

2Выбор элементов системы
2.1 Микропроцессор
Микропроцессор – программно-управляемое устройство обработки информации, выполненное на одном или нескольких кристаллах, способное выполнять большое количество функциональных операций. Выпускается типовой ряд микропроцессоров с различным быстродействием, числом разрядов, входов, выходов и т. п. Выбираем микропроцессор 8051АН/72710 [6, 204].
Микропроцессор 8051АН/72710:
- разрядность слова данных …………………….. …………….8;
- технология……………………………………………………...n-МОП;
- емкость встроенного ОЗУ ……………………………….……1К8 битразряд;
- число основных команд ……………………………………….62;
- максимальная тактовая частота……………………………….10000 к Гц;
- наибольшее время выполнения команды …...………………..6,8 мк с;
- число уровней прерывания……………………… ……………4;
- напряжение питания …………………………………………...5В.
В выбранном микропроцессоре (микропроцессорном комплекте) присутствуют АЦП, ЦАП и алгоритм преобразования.
Примем передаточную функцию микропроцессора равной единице.
![]() .
(1)
.
(1)
2.2 Операционный усилитель
Операционный усилитель – усилитель постоянного тока, предназначенный для работы с глубокой отрицательной связью и выполнения ряда математических операций над входным сигналом (умножение на постоянный коэффициент, суммирование, вычитание, интегрирование, дифференцирование, нелинейное преобразование и т. д.).
 Выбираем
прецизионный операционный усилитель
К551УД1А [5, 90], предназначенный для
использования в контрольно–измерительных
системах.
Выбираем
прецизионный операционный усилитель
К551УД1А [5, 90], предназначенный для
использования в контрольно–измерительных
системах.
Операционный усилитель К551УД1А:
-
минимальное напряжение питания , U
п min
…………………...……….![]() 5
B;
5
B;
-
максимальное напряжение питания , U
п
max………..………………….![]() 17
В;
17
В;
- мощность потребления в режиме покоя , P п …………….…………….160 мВт;
- типовое напряжение смещения нуля , U смещ ………………………….. 1,5 мВ ;
- типовой входной ток смещения , Iсмещ………………………………...…100 нА;
- коэффициент усиления , k u………………………………………...…….110;
- типовое входное сопротивление , R вх……………………..……………1М Ом.
Передаточную функцию операционного усилителя принимаем равной коэффициенту усиления:
![]() (2)
(2)
2.3 Тиристорный преобразователь
Широкое применение получили устройства с использованием тиристоров в качестве регуляторов. Если использовать для управления тиристором магнитный усилитель, то изменяя ток управления усилителя, можно изменять угол насыщения магнитопровода и момент появления напряжения на нагрузке, которое открывает тиристор. Таким образом, можно получать широтно-импульсное регулирование тока в нагрузке. Тиристор в схеме (рисунок 2) является управляемым выпрямителем. Управление тиристором производится напряжением, создаваемым на резисторе Rн током нагрузки магнитного усилителя (МУС). Магнитодвижущая сила обмотки смещения см выбирается такой, чтобы при токе управления МУС, равным нулю, ток нагрузки через резистор Rн был минимальным. Диод Д2 служит для того, чтобы тиристор Т не открывался током холостого хода МУС (напряжение холостого хода на резисторе Rн меньше порогового напряжения диода Д2). При подаче тока управления в МУС напряжение, создаваемого на резисторе Rн, открывает тиристор, через двигатель протекает ток ia . Из-за наличия индуктивности цепи якоря тиристор закрывается не в нуле напряжения, а в момент t2, когда ток становится равным нулю. Регулируя ток управления МУС, можно менять угол открытия тиристора и средний ток, протекающий через якорь.
Рисунок 2 - Тиристорная схема управления ДПТ
Выбираем усилитель с широкоимпульсным управлением, с предварительным коэффициентом усиления kу=1. Определим постоянную времени тиристорного преобразователя Тф :
![]() (3)
(3)
где f=50 Гц – промышленная частота.
Мощность двигателя велика, поэтому выбираем тиристорный усилитель со следующей передаточной функцией:
![]() (4)
(4)
2 .4
Двигатель
.4
Двигатель
Выбирая двигатель постоянного тока, будем исходить из следующих соображений. В техническом задании указана частота вращения. Поскольку она невелика, мы можем выбрать микродвигатель, предназначенный для преобразования электрического сигнала в угол поворота или частоту вращения вала. В настоящее время наибольшее распространение получили асинхронные двухфазные двигатели, двигатели постоянного тока с независимым возбуждением или с возбуждением от постоянных магнитов, шаговые двигатели.
Выбираем двигатель постоянного тока 2ПО132LУХЛ4 [3, 358:
- полезная мощность, Pp ном……………...……………………………0,37 кВт;
- частота вращения вала………………………………………………100 об/мин;
- напряжение питания, Uном……..…………...………………………..110 B;
- ток питания, I ном………………………..……………………………4,2 A;
- сопротивление обмотки якоря R a………….....…………………….1,46 Ом;
- отношение массы двигателя к его полезной мощности, g*.……..34 г/Вт;
- КПД, ……..……………………………………………………..…..71 ;
- номинальный момент Мном…………………...………………….….3,6 Нм;
- динамический момент нагрузки Jн………..………………………...22 кгм2;
- момент инерции вращающихся масс двигателя, Jд………..………13510-4кгм;
Допустим, что:
- частота вращения нагрузки н………………………………………..2,1 рад/с;
- ускорение нагрузки Eн…………………………………………………2,8 рад/с2;
- номинальный момент нагрузки Мн………………………………..…….17 Нм.
Требования, предъявляемые к двигателям, вытекают из специфических условий работы двигателей в устройствах автоматики. Основные из них: высокое быстродействие (малая инерционность); возможность регулирования частоты вращения двигателя в широком диапазоне, отсутствие самопроизвольного вращения (самохода) при отсутствии управляющего сигнала; высокая линейность регулировочных и механических характеристик; малый момент трения (малое напряжение трогания). Немаловажными для двигателей являются и такие параметры, как пусковой момент, габариты, масса, мощность управления; КПД и cos имеют второстепенное значение. Когда требуется строго постоянная частота вращения, используют синхронные двигатели.
Р ассчитаем
передаточную функцию:
ассчитаем
передаточную функцию:
Определим необходимую мощность двигателя:
![]() ; (5)
; (5)
Проверим подбор двигателя:
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
Поскольку
![]() ,
то двигатель проходит по скорости.
,
то двигатель проходит по скорости.

![]() (10)
(10)
Поскольку
![]() ,
то двигатель проходит по моменту.
,
то двигатель проходит по моменту.
Проведем расчет статических характеристик. Находим коэффициент противо-ЭДС Сеи коэффициент моментаСм:
![]() (11)
(11)
![]()
 (12)
(12)
Определяем коэффициент демфирования F:
![]() (13)
(13)
Определяем момент инерции:
 (14)
(14)
Определяем механическую постоянную времени двигателя:
![]() (15)
(15)
Определяем коэффициент усиления двигателя kд:
![]() (16)
(16)
Таким образом, передаточная функция двигателя постоянного тока будет иметь следующий вид:
![]() (17)
(17)
2.5 Тахогенератор
Тахогенераторами называют электрические микромашины, предназначенные для преобразования угловой скорости контролируемого вала в электрический сигнал.
Тахогенераторы постоянного тока имеют ряд преимуществ: выходной сигнал на постоянном токе позволяет создавать простую схему управления; при изменении направления вращения меняет полярность сигнала, что является дополнительной информацией для схемы управления; небольшие габариты и масса, проще схема компенсации температурной погрешности.
В ыбираем
тахогенератор постоянного тока ПТ –
31/1 [4, 434].
ыбираем
тахогенератор постоянного тока ПТ –
31/1 [4, 434].
Технические данные:
- частота вращения, n………………..………………………………..200 об/мин; -- напряжение, U……………………………………………………………..230 В;
- ток якоря, Iя…………………………………………………………………0,1 А;
- ток возбуждения, Iв……………..………………………………………….1,1 А;
- сопротивление якорной цепи, Ra…………………………………………380 Ом;
- сопротивление обмотки возбуждения, Rя………………………………..41,6 Ом.
Передаточная функция тахогенератора имеет следующий вид:
![]() (18)
(18)
где kтг – крутизна характеристики тахогенератора.
![]() (19)
(19)
С
 ТРУКТУРНАЯ
СХЕМА ЛОКАЛЬНОЙ СИСТЕМЫ И ИССЛЕДОВАНИЕ
ЕЕ НА УСТОЙЧИВОСТЬ
ТРУКТУРНАЯ
СХЕМА ЛОКАЛЬНОЙ СИСТЕМЫ И ИССЛЕДОВАНИЕ
ЕЕ НА УСТОЙЧИВОСТЬ
3.1 Структурная схема неизменяемой части системы
К неизменяемой части принято относить исполнительные органы, усилители мощности и измерительные средства. К неизменяемой части системы относят электронные усилители, преобразователи, микропроцессоры, различные дополнительные средства компенсации сигналов и устройства коррекции динамических характеристик.
Определив передаточные функции всех элементов системы, строим структурную схему (рисунок 3).
![]()
![]()
1 110






1,15
р


Рисунок 3 – Структурная схема системы
Передаточная функция замкнутой системы имеет вид:
![]() (20)
(20)
В настоящей системе изменяемой частью является микропроцессор, так как его замена не вызовет изменения в передаточной функции системы.
3.2. Исследование системы на устойчивость
В исследуемой системе разомкнем обратную связь и определим устойчивость системы.
Передаточная функция разомкнутой системы имеет вид:
![]() (21)
(21)
О пределим
устойчивость системы. Для этого
воспользуемся алгебраическим критерием
Гурвица.
пределим
устойчивость системы. Для этого
воспользуемся алгебраическим критерием
Гурвица.
Критерий
Гурвица формирует условие устойчивости
в виде определителя.![]()
![]() (22)
(22)
где а0, а1, а2, а3 – коэффициенты характеристического уравнения.
Условие устойчивости по Гурвицу сводится к тому, чтобы при
![]() все
диагональные миноры главного
определителя были больше нуля.
все
диагональные миноры главного
определителя были больше нуля.
За характеристическое уравнение примем выражение, стоящее в знаменателе передаточной функции разомкнутой системы:
![]() ;
(23)
;
(23)
![]() (24)
(24)
В этом уравнении а0=0,01328; а1=0,447; а2=1; а3= 0. Получаем:
![]()
![]() (25)
(25)
![]() (26)
(26)
Так как коэффициенты и определители уравнения больше нуля, то система в разомкнутом состоянии устойчива.
3.3 Построение переходного процесса и оценка качества системы
Для оценки качества системы построим переходный процесс для разомкнутой части с передаточной функцией (21).
Если на вход подается единичная ступенчатая функция 1(t), тогда выходной сигнал равен:
![]()
 ;(27)
;(27)
![]() ; (28)
; (28)
Теперь перейдем к h(t) с помощью обратного преобразования Лапласа:
 ;
(29)
;
(29)
И получим уравнение переходного процесса:
![]() ; (30)
; (30)
По данному уравнению (30) на рисунке 4 построим график.
![]()

Рисунок 4 - График переходного процесса системы.
Исходя из полученной переходной функции h(t) проведем оценку качества системы:
- Установившееся значение переходного процесса hуст = 310;
- Максимальное значение переходного процесса hуст = 310 ;
- Время переходного процесса tn= 3с;
Время перерегулирования переходного процесса =0.
С
 ИНТЕЗ
СИСТЕМЫ МЕТОДОМ ЛОГАРИФМИЧЕСКИХ
ЧАСТОТНЫХ ХАРАКТЕРИСТИК
ИНТЕЗ
СИСТЕМЫ МЕТОДОМ ЛОГАРИФМИЧЕСКИХ
ЧАСТОТНЫХ ХАРАКТЕРИСТИК
4.1 Построение ЛАЧХ неизменяемой части системы
Микропроцессор по принципу работы является машиной дискретного действия, которая выдает результаты через установленные периоды повторения. В промежутках между выдачей команд выход микропроцессора сохраняет свое значение.
Асимптотическая ЛАЧХ представляет собой ломаную линию, имеющую точки излома в сопрягаемых частотах, определяемых постоянными времени звеньев:
![]() (31)
(31)
![]() (32)
(32)
Прологарифмируем полученные частоты:
![]() (33)
(33)
![]() (34)
(34)
Выражение для ЛАЧХ имеет вид:
![]() (35)
(35)
![]() (36)
(36)
По оси абсцисс откладываем логарифмы частот сопряжений и через них проводим вертикальные асимптоты. Находим границу низкочастотной области. Откладываем по оси ординат полученное значение и проводим параллельную линию оси абсцисс до пересечения с первой асимптотой. Строим ЛАЧХ, основываясь на том, что числитель дает наклон (+20дБ/дек), знаменатель дает наклон (- 20дБ/дек).
Cтроим ЛАЧХ разомкнутой системы. От точки 20lg308,66 до сопрягающей частоты 2 строим прямую с наклоном 0 дБ/дек. Далее до сопрягающей частоты 1 – с наклоном -20 дБ/дек. После 1 – наклон 40 дБ/дек.
В приложении 1 представлена ЛАЧХ данной
системы.
приложении 1 представлена ЛАЧХ данной
системы.
4.2 Построение желаемой ЛАЧХ
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющую, желаемые статические и динамические свойства.
Построение желаемой ЛАЧХ основывается на оценках качества: величина перерегулирования (30%); время перерегулирования (3 с).
Найдем частоту среза по формуле:
![]() (37)
(37)
где к0- коэффициент, определяемый из номограммы Солодовникова. Тогда подставив числовые значения, получим:
![]() (38)
(38)
![]() ;
(39)
;
(39)
Теперь определим сопрягающую частоту, которая ограничивает средне-частотную область слева и справа, найдя коэффициенты для этих частот по соответствующей номограмме. Проводим прямые с ординатой 14 дБ и -14дБ и обрезаем среднюю асимптоту.
Совмещаем высокочастотную ассимптоты желаемой ЛАЧХ и действительной ЛАЧХ. Наклоны желаемой характеристики в области высоких частот совпадают с наклонами неизменяемой части системы.
Построим ЛФЧХ по формуле:
![]() (40)
(40)
Задаваясь числовыми значениями частоты, составим таблицу значений ЛФЧХ (таблица 1). По полученным значениям строим график ЛФЧХ (приложение1).
П о
графику определим:
о
графику определим:
запас устойчивости по модулю H M=10дБ;
- запас устойчивости по фазе φ˚=10˚.
Таблица 1 . Расчет ЛФЧХ
-
ω
0
1
10
100
φ(ω)
-90˚
-114,37˚
-184,19˚
-251,3˚
По полученным данным, следует, что система имеет не достаточный запас устойчивости.
Изложенный метод построения желаемой ЛАЧХ содержит некоторые допущения. Кроме того, графические этапы расчета вносят неизбежные неточности. Поэтому расчет чаще всего дает лишь приближенные значения параметров системы.
4.3 Построение ЛАЧХ и расчет передаточной функции корректирующего устройства
В следящих линейных системах целесообразней использовать последовательные корректирующие устройства (КУ). Построим ЛАЧХ корректирующего устройства, которая изображена в приложении 1. Пусть наше корректирующее устройство включено последовательно в электрическую часть цепи. Следовательно, находится по формуле:
![]() (41)
(41)
где
![]() и
и![]() соответственно
желаемая ЛАЧХ и ЛАЧХ неизменяемой части.
соответственно
желаемая ЛАЧХ и ЛАЧХ неизменяемой части.
![]() (42)
(42)
По ЛАЧХ корректирующего устройства находим передаточную функцию:
![]()
 (43)
(43)
Из графика следует:
![]() (44)
(44)
![]() (45)
(45)
![]() (46)
(46)
![]() (47)
(47)
По виду передаточной функции определяем корректирующее звено:
![]() (48)
(48)
![]() (49)
(49)
![]() (50)
(50)
Рисунок 5 – Принципиальная схема корректирующего устройства
Произвольно зададим один из параметров корректирующего звена. Положим:
![]() (51)
(51)
![]()
 (52)
(52)
![]() (53)
(53)
![]() (54)
(54)
Передаточная функция привода с корректирующим звеном:
![]()
![]() (55)
(55)
![]() (56)
(56)
4.4 Анализ системы с корректирующим устройством
Для оценки качества системы построим переходный процесс системы с передаточной функцией (56), аналогично разделу 3.3:
![]() (57)
(57)
Теперь перейдем к h(t) с помощью обратного преобразования Лапласа:
 (58)
(58)
И получим уравнение переходного процесса:
![]() (59)
(59)
По данному уравнению (59) на рисунке 6 построим график.
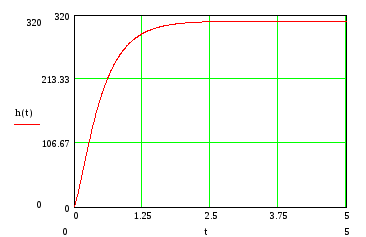
Рисунок 6 - График переходного процесса скоректированной системы.
Исходя из полученной переходной функции h(t) проведем оценку качества системы:
- Установившееся значение переходного процесса hуст = 310;
- Максимальное значение переходного процесса hуст = 310 ;
- Время переходного процесса tn= 2,3с;
- Время перерегулирования переходного процесса =0 %
Построим ЛФЧХ скорректированного привода:
![]() (60)
(60)
Задаваясь числовыми значениями частоты, составим таблицу значений ЛФЧХ (таблица 2)
Таблица 2 . Расчет ЛФЧХ
-
ω
0
1
10
100
φ(ω)
-90˚
-161,08˚
-103,48˚
-209,12˚
По полученным значениям строим график ЛФЧХ с корректирующим устройством (приложение1).
По ЛФЧХ представленной в приложении 1 проверяется коэффициент запаса, который должен быть не меньше 30о. Определение запаса устойчивости разработанной системы имеет наклон –20 дб/дек на среднечастотном диапазоне частот. Это означает запаздывание по фазе ∆=30о. Значит система в нашем случае с достаточным запасом устойчивости. Следовательно, разработанная система регулирования частоты вращения ДПТ устойчива [ 7 стр. 367-382 ] .
К орректирующее
устройство в видеRC
– цепи включается последовательно с
усилителем (ОУ). Так как оно выполняет
стабилизирующую роль (защита от помех)
и подает уже откорректированный сигнал
на ОУ.
орректирующее
устройство в видеRC
– цепи включается последовательно с
усилителем (ОУ). Так как оно выполняет
стабилизирующую роль (защита от помех)
и подает уже откорректированный сигнал
на ОУ.
Схема последовательного включения корректирующего устройства в цепь регулятора частоты вращения представлена на рисунке 7.















МП – микропроцессор;
КУ – корректирующее устройство;
ОУ – операционный усилитель;
ТП – тиристорный преобразователь;
ДПТ- двигатель постоянного тока;
ТГ – тахогенератор.
Рисунок 7 – Функциональная схема с корректирующим устройством