6. Программа для микропроцессора
Блок-схема возможной процедуры коррекции изображена на рисунке 4.
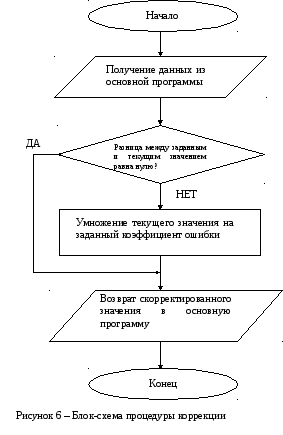
Ниже приведена процедура коррекции, написанная на языке ассемблера для микропроцессоров, совместимых с микропроцессорами фирмы Intel.
.CODE ;начало сегмента кода
CORR PROC FAR ;заголовок процедуры и тип вызова
POP AX ;получение из стека текущего значения
POP BX ;получение из стека заданного значения
MOV CX,1 ;количество бит для сдвига
CMP AX,BX ;сравнение зад. и текущ. значений
JZ FIN ;переход, если разница равна нулю
SHL AX,CL ;иначе коррекция путем умножения
FIN: PUSH AX ;возврат скорректированного значения
RET ;в основную программу
CORR ENDP ;конец процедуры
Для реализации приведенной программы на выбранном для системы управления автомобилем микропроцессоре необходимо использовать систему команд этого МП, учитывающую особенности его архитектуры и функционирования.
Заключение
В микропроцессорных системах, в отличие от непрерывных систем корректировку и расчет управляющего воздействия производят с учетом дискретности и длины слова. С увеличением периода дискретности качество управления снижается вследствие потери полезной информации в системе.
Применение более быстродействующих МП приводит к усложнению МП, его удорожанию и не всегда приводит к нужным результатам.
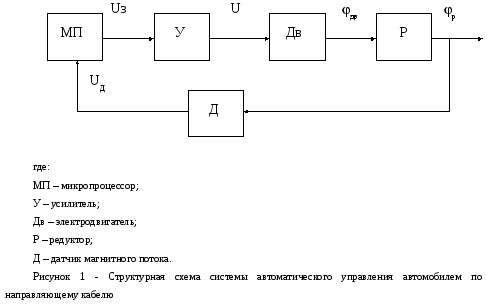
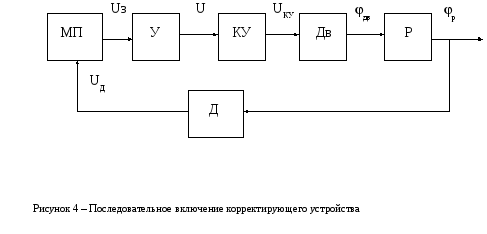
Первоначальная не скорректированная система не удовлетворяла требованиям к качеству управления. Включение корректирующего устройства улучшает качество переходного процесса и помогает достичь желаемых характеристик. Массогабаритные характеристики полученного регулятора также удовлетворяют требованиям ТЗ. Так как в системе нет статической ошибки, то она является астатической, а величина динамической ошибки удовлетворяет заданным требованиям ТЗ, следовательно, можно сделать вывод, что спроектированная система автоматического управления автомобилем по направляющему кабелю полностью отвечает требованиям ТЗ.
Список использованных источников
-
Хвощ С. Т. и др. Микропроцессоры и микроЭВМ в САУ.:справочник-Л.:Машиностроение. Ленигр.отд-ние, 1987.
-
Кузьмин К. В., Чернин И. М. Расчеты деталей машин. М.: Машиностроение, 1978.
-
Ежов В. Г.. Универсальные антенны. //Приборы и техника эксперимента, 1999, №6, с.138.
-
Чурзин Р. В. Основы создания автоматических регуляторов. М.: Высшая школа, 1974.
-
Топчеев Ю. М. Атлас для проектирования систем автоматического регулирования. М.: Машиностроение, 1989.
-
Юревич Е. И. Теория автоматического управления. М.: Энергия, 1969.
-
Егоров К. В. Основы теории автоматического регулирования. М.:Энергия, 1967.
-
Топчеев Ю. И. Нелинейные системы автоматического управления. Дискретные нелинейные системы. М.: Машиностроение, 1982.
-
Иващенко Н. Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1978.
-
Аш Ж. и соавторы. Датчики измерительных систем: В 2-х книгах. Пер. с франц. – М.: Мир, 1992.
-
Солодовников В. В., Плотников В. Н., Яковлев А. В. Основы теории и элементы систем автоматического регулирования. Учебное пособие для вузов. – М.: Машиностроение, 1985.
-
Юров В., Хорошенко С. Assembler: учебный курс – СПб: Питер Ком, 1999.