Содержание.
1. Введение……………………………………………………………стр. 3
2. Задание на курсовую работу………………………………………стр. 4
3. Анализ исходных данных………………………………………….стр. 5
4. Анализ процесса резания…………………………………………..стр. 7
5. Разработка структурной схемы САР ……………………………..стр. 9
6. Анализ устойчивости некорректированной САР………………..стр. 12
7. Синтез САР с заданными показателями качества……………….стр. 13
8. Анализ качества САР………………………………………………стр. 15
9. Заключение………………………………………………………….стр.17
10. Список литературы………………………………………………..стр.18
1 Введение.
Теория автоматического управления и регулирования – наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники. Целью данной работы является проектирование системы автоматического управления (САР) среднеквадратической температурой в области резания. Данная САР должна поддерживать температуру в области резания на заданном уровне с определенной точностью и отвечать требованиям точности и быстродействия. Метод анализа и синтеза САР, примененный в данной работе - это метод с использованием логарифмических частотных характеристик (ЛЧХ) системы. Он является наиболее удобным, благодаря простоте, наглядности и точности, и поэтому используется в данной работе.
2 Задание на курсовую работу.
Оптимальная температура в зоне резания обеспечивает минимум интенсивности изнашивания режущего инструмента. При точении жаропрочного сплава ХН77ТЮР резцом ВК6М с параметрами заточки rв=1 мм; =0; =1=100; =1=450 оптимальная температура 0 составляет 7200С. Температура в зоне резания для данной пары «инструмент-деталь» определяется выражением:
0 = 267*(V^0.384)*(S^0.132)*(tп^0.098), 0С (1)
Для поддержания температуры в зоне резания на уровне 0 с заданной точностью изменяем V, регулируя скорость вращения двигателя шпинделя n дш, при неизменном задании Sз.
Произвести синтез САР температуры резания с запасами устойчивости по фазе =500, по модулю L6 дб, обеспечивающей заданную точность поддержания температуры, при заданных величинах возмущений.
Данные: вариант 35
Двигатель 2ПН100LYХЛ4, мощность 1.7 кВт, напряжение 110 В, Rя=0.294 Ом, Lя=10.6 мГн, Jном=0.012 кг*м^2, nном=2200 об/мин, КПД=77 %,
Vд=30 м/мин, Sз=0,084 мм/об,
t п мин=1.0 мм, t п макс=1.4 мм.
Тду=0.0 с. Тпу=0.0 с. Преобразователь энергии: Т1= 0.067 с., Т2=0.325 с.
Тс=0.0 с.
3. Анализ исходных данных
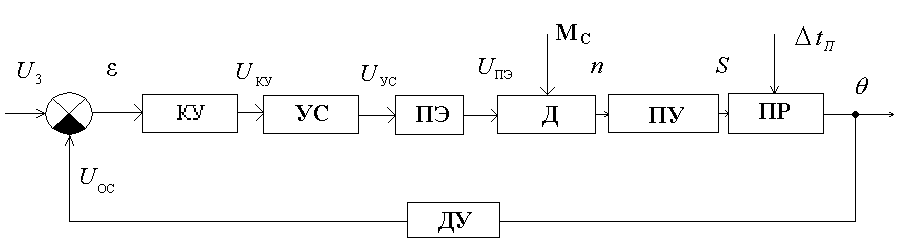
Схема взаимодействия электропривода и процесса резания приведена на рис. 1:
САР регулирует выходную координату процесса резания с заданной точностью. Процесс резания на схеме обозначен функциональным блоком ПР, управляющая координата ПР обозначена Х, возмущающее воздействие f. Передаточное устройство – это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процессом резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени ТПУ. Двигатель Д преобразует электрическую энергию в механическую энергию вращения вала. Двигатель является машиной постоянного тока с независимым возбуждением. Возбуждение машины осуществляется обмоткой ОВД. Поток возбуждения в процессе регулирования не изменяется и остается равным его номинальному значению. Регулирование скорости двигателя осуществляется изменением напряжения якоря U.
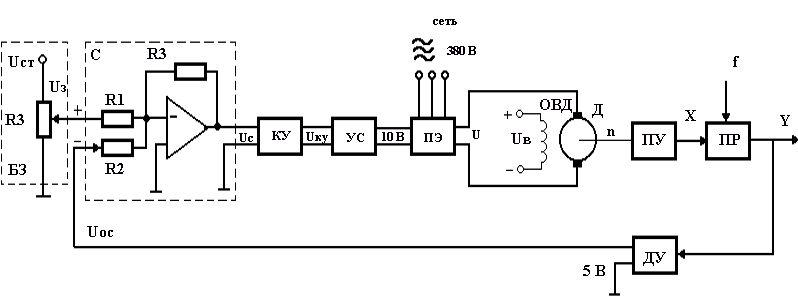
Преобразователь электрической энергии (ПЭ) преобразует электрическую энергию промышленной сети трехфазного переменного тока в электрическую энергию постоянного тока и регулирует величину выходного напряжения U, питающего цепь якоря двигателя Д. Преобразователь энергии является линейным звеном. Выходное напряжение U равно номинальному значению при напряжении управления 10 В. С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени Т1 и Т2.
УС - усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства.
КУ - корректирующее устройство. Корректирующее устройство корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1.
БЗ - блок задания, состоящий из источника стабилизированного напряжения и резистора R3, задает напряжение Uз величина которого определяет величину задания выходной координаты САР.
ДУ - измерительная система выходной координаты процесса резания. С точки зрения динамики представляет собой апериодическое звено первого порядка с постоянной времени ТДУ. При номинальном значении выходной координаты выдаёт напряжение Uос=5 В.
С - сумматор на базе операционного усилителя, безынерционное звено с коэффициентом передачи равным 1. суммирование осуществляется по алгоритму Uс=Uз-Uос.
Функциональная схема будет выглядеть так: