

2.2 Оценка запаса устойчивости сар по каналу управляющего воздействия
script 7
>> [Gm1,Pm1]=margin(W1)
Gm1 = Inf
Pm1 =46,8966
>> [Gm2,Pm2]=margin(W2)
Gm2 =10,2503
Pm2 = 39,2634
>> [Gm3,Pm3]=margin(W3)
Gm3 =Inf
Pm3 =35,8588
Таблица 2 Параметры запаса устойчивости САР по каналу управляющего воздействия
-
∆L, дб запас по амплитуде
∆φ, град
П-рег
∞
46,8966
ПИ-рег
∞
39,2634
ПИД-рег
∞
35,8588
Вывод: Все САР имеют запас устойчивости так как у всех ∆L>6дб, ∆φ>300
2.3 Оценка качества сар по каналу возмущающего воздействия

Рисунок 14.Структурная схема преобразованной САР
Переходную функцию САР по возмущению определяют по формуле замыкания:
![]() (5)
(5)
где W(s)- Переходная функция разомкнутой САР
script 8
>> Fiz1=feedback(Wop,Wap1);
>> Fiz2=feedback(Wop,Wap2);
>> Fiz3=feedback(Wop,Wap3);
>> step(Fiz1,Fiz2,Fiz3)

Рисунок 15 Переходные характеристики по каналу возмущающего воздействия
Таблица 3 Параметры качества САР по каналу возмущающего воздействия
-
ymax
ymax2
yуст
σ,%
Ε∞
tp
tн
tmax
æ
T
ω
n
П-рег
0,916
0,716
0,675
35.7
0,675
61.8
6.42
15.4
5,87
28.1
0.224
1.5
ПИ рег
0,862
0,407
0
Inf
0
214
0
14.4
2.11
29.1
0.216
1.5
ПИД рег
0.667
0.125
0
Inf
0
77.2
0
13.3
5.336
29.6
0.212
1.5
Вывод: П-регулятор имеет лучшее время быстродействия, но у него большая погрешность. ПИ-регулятор имеет самую большую величину перерегулирования σ и наибольшее время быстродействия, хотя нулевую погрешность. ПИД-регулятор как и ПИ-регулятор имеет нулевую погрешность, лучшее быстродействие по сравнению с ПИ-регулятором, но хуже чем П-регулятор и меньшую величину перерегулирования.
3. Оценка управляемости и наблюдаемости линейной сар
Для анализа управляемости и наблюдаемости САР необходимо математическую модель (ММ) системы привести к виду «вход-состояние-выход»
![]() (6)
(6)
так как исследуемые свойства системы непосредственно связаны со структурой матриц А, В, С уравнений состояния.
Понятие наблюдаемости связано с возможностью определения переменных состояния по результатам измерения выходных переменных Y.
Понятие управляемости связано с возможностью приведения системы в заданное состояние с помощью управляющих (входных) воздействий U.
Для оценки управляемости САР вводят в рассмотрение матрицу управляемости:
Y=[B АВ A2B…An-1B] (7)
Первая теорема Калмана устанавливает условие управляемости: САУ полностью управляема тогда и только тогда, когда ранг матрицы управляемости Y равен размерности вектора переменных состояния n.
Для оценки наблюдаемости САР вводят в рассмотрение матрицу наблюдаемости:
H=[CT ATCT AT2CT…AT n-1CT] (8)
Вторая теорема Калмана устанавливает условие наблюдаемости: САУ вполне наблюдаема тогда и только тогда, когда ранг матрицы управляемости H равен n.
3.1 Оценка управляемости и наблюдаемости линейной САР с П-регулятором
>> b2=0.825; b1=6.38; b0=3.74; a3=280; a2=131.8; a1=26.38; a0=5.04;
>> A=[0 1 0;0 0 1;-a0/a3 -a1/a3 -a2/a3]
A =
0 1.0000 0
0 0 1.0000
-0.0180 -0.0942 -0.4707
>> B=[0;0;1];
>> C=[b0/a3 b1/a3 b2/a3]
C =
0.0134 0.0228 0.0029
>> D=0;
>> sys=ss(A,B,C,D)
a =
x1 x2 x3
x1 0 1 0
x2 0 0 1
x3 -0.018 -0.09421 -0.4707
b =
u1
x1 0
x2 0
x3 1
c =
x1 x2 x3
y1 0.01336 0.02279 0.002946
d =
u1
y1 0
>> Y=[B A*B A^2*B]
Y =
0 0 1.0000
0 1.0000 -0.4707
1.0000 -0.4707 0.1274
>> r1=rank(Y)
r1 = 3
Следовательно, согласно критерию управляемости Калмана исследуемая САР полностью управляема, так как n=3.
>> d1=det(Y)
d1 = -1
Так как определитель не равен нулю, матрица управляемости является не вырожденной. Это также означает, что САР полностью управляема.
>> H1=[C;C*A;C*A^2]
H1 =
0.0134 0.0228 0.0029
-0.0001 0.0131 0.0214
-0.0004 -0.0021 0.0030
>> r11=rank(H1)
r11 = 3
Следовательно, согласно критерию наблюдаемости Калмана исследуемая САР полностью наблюдаема, так как n=3.
>> d11=det(H1)
d11 = 9.4771e-007
Так как определитель не равен нулю, матрица наблюдаемости является не вырожденной. Это также означает, что САР полностью наблюдаема
3.2 Оценка управляемости и наблюдаемости линейной САР с ПИ-регулятором
>> b3=0.84; b2=6.515; b1=3.953; b0=0.085; a4=280; a3=131.8; a2=26.51; a1=5.253; a0=0.085;
>> A=[0 1 0 0;0 0 1 0;0 0 0 1;-a0/a4 -a1/a4 -a2/a4 -a3/a4]
A =
0 1.0000 0 0
0 0 1.0000 0
0 0 0 1.0000
-0.0003 -0.0188 -0.0947 -0.4707
>> B=[0;0;0;1];
>> C=[b0/a4 b1/a4 b2/a4 b3/a4]
C =
0.0003 0.0141 0.0233 0.0030
>> C=[b0/a4 b1/a4 b2/a4 b3/a4]
C =
0.0003 0.0141 0.0233 0.0030
>> D=0;
>> Y2=[B A*B A^2*B A^3*B]
Y2 =
0 0 0 1.0000
0 0 1.0000 -0.4707
0 1.0000 -0.4707 0.1269
1.0000 -0.4707 0.1269 -0.0339
>> d21=det(Y2)
d21 =1
Так как определитель не равен нулю, матрица управляемости является не вырожденной. Это также означает, что САР полностью управляема.
>> r21=rank(Y2)
r21 = 4
Следовательно, согласно критерию управляемости Калмана исследуемая САР полностью управляема, так как n=4.
>> H2=[C;C*A;C*A^2;C*A^3]
H2 =
0.0003 0.0141 0.0233 0.0030
-0.0000 0.0002 0.0138 0.0219
-0.0000 -0.0004 -0.0018 0.0035
-0.0000 -0.0001 -0.0007 -0.0035
>> r22=rank(H2)
r22 = 4
Следовательно, согласно критерию наблюдаемости Калмана исследуемая САР полностью наблюдаема, так как n=4.
>> d22=det(H2)
d22 = -9.9331e-013
Так как определитель не равен нулю, матрица наблюдаемости является не вырожденной. Это также означает, что САР полностью наблюдаема
3.3 Оценка управляемости и наблюдаемости линейной САР с ПИД-регулятором
b4=1.269; b3=13.47; b2=31.27; b1=10.1; b0=0.407;
a4=351.3; a3=168.5; a2=53.27; a1=11.5; a0=0.407;
>> B0=b4/a4= 0.038
>> B1=(b3-B0*a3)/a4=0.0307
>> B2=(b1-B0*a2-B1*a3)/a4=0.0017
>> B3=(b1-B0*a1-B1*a2-B2*a3)/a4=0.0130
>> B4=(b0-B0*a0-B1*a1-B2*a2-B3*a3)/a4= -0.0063
>> Apid=[0 0 0 -a0/a4;1 0 0 -a1/a4;0 1 0 -a2/a4;0 0 1 -a3/a4]
Apid =
0 0 0 -0.0010
1.0000 0 0 -0.0220
0 1.0000 0 -0.1153
0 0 1.0000 -0.4988
>> Bpid=[B1;B2;B3;B4]
Bpid =
0.0307
0.0017
0.0130
-0.0063
>> Cpid=[0 0 0 1];
>> Dpid=0;
>> Ypid=[Bpid Apid*Bpid Apid^2*Bpid Apid^3*Bpid]
Ypid =
0.0307 0.0000 -0.0000 0.0000
0.0017 0.0308 -0.0003 0.0001
0.0130 0.0024 0.0290 0.0003
-0.0063 0.0161 -0.0056 0.0318
>> rpid=rank(Ypid)
rpid = 4
Следовательно, согласно критерию управляемости Калмана исследуемая САР полностью управляема, так как n=4.
>> dpid=det(Ypid)
dpid = 8.7167e-007
Так как определитель не равен нулю, матрица управляемости является не вырожденной. Это также означает, что САР полностью управляема.
>> Hpid=[Cpid;Cpid*Apid;Cpid*Apid^2;Cpid*Apid^3]
Hpid =
0 0 0 1.0000
0 0 1.0000 -0.4988
0 1.0000 -0.4988 0.1335
1.0000 -0.4988 0.1335 -0.0311
>> dpid1=det(Hpid)
dpid1 = 1
Так как определитель не равен нулю, матрица управляемости является не вырожденной. Это также означает, что САР полностью управляема.
>> rpid1=rank(Hpid)
rpid1 = 4
Следовательно, согласно критерию управляемости Калмана исследуемая САР полностью управляема, так как n=4.
4. Анализ нелинейной САР методом гармонической линеаризации
Предположим, что система автоматического регулирования, рассмотренная выше, имеет регулирующий орган с нелинейной характеристикой.
Метод гармонической линеаризации основан на предположении, что колебания на входе нелинейного звена являются синусоидальными, т.е.что
X(t)=Asinωat,
Где А-амплитуда; ωa-частота этих колебаний.
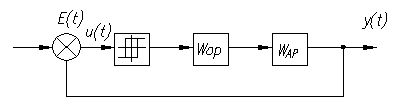
Рисунок 16. Структурная схема нелинейной САУ
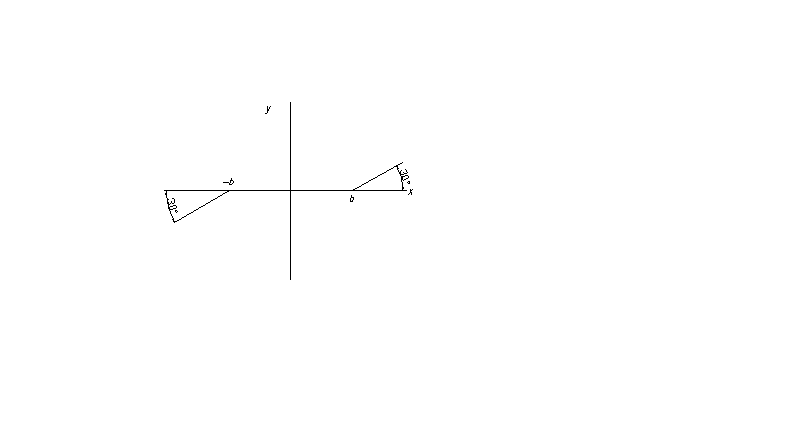
Рисунок 17. Статическая характеристика нелинейного усилителя
[1]
![]()
![]() ;
; b=3.8;
k=tgα;
;
; b=3.8;
k=tgα;
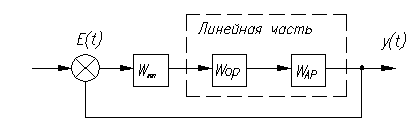
Рисунок 18. Структурная схема линеаризованной САУ
W(S)=WOP*WAP (10)
![]()
![]() (11)
(11)
где

![]() при А>b
при А>b
Условие возникновения автоколебаний:
Wnon(A)W(jω)=-1
или
![]() ; W(jω)=Z(A);
; W(jω)=Z(A);
Где
![]()
Уравнениние
W(jω)=Z(A)
решают
графически, необходимо построить на
одной комплексной плоскости годограф
W(jω)
и
![]() ,
если точка АЧХ Z(A),
соответствующая увеличенной амплитуде
А+∆А,
охватывается АЧФХ линейной части W(jω),
то рассматриваемые колебания устойчивы,
в противном случае они не устойчивы.
,
если точка АЧХ Z(A),
соответствующая увеличенной амплитуде
А+∆А,
охватывается АЧФХ линейной части W(jω),
то рассматриваемые колебания устойчивы,
в противном случае они не устойчивы.
В MATLAB
>> w=0.25:0.01:10;
>> W=(0.825.*(w*j).^2+6.38.*w*j+3.74)./(280.*(w*j).^3+131.*(w*j).^2+20.*w*j+1.3);
>> re=real(W);
>> im=imag(W);
>> plot(re,im)
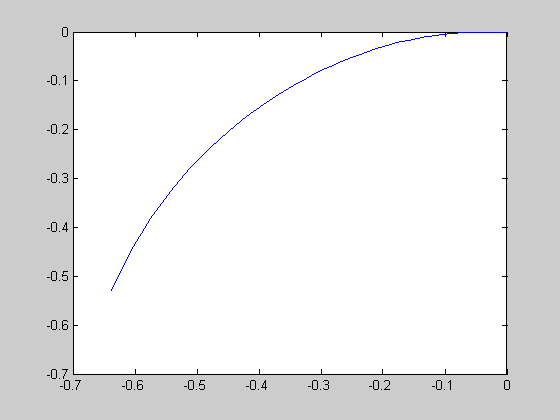
Рисунок 19. Годограф Найквиста
>> A=5:0.1:15;
>> Kg=(2*B/b*pi)./(asin(b./A)+(b./A).*sqrt(1-b^2./A.^2));
>> K=Kg+j.*Kg1;
>> Z=-1./K;
>> Re=real(Z);
>> Im=imag(Z);
>> plot(Re,Im)

Рисунок 20. Годограф Гольдфарба линейной части САУ
>> plot(re,im,Re,Im)
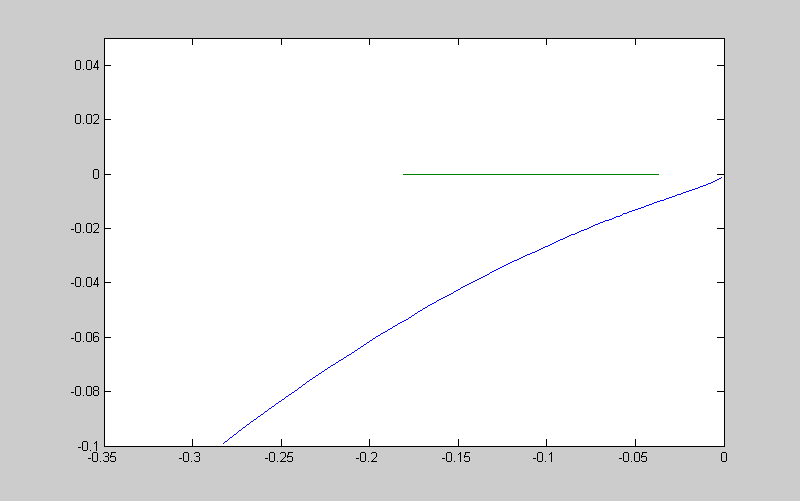
Рисунок 21. Годограф линеаризованной САУ
Вывод: Точка АЧХ Z(A), соответствующая увеличенной амплитуде А+∆А, не охватывается АЧФХ линейной части W(jω), поэтому рассматриваемые колебания не устойчивы.