

3.1.1 Расчёт датчика температуры.
Чувствительным элементом устройства является биметаллическая пластина. Датчики с таким чувствительным элементом основаны на измерении разности линейных расширений двух металлов при их нагреве, закрепленных жестко между собой в точке измеряемой температуры.
![]() ,
(22)
,
(22)
где
![]() - разность удлинений металлов при
изменении температуры от градуи-
- разность удлинений металлов при
изменении температуры от градуи-
ровочной до t;
![]() -
удлинение первого металла;
-
удлинение первого металла;
![]() -
удлинение второго металла;
-
удлинение второго металла;
![]() -
коэффициент линейного теплового
расширения первого металла;
-
коэффициент линейного теплового
расширения первого металла;
![]() -
коэффициент
линейного теплового расширения второго
металла.
-
коэффициент
линейного теплового расширения второго
металла.
![]() .
.
Таблица 1 – Коэффициенты линейного расширения
|
Материал |
Коэффициент линейного расширения |
Материал
|
Коэффициент линейного расширения |
|
Латунь Никель |
|
Кварц Фарфор |
|
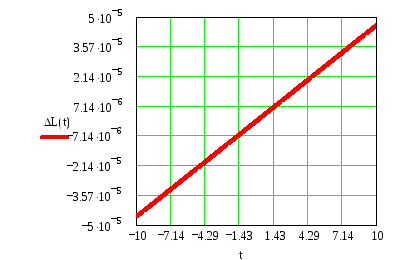
Рисунок 2 – Разность удлинений металла от температуры
3.2 Тахогенератор
Для регулирования частоты вращения вала ДПТ, передающий своё вращение вентилятору, был выбран тахогенератор типа ПТ-22/1.
Тахогенератор обладает следующими конструктивными особенностями:
- р=2 - число пар полюсов;
- W=600 - число активных проводников обмотки якоря;
- Ф=27·106 Вб - магнитный поток;
- z=2 - число параллельных цепей обмотки якоря.
С учётом приведённых параметров постоянная тахогенератора может быть вычислена:
![]() .
(23)
.
(23)
Тогда значения постоянной вычисляется:
![]() (В/с-1).
(В/с-1).
Следовательно, можно показать что при частоте вращения в нагрузке ΩH=22 с-1 на зажимах тахогенератора имеем E=6,3 B.
Тогда крутизна характеристики тахогенератора kтг:
![]() .
.
Статическая характеристика тахогенератора изображена на рисунке 4.
Ω
Е
В
с-1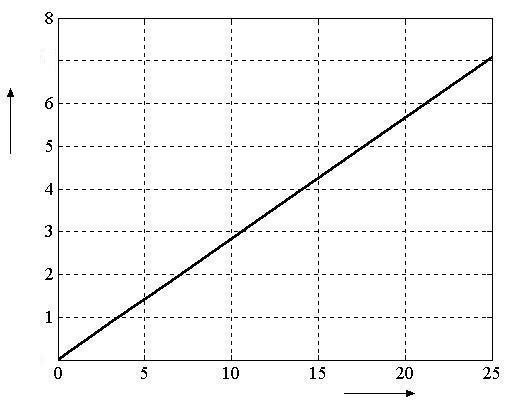
Рисунок 3 – Статическая характеристика тахогенератора ПТ-22/1
Передаточная функция тахогенератора:
![]() (23)
(23)
Электрические параметры тахогенератора:
- сопротивление якоря Rя, Ом 7,19;
- ток якоря Iя, А 0,4;
- сопротивление обмотки возбуждения RОВ, Ом 94;
- ток возбуждения IВ, А 0,12.
Массогабаритные параметры тахогенератора из справочника:
- диаметр вала dв, мм 10;
- длинна вала lв, мм 400;
- диаметр тахогенератора D,мм 150;
- длинна тахогенератора L, мм 300;
- масса тахогенератора m, кг 2.
В результате проведённых расчётов, можно сделать вывод, что выбранные датчики полностью удовлетворяют требованиям, установленными системой.
4 Анализ устойчивости системы
Преобразуем структурную схему рисунка 1 и найдём общую передаточную функцию системы.
Запишем передаточные функции элементов:
-
микропроцессор
![]() ;
;
-
усилитель мощности
![]() ;
;
-
двигатель
![]() ;
;
-
вентилятор
![]() ;
;
-
тахогенератор
![]() ;
;
-
нагревательный элемент
![]() ;
;
-
датчик температуры
![]() .
.
Структурная схема рисунка 1 примет вид:
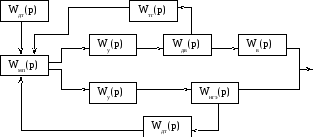
Рисунок 4 – Функциональная схема системы
Преобразуем схему:
![]() .
(24)
.
(24)
![]() .
(25)
.
(25)
![]() .
(26)
.
(26)
![]() .
(27)
.
(27)
Общая передаточная функция системы будет иметь вид:
![]() .
(28)
.
(28)
Проверим устойчивость системы по критерию устойчивости Ляпунова. Устойчивость по критерию Ляпунова означает, что все корни характеристического уравнения лежат в левой полуплоскости комплексной плоскости.
Найдём корни характеристического уравнения для замкнутой системы:
(29)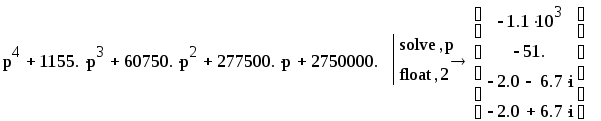
Так как все вещественные части корней отрицательны, то корни характеристического уравнения находятся в левой полуплоскости комплексной плоскости, а это означает устойчивость системы.
Проверим устойчивость системы по критерию Гурвица. Устойчивость по данному критерию означает, что все миноры определителя Гурвица были положительны.
Построим определитель по коэффициентам характеристического уравнения:
(30)
;
;
;
![]()
;
.
![]()
Условие выполняется - система является устойчивой.
Условие выполняется - система является устойчивой.
Так как в системе присутствует микропроцессор, который является дискретным элементом, необходимо выполнить Z-преобразование системы. Воспользуемся прикладной программой Matlab. Для построения переходного процесса воспользуемся функцией step(Wz):
(31)
.
Построим переходный процесс системы и определим прямые оценки качества.
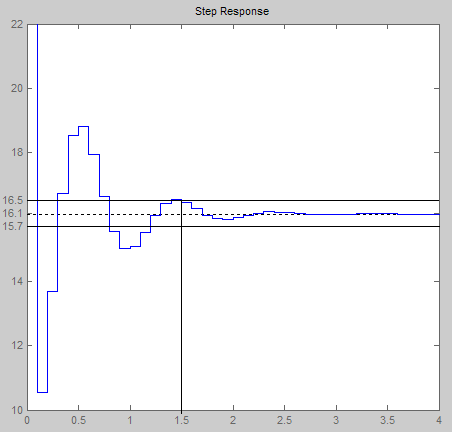
Рисунок 5 – График переходного процесса
Так как переходный процесс стремиться к устойчивому состоянию, можно сделать вывод, что данная система устойчива.
Прямые оценки качества системы:
- время переходного процесса системы – это время регулирования системы, определяется как интервал времени от момента приложения какого-либо воздействия на систему до времени вхождения системы в 5% трубку. tn = 1,5;
- перерегулирование (максимальная динамическая ошибка):
![]() ;
;
- колебательность – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние. N=3;
- время нарастания регулируемой величины – время, при котором выходная величина достигает своего максимального значения. tm=0,6;
- время первого согласования – время, за которое регулируемая величина первый раз достигнет своего установившегося значения. t1 = 3,6.
По полученным характеристикам можно судить об удовлетворительном качестве управления. Система, с присутствующим в ней дискретным элементом, не нуждается в коррекции.
П
(32)
.
![]()
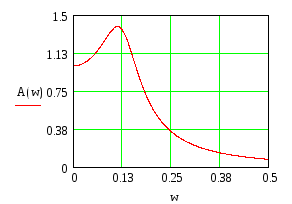
Рисунок 6 – График амплитудно-частотной характеристики
Косвенные оценки качества системы:
-
показатель колебательности:
![]() ;
;
- резонансная частота – частота, при которой амплитуда достигает значения максимума: р = 0,12;
- частота среза определяется как частота, при которой АЧХ принимает значение 1: ср =0.
-
полоса пропускания частот – интервал
частот, когда значения АЧХ больше, чем![]() (1,
2)
= (-
(1,
2)
= (-![]() ;0,18).
;0,18).
Проверим устойчивость системы по критерию Шур-Кона по которому для устойчивости системы необходимо и достаточно, чтобы диагональные миноры определителя Шур-Кона с нечетными индексами были меньше нуля, а с четными больше.
Х
(33)
![]() ;
;
Коэффициенты характеристического уравнения:
Составим определители Шур-Кона и произведём их расчёт:
;
;
![]()
;
;
![]()
;
;
![]()
;
.
![]()
Так как условие чередования знака выполняется, то данная система является устойчивой.
В результате проведённых анализов, выяснили что данная система является устойчивой.