

2.2 Выбор микропроцессора пк
Выбран ПК на основе микропроцессорного комплекса (МПК), построенного на базе 16-ти разрядного микропроцессора КР1810БМ86. В состав комплекса входят ЦАП и АЦП.
Характеристики МПК:
- напряжение питания Uпит,В 5;
-быстродействие, млн. оп/с 2.5.
Таблица 1 - Характеристики ЦАП и АЦП
|
Элемент |
Тип микросхемы |
Разрядность |
tуст, мкс |
л % |
Uоп, В |
Uпит, В |
|
АЦП |
К572ПА2А |
12 |
15 |
0.1 |
±15 |
+5;+15 |
|
ЦАП |
К572ПВ1В |
12 |
170 |
0.2 |
±15 |
+5;+15 |
Такой комплекс обладает достаточным быстродействием для управления системой, малой стоимостью и малой потребляемой электроэнергией.
Передаточная функции микропроцессора:
(1)
![]()
2.3 Выбор транспортного механизма
Рассмотрим транспортный механизм; выбрана транспортерная конвейерная лента на ткани БКНЛ-65 со следующими характеристиками:
- фактический расход, м3/час 170;
- максимальная скорость барабана nтр, об/мин 54,2;
- требуемая мощность двигателя Ртр (кВт) при максимальной загрузке яиц и при оборотах двигателя n=1500 об/мин 11,8;
- приведенный к валу двигателя момент инерции Jнагпр, кгм2 1.25;
- момент статического сопротивления Мнагр, Нм 2429;
-транспортер снабжен редуктором с передаточным числом i 24.

Рисунок 2 – Внешний вид транспортёрной коверной ленты.
2.4 Определение передаточных функций элементов системы
2.4.1 Определение передаточной функции электродвигателя. Двигатель постоянного тока представляет собой колебательное звено, но в силу того, что электрическая постоянная времени оказывает малое влияние, ее можно не учитывать. Тогда передаточная функция представляет собой передаточную функцию апериодического звена:

 ,
,
(2)
где Тм - механическая постоянная времени, с;
kдв - коэффициент двигателя, рад/Вс.
Рассчитываем передаточную функцию двигателя:

 ,
,
(3)

 ,
,
(4)
где J - приведенный к валу двигателя момент инерции конвейера и якоря двигателя, кг/м2;
F - коэффициент демпфирования, Нмс/рад;
Се - электрическая постоянная двигателя, Вс/рад.

 1,38
(В·с/рад)
1,38
(В·с/рад)
(5)
где
 -
номинальные обороты электродвигателя,
рад/с
-
номинальные обороты электродвигателя,
рад/с

 (рад/с),
(рад/с),
(6)

 16,41
(Н·м·с/рад),
16,41
(Н·м·с/рад),
(7)
где
 – механическая постоянная двигателя,
Hм/А.
– механическая постоянная двигателя,
Hм/А.

 =
0,88 (Н·м/А)
=
0,88 (Н·м/А)
(8)
 (кг/м2);
(кг/м2);
(9)
где
 – момент инерции двигателя, кг/м2
;
– момент инерции двигателя, кг/м2
;
 -
приведённый к валу двигателя момент
инерции нагрузки, кг/м2.
-
приведённый к валу двигателя момент
инерции нагрузки, кг/м2.
Таким образом, получим передаточную функцию:
(10)

 0,198
,
0,198
,

 0,724,
0,724,
(11)

 .
.
(12)
2.4.2 Определение передаточной функции транспортного механизма. Определим передаточную функцию транспортного механизма как отношение выходной величины к входной. Выходной величиной можно считать объём яиц в секунду, а входной - угловую скорость вала двигателя.

 ,
,
(13)
где
 – объём яиц в секунду, м3/с;
– объём яиц в секунду, м3/с;
 – приведённая
к валу двигателя угловая скорость
барабана привода транспортной ленты,
рад/с.
– приведённая
к валу двигателя угловая скорость
барабана привода транспортной ленты,
рад/с.
 (м3/с),
пропускная способность конвейера 36
тыс.яиц/час.
(м3/с),
пропускная способность конвейера 36
тыс.яиц/час.


 136,6
(рад/с)
136,6
(рад/с)
(14)

 0,0003415.
0,0003415.
(15)
2.4.3 Определение передаточной функции маркировщика яиц.
Для данной системы был выбран маркировщик яиц ЭКСТ-ЧЕЛНОК 2М.
Обеспечивает маркировку яиц после сортировки. Печать осуществляется в челночном режиме при возвратно-поступательном движении печатающей головки с производительностью до 36 тыс. яиц в час.
Передаточная функция маркировщика определяется как отношение выходной величины к входной, т.е. отношение объёма яиц в секунду, к объёму промаркированных яиц.
Как
известно из расчёта передаточной функции
транспортного механизма,
 (м3/с)
– объём яиц в секунду.
(м3/с)
– объём яиц в секунду.
 (м3/с)
(м3/с)
(16)
Следовательно,

 =1
=1
(17)
2.4.4 Определение передаточной функции датчика скорости (тахогенератора).
Для регулирования частоты вращения вала ДПТ с наименьшей ошибкой по управлению, необходимо наличие обратной связи от выходного вала двигателя по частоте вращения.
На основании условий эксплуатации проектируемой системы был выбран тахогенератор типа ТП50-100-1
Технические характеристики прибора:
- максимальная частота вращения, об/мин 1500;
- ток якоря при номинальной частоте вращения n=500 об/мин, А 0,1;
- масса, кг 0,9;
- крутизна выходного напряжения, мВ/(об/мин) 100;
Якорь тахогенератора (коллекторного генератора постоянного тока с независимым возбуждением) приводится во вращение от вала, частота которого подлежит измерению. Э.Д.С., индуцируемая генератором, пропорциональна скорости вращения якоря:

(18)



 2,295,
(В/с-1),
2,295,
(В/с-1),
(19)
где
 -
число пар полюсов;
-
число пар полюсов;
 -
число активных
проводников обмотки якоря;
-
число активных
проводников обмотки якоря;
 -
магнитный поток в мкс;
-
магнитный поток в мкс;
 =2
-
число параллельных
цепей обмотки якоря;
=2
-
число параллельных
цепей обмотки якоря;
 -
постоянная
тахометра.
-
постоянная
тахометра.
Переходя к частоте вращения выраженной через с-1:


(20)
Переходя к изображению по Лапласу:

 32.81.
32.81.
(21)
Откуда передаточная функция электрического тахогенератора постоянного тока по частоте вращения имеет вид:


 .
.
(22)
 0.24
0.24
(23)
3 РАСЧЕТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ ЛСАУ
Датчик скорости, находится на одном из валов транспортёра, далее, сигнал с него поступает на микропроцессор, который, в свою очередь регулирует частоту вращения ДПТ, тем самым позволяя поддерживать постоянную скорость поступления яиц и печати маркеровщика.
Для регулирования частоты вращения вала ДПТ, передающий своё вращение вентилятору, был выбран тахогенератор типа ТП50-100-1.
Тахогенератор обладает следующими конструктивными особенностями:
-
 =2
-
число пар полюсов;
=2
-
число пар полюсов;
-
 =600
- число активных
проводников обмотки якоря;
=600
- число активных
проводников обмотки якоря;
-
 =27·106
Вб - магнитный поток;
=27·106
Вб - магнитный поток;
-
 =2
-
число параллельных
цепей обмотки якоря.
=2
-
число параллельных
цепей обмотки якоря.
С учётом приведённых параметров постоянная тахогенератора может быть вычислена:

 .
.
(24)
Тогда значения постоянной вычисляется:


 (В/с-1).
(В/с-1).
(25)
Тогда
крутизна характеристики тахогенератора
 :
:
(26)
 .
.
Статическая характеристика тахогенератора изображена на рисунке 3.
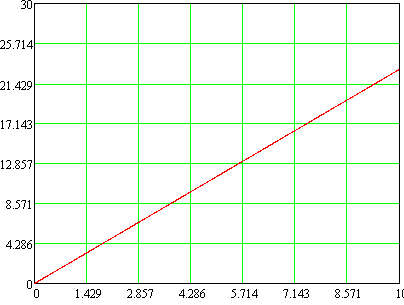
Е
В
с-1


Рисунок 3 – Статическая характеристика тахогенератора ТП50-100-1
4 РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Проверка устойчивости непрерывной части системы
4.1.1 Нахождение общих передаточных функций системы. Запи-
шем передаточные функции для всех элементов структурной схемы системы автоматического управления:
Микропроцессора:
(27)

Транспортная конвеерная лента:
(28)

Двигатель:

 ;
;
(29)
Маркеровщик:
(30)

Тахогенератор:
(31)

Структурная схема замкнутой системы автоматического управления поворотом головы терминатора представлена на рисунке 4:





 1
1










Рисунок 4 – Структурная схема замкнутой системы автоматического
управления
Применяя правила преобразования структурных схем, упростим нашу схему.
Выражение для общей передаточной функции замкнутой системы автоматического управления:


(32)
Используя программу Mathсad, подставив значения функций, получим
выражение общей передаточной функции замкнутой системы автоматического управления:
4.1.2 Критерий устойчивости Гурвица. Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были поло-жительными.
По коэффициентам характеристического уравнения составляется опреде-литель Гурвица. Для этого по главной диагонали определителя выписываются все коэффициенты характеристического уравнения, начиная со второго, затем вверх записываются коэффициенты с возрастающим индексом, а вниз с убывающим индексом.
Составленный определитель называется главным определителем Гурвица, он имеет порядок, совпадающий с порядком характеристического уравнения. Из главного определителя составляются частные определители первого, второго, третьего и т.д. порядков их образования из главного определителя.
Вычисляя главный определитель и частные определители, Гурвиц установил, для того, чтобы система была устойчива необходимо и достаточно, чтобы все определители были положительны. Если хотя бы один определитель отрицательный, то система неустойчива.
Характеристическое уравнение замкнутой системы автоматического управления имеет вид:
 (19)
(19)
1) Все коэффициенты характеристического уравнения положительны, поэтому необходимое условие устойчивости выполняется.
2) Составим определитель Гурвица (в программе MathCad ):
 Определим
значения миноров согласно равенствам:
Определим
значения миноров согласно равенствам:


Вывод: все миноры определителя Гурвица положительны, значит, вещественная часть корней характеристического уравнения отрицательна и, согласно теореме Ляпунова, рассматриваемая система автоматического управления устойчива.
4.1.3 Построение переходного процесса, нахождение его пока-зателей качества. По передаточной функции замкнутой системы определим временные характеристики и построим их графики.
Определим переходную функцию для системы, воспользовавшись прог-раммой Mathcad:



Рисунок 5 – Переходная функция замкнутой ЛСАУ в разных масштабах


Построим график переходной функции замкнутой системы (рисунок 6), используя программу Mathсad. Определим прямые оценки качества по полученным зависимостям.
По графику видно, что система является устойчивой.
Определим прямые оценки качества системы.
1) Максимальное значение переходного процесса:

(26)
2) Установившееся значение переходного процесса:

3) Время переходного процесса, ограниченное пятипроцентной трубкой, которая определяется интервалом регулируемой величины от

 c
c
4) Перерегулирование:

5) Колебательность: n=0.
6) Время нарастания регулируемой величины:
 c
c
7) Время первого согласования:

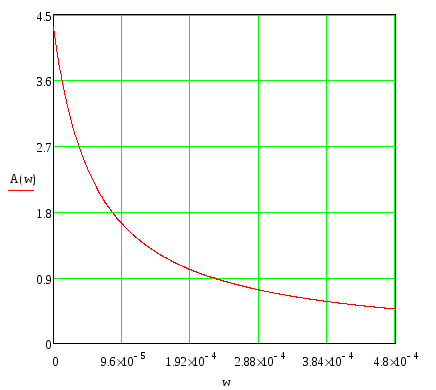
4.1.4 Построение АЧХ, нахождение её показателей качества. Определим амплитудно-частотную функцию замкнутой системы:
Передаточная функция для замкнутой системы:
Частотная
передаточная функция замкнутой системы
выразится следующим образом (заменяем
 ,
где i
– мнимая единица):
,
где i
– мнимая единица):



Построим график АЧХ замкнутой системы, используя программу Mathсad. Определим косвенные оценки качества по полученным зависимостям:




ɷ,1/с
ɷ1
Рисунок 7 - АЧХ замкнутой ЛСАУ
По графику видно, что система является устойчивой.
Определим косвенные оценки качества системы.
1) Максимальное значение АЧХ:

2) Показатель колебательности:
3) Резонансная частота:

4) Частота среза:
 нет,
значит, велико быстродействие системы,
то есть очень маленькое время регулирования
системы.
нет,
значит, велико быстродействие системы,
то есть очень маленькое время регулирования
системы.
5) Полоса пропускания:
Для
её определения вычислим сначала величину
 :
:

Далее проведём перпендикуляр на ось абсцисс и получим граничные частоты:

4.2 Проверка устойчивости системы с учетом дискретных элементов
4.2.1 Проведение z-преобразований передаточных функций замкнутой и разомкнутой ЛСАУ.


 ,
,
где
 и
и
 - показатели цифрового преобразования.
В рамках курсовой работы принимает их
равными 1;
- показатели цифрового преобразования.
В рамках курсовой работы принимает их
равными 1;
 -
передаточная функция импульсной системы.
-
передаточная функция импульсной системы.

 .
.
Воспользовавшись
программным продуктом MathLab
можно получить передаточную функцию
 :
:



Определим устойчивость полученной импульсной системы по критерию Шур-Кона. Для устойчивости импульсной системы необходимо, чтобы коэффициенты характеристического уравнения были положительны:
В нашем случае характеристическое уравнение:
 .
.
В характеристическом уравнении есть отрицательный коэффициент, следовательно, импульсная система не устойчива.
Проверим условия:
Составим определители Шур-Кона.
 ;
;
 ;
;
 ;
;

 =
2.012
=
2.012
Посчитаем нечетные миноры матрицы. Для того, что бы система была устойчивой, чтобы нечетные миноры матрицы Шур Кона были меньше нуля, либо четные миноры матрицы были больше нуля.
Посчитав
миноры в MathCAD,
получили: ,
,
Таким образом, по критерию Шур-Кона получаем, что данная дискретная система устойчива.
5 ПОСТРОЕНИЕ ЛАЧХ СИСТЕМЫ И ЕЕ АНАЛИЗ
5.1 Нахождение передаточной функции разомкнутой системы
U
U
n
n
n
МП

Дв
ТР
М
ДС









Рисунок 8 – Структурная схема разомкнутой системы
Разрывается обратная связь:


Используя программу Matlab и уравнение передаточной функции разомкнутой системы в z – преобразованиях (32), проведём 𝛌 – преобразование данной функции и далее по нему построим графики ЛАЧХ и ЛФЧХ:

Для проведения 𝛌 – преобразования введём следующую замену:


,
где Т=0.05 – период дискретизации.
где Т=0.07 – период дискретизации.
Рисунок 9 - Диаграмма Боде для импульсной системы
Получим 𝛌 – преобразованную передаточную функцию разомкнутой системы:


Построим ЛАЧХ, ЛФЧХ (диаграмму Боде), используя программу Matlab (рисунок 9).







-20 Дб/дек
+20 Дб/дек
0 Дб/дек
0 Дб/дек
Рисунок 9 - ЛАЧХ и ЛФЧХ дискретной системы
Вывод: методом логарифмических частотных характеристик строится последовательное корректирующее устройство, обеспечивающее получение системы с требуемыми показателями точности.
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
6.1 Построение ЖЛАЧХ
Построение ЖЛАЧХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки:
где
 – ускорение;
– ускорение;
 -
скорость перемещения нагрузки;
-
скорость перемещения нагрузки;

где
 – ошибка.
– ошибка.
Зададимся скоростью перемещения нагрузки, ускорением и ошибкой соответственно:



Тогда получим координаты рабочей точки в логарифмическом масштабе:


Через эту точку проводим низкочастотную асимптоту с наклоном минус 20Бд/дек (рисунок 11).
По номограмме Солодовникова (Рисунок 10) и заданным в первом этапе перерегулированию, колебательности и времени регулирования определяем частоту:
Далее определяем частоту среза:

Для
того чтобы система была устойчива и
отвечала заданным критериям качества,
необходимо, чтобы через точку на оси
абсцисс с координатой
 ЖЛАЧХ проходила с наклоном минус 20
дБ/дек до пересечения с асимптотами:
ЖЛАЧХ проходила с наклоном минус 20
дБ/дек до пересечения с асимптотами:


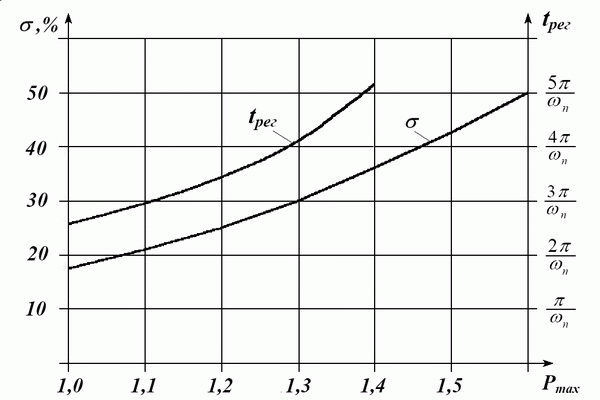
Рисунок 10 - Номограмма Солодовникова
За пределами полосы, ограниченной заданной колебательностью, ЖЛАЧХ совпадает по наклону с низкочастотной частью построенной ЛАЧХ.
Из построений можно определить передаточную функцию ЖЛАЧХ (рисунок 11):
ЛАЧХ КУ строится зеркальным отображением относительно желаемой ЛАЧХ.
где
 – коэффициент усиления ЖЛАЧХ.
– коэффициент усиления ЖЛАЧХ.
Найдем
 :
:
20lg =2.5,
к=1.3.
=2.5,
к=1.3.
Перепишем
выражение (41) с учетом найденного значения
 :
:

6.2 Построение ЛАЧХ корректирующего устройства




















+20 Дб/дек
-20 Дб/дек
ЖЛАЧХ
КУЛАЧХ
0 Дб/дек
Рисунок 11 – ЛАЧХ, ЖЛАЧХ системы, ЛАЧХ корректирующего
устройства

Из построений можно определить передаточную функцию ЛАЧХ КУ:

где
 – коэффициент усиления ЛАЧХ КУ.
– коэффициент усиления ЛАЧХ КУ.
Найдем
 :
:
20lg =60,
=60,
 =1000.
=1000.
Перепишем
выражение (41) с учетом найденного значения
 :
:

7 РАЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА. ИСПОЛЬЗОВАНИЕ ДИСКРЕТНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Одним из методов коррекции стало применение программных корректирующих устройств на микропроцессорах (в данном случае используется программируемый блок управления шаговыми двигателями), применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без внесения изменений в техническое исполнение системы.
Дискретная коррекция заключается в составлении программы коррекции на том языке, на котором работает микропроцессор («машинный» язык микропроцессора – Ассемблер, остальные языки программирования более понятны и удобны для человека, но не для процессора).
Для того чтобы составить программу коррекции необходимо получить характеристическое уравнение в реальном масштабе времени.
Произведем замены и выполним z – преобразование, согласно принятым допущениям:



Проведем z – преобразование, умножим и числитель, и знаменатель на z-1 и получим передаточную функцию корректирующего устройства, которая примет вид:

Характеристическое уравнение:

Для составления программы, выражение представим в виде:

Микропроцессор выявляет отклонение полученного сигнала от желаемого, то есть необходимого в данный момент, и выдает команду на устранение этого отклонения.
Значения желаемого сигнала задаются в микропроцессоре в цифровом виде. Вычисления производятся в машинном коде.
;X – входной сигнал
;Y – выходной сигнал
i_port EQU 11h; номер порта для чтения
o_ port EQU 12h; номер порта для записи
A1 EQU -33333; постоянные
A2 EQU 33333; коэффициенты
B1 EQU 1; разностного
B2 EQU 1; уравнения
X0, X1 DB 0; выделение памяти под
;переменные X(k), X(k-1)
Y0, Y1 DB 0; выделение памяти под
;переменные Y(k), Y(k-1)
;т. о. вычисляем значение
;выражения
Y(K) = A1*X1+ A2*X2 +B1*Y1+ B2*Y2
start: ;метка начала цикла коррекции
in al, i_port; читаем из порта данные
mov X1, a1;
mul a1, A1; вычисление слагаемого A1*X1
mov b1, a1; сохранение результата в b1
; в результате имеем A1*X1 в регистре b1
mov a1, X2; вычисление
mul a1, A2; слагаемого A2*X2
add b1, al; и вычитание из предыдущего результата
; в результате имеем A1*X1+A2*X2 в регистре b1
mov a1, Y1; вычисление
mul a1, B1; слагаемого B1*Y1
add b1,a1; и вычитание из предыдущего результата
mov a1, Y2; вычисление
mul a1, B2; слагаемого B2*Y2
add b1, a1; и вычитание из предыдущего результата
; в регистре b1 имеем результат вычисления всего выражения
mov Y2,Y1; сохранение значений для
mov Y1, b1; следующего такта
mov X2,X1; сохранение значений для
mov X1, a1; следующего такта
out o_port, b1; вывод управляющего сигнала из b1
jmp start; зацикливание на начало программы
Блок схема алгоритма коррекции приведена на рисунке 12:
НАЧАЛО




Чтение
входного сигнала и помещение его в






Вывод
управляющего сигнала


КОНЕЦ
Рисунок 12 – Блок-схема алгоритма коррекции
ЗАКЛЮЧЕНИЕ
В
данной курсовой работе была спроектирована
и разработана система автоматического
регулирования поворотом головы
терминатора. Система является перспективной
и
может работы при неблагоприятных
факторах окружающей среды – запыленности,
задымленности, тумане.
В ходе предметного поиска были выбраны необходимые элементы системы (программируемый блок управления шаговыми двигателями, шаговый двигатель, ультразвуковой датчик измерения расстояния), рассчитаны их математические модели.
Производилась
проверка системы на устойчивость, причем
как ее непрерывной части, так и всей
ЛСАУ в целом. Проверка непрерывной части
проводилась по критерию устойчивости
Гурвица, причем были определены прямые
и косвенные показатели качества по
переходному процессу и АЧХ соответственно,
при этом была доказана ее работоспособность.
Для оценки импульсной системы проводились
z
– преобразования и
 – преобразования, после чего была
посчитана устойчивость ЛСАУ по критерию
Шур – Кона, а характеристики качества
были проверены по импульсной переходной
функции и ЛАЧХ. В процессе чего было
установлено, что система находится на
колебательной границе устойчивости и
имеет невысокие запасы устойчивости
по амплитуде и нуждается в целенаправленной
коррекции.
В качестве последней была выбрана
современная и недорогая в реализации
программная коррекция, которая
представляет собой загрузку в
программируемый блок управления шаговыми
двигателями специально для этого
написанной программы на языке «машинных
кодов» Ассемблере.
– преобразования, после чего была
посчитана устойчивость ЛСАУ по критерию
Шур – Кона, а характеристики качества
были проверены по импульсной переходной
функции и ЛАЧХ. В процессе чего было
установлено, что система находится на
колебательной границе устойчивости и
имеет невысокие запасы устойчивости
по амплитуде и нуждается в целенаправленной
коррекции.
В качестве последней была выбрана
современная и недорогая в реализации
программная коррекция, которая
представляет собой загрузку в
программируемый блок управления шаговыми
двигателями специально для этого
написанной программы на языке «машинных
кодов» Ассемблере.
Таким образом, разработанная ЛСАУ маркирования куриных яиц является работоспособной, при этом рассчитанные показатели удовлетворяют техническому заданию на разработку.