общую передаточную функцию разомкнутой системы.
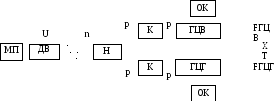
Рисунок 7 – Функциональная схема разомкнутой САУ перемещения
робота-манипулятора
Общая передаточная функция разомкнутой системы имеет вид:
 (48)
(48)
0.01171 z^3 + 9.692e-006 z^2 + 2.628e-023 z + 1.152e-044
--------------------------------------------------------
z^4 - 0.9311 z^3 + 5.764e-021 z^2 + 2.715e-036 z
Для построения ЛАЧХ и ЛФЧХ, и одновременного определения запасов устойчивости, воспользуемся функцией margin (Wz).
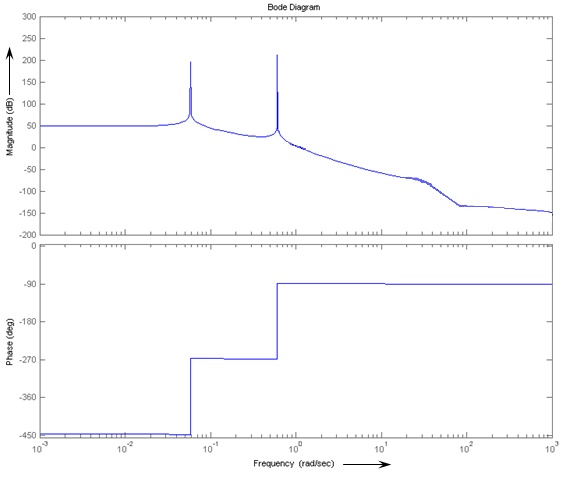
Рисунок 8 – ЛАЧХ и ЛФЧХ разомкнутой системы
Вывод: Запасы устойчивости по фазе и амплитуде равны нулю. Методом логарифмических частотных характеристик строится последовательное корректирующее устройство, обеспечивающее получение системы с требуемыми показателями точности.
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА
6.1 Исходные данные для разработки системы управления
Задаются максимальные значения скорости и ускорения задающего воздействия g(t):



Тогда получим координаты рабочей точки в логарифмическом масштабе:
 (57)
(57)
 (58)
(58)
Показатели качества системы:
 ;
;
tп=5 с;
 .
.
Далее определяем частоту среза:
 (49)
(49)
Для того чтобы система была устойчива
и отвечала заданным критериям качества,
необходимо, чтобы через точку на оси
абсцисс с координатой
 ЖЛАЧХ проходила с наклоном минус 20
дБ/дек до пересечения с асимптотами:
ЖЛАЧХ проходила с наклоном минус 20
дБ/дек до пересечения с асимптотами:
 (50)
(50)
 (51)
(51)
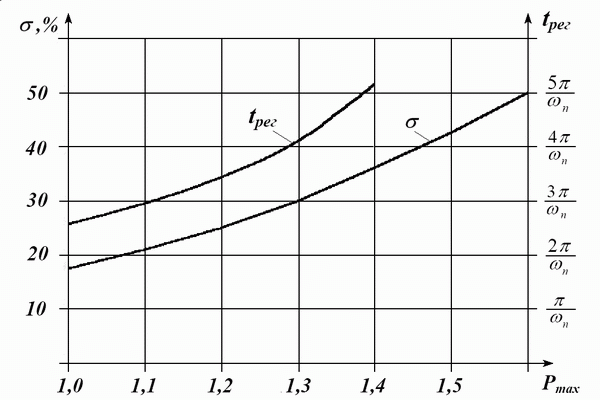
Рисунок 9 - Номограмма Солодовникова
Из построений можно определить передаточную функцию ЖЛАЧХ (рисунок 9):
 (52)
(52)
где
 – коэффициент усиления ЖЛАЧХ.
– коэффициент усиления ЖЛАЧХ.
Найдем
 :
:
20lg =90,
к=31622,8.
=90,
к=31622,8.
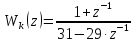
Перепишем выражение (51) с учетом найденного
значения
 :
:
 (53)
(53)
6.2 Построение ЛАЧХ корректирующего устройства
Применим последовательное корректирующее устройство (КУ). Подключение аналогового корректирующего устройства возможно последовательно с усилителем, также в данной работе рассматривается современная программная коррекция.
ЛАЧХ КУ строится зеркальным отображением относительно желаемой ЛАЧХ.
ЛАЧХ КУ изображена на рисунке 10.
Из построений можно определить передаточную функцию ЛАЧХ КУ:
 (54)
(54)
где
 – коэффициент усиления ЛАЧХ КУ.
– коэффициент усиления ЛАЧХ КУ.
Найдем
 :
:
20lg =
- 90,
=
- 90,
 =0,00003.
=0,00003.
Перепишем выражение (51) с учетом найденного
значения
 :
:
 (55)
(55)

Рисунок 10 – ЛАЧХ, ЖЛАЧХ системы, ЛАЧХ корректирующего
устройства
7 РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Коррекцию системы можно произвести при помощи программы для микропроцессора, которая будет реализовывать передаточную функцию корректирующего устройства. Чтобы составить программу необходимо найти разностное уравнение в реальном масштабе времени.
После замены
 ω,
ω⟶
ω,
ω⟶ ,
передаточная функция
,
передаточная функция
корректирующего устройства примет вид:
 (56)
(56)
Далее умножим числитель и знаменатель на z-1, получим:
 (57)
(57)
Запишем передаточную функцию в виде подаваемых величин входных и выходных сигналов.
 (58)
(58)
Записываем характеристическое уравнение:
 (59)
(59)
Процедура коррекции для микропроцессора, написанная на языке Assembler позволяет рассчитать полученное выражение:
х – входной сигнал;
у – выходной сигнал;
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи
А1 EQU -16667;
A2 EQU 16667;
B1 EQU 1;
B2 EQU 1;
x1, x2, DB 0; выделение памяти под переменные xk, xk+1;
у1, у2 DB 0; выделение памяти под переменные yk, yk+1;
вычисляем значение выражения (k)=A1*x1+A2*x2+B1*y1+B2*y2
start: ;метка начала цикла коррекции
in al,i_port ;чтение данных из порта
mov al,Al; вычисление слогаемого А1*х1
mov bl,al; сохранение результата в bl
в результате имеем А1*х1 в регистре bl
mov al,х2; вычисление
mul al,A2; слагаемое А2*х2
add bl,al; прибавление к предыдущему результату
в результате имеем А1*х1+А2*х2 в регистре bl
mov al,y1; вычисление
mul al,B1; слагаемое В1*у1
add b1,a1; прибавление к предыдущему результату
mov a1,y2; вычисление
mul al, B2; слагаемое В2*у2
add bl, a1; прибавление к предыдущему результату
в регистре b1 имеем результат вычисления всего выражения
mov y3,y2; для следующего такта
mov y2,y1;
mov y1,b1;
mov x2,x1;
mov x1,x;
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
Блок-схема возможной процедуры коррекции изображена на рисунке 11.
начало
Получение данных из основной программы
Разница между текущим и заданным значениями равна 0
нет да
Умножение текущего значения на коэффициент ошибки
конец
Рисунок 11 – Блок-схема корректирующего устройства
Вывод: Программное КУ является предпочтительным, т.к. обладает переносимостью с одной платформы на другую, легкостью эксплуатации и поддержания работоспособности. Возможно легко изменять параметры программы коррекции, что позволяет использовать одну программу для нескольких аналогичных систем.
ЗАКЛЮЧЕНИЕ
В процессе проектирования локальной системы перемещения робота-манипулятора была проведена следующая работа: подбор элементов, нахождение их передаточных функций и всей непрерывной системы в целом, расчет датчика обратной связи. Построение переходного процесса и АЧХ для определения прямых и косвенных характеристик САУ. Далее было произведено исследование САУ на устойчивость. При исследовании были построены ЛАЧХ и ЛФЧХ.
Так как дискретная система не удовлетворяла техническому заданию, была произведена ее корректировка. Поскольку в САУ имеется микропроцессор, то для наиболее полного использования его возможностей, предпочтительней корректирующее устройство реализовать в качестве рабочей программы. Поэтому была написана управляющая программа на языке ASSEMBLER.
Таким образом, в результате проектирования была получена дискретная система управления перемещением робота-манипулятора, удовлетворяющая требованиям, поставленным в техническом задании.