

Содержание
|
1. |
Расчёт параметров настройки типовых регуляторов линейной САР |
2 |
|
1.1 |
Описание линейной САР |
2 |
|
1.2 |
Анализ объекта регулирования |
2 |
|
1.3 |
Расчёт коэффициента передачи П-регулятора |
3 |
|
1.4 |
Расчёт коэффициента передачи ПИ-регулятора |
7 |
|
1.5 |
Расчёт коэффициента передачи ПИД-регулятора |
10 |
|
2. |
Оценка качества и запаса устойчивости линейной САР |
14 |
|
2.1 |
Оценка качества САР по каналу управляющего воздействия |
14 |
|
2.2 |
Оценка запаса устойчивости САР по каналу управляющего воздействия |
14 |
|
2.3 |
Оценка качества САР по каналу возмущающего воздействия |
15 |
|
3. |
Оценка управляемости и наблюдаемости линейной САР |
17 |
|
3.1 |
Оценка управляемости и наблюдаемости линейной САР с П-регулятором |
17 |
|
3.2 |
Оценка управляемости и наблюдаемости линейной САР с ПИ-регулятором |
19 |
|
3.3 |
Оценка управляемости и наблюдаемости линейной САР с ПИД-регулятором |
20 |
|
4. |
Анализ нелинейной САР методом гармонической линеаризации |
22 |
|
|
Список литературы |
27 |
|
|
Приложения |
|
-
Расчёт параметров настройки типовых регуляторов линейной САР
-
-
-
1.1 Описание линейной САР

Рисунок 1. Структурная схема САР
z(t)-возмущение
E(t)-ошибка регулирования
![]() (1)
(1)
1.2 Анализ объекта регулирования
Для анализа объекта регулирования была использована система MATLAB
Script 1
>> T0=1.3;T1=20;T2=131;T3=280;T4=5.8;T5=0.75;Kop=3.4;
>> Wop=tf([T5 T4 Kop],[T3 T2 T1 T0])
Transfer function:
0.75 s^2 + 5.8 s + 3.4
------------------------------
280 s^3 + 131 s^2 + 20 s + 1.3
>> step(Wop)

Рисунок 2. Переходная характеристика или разгонная характеристика объекта регулирования
Вывод: Анализ переходной характеристики объекта регулирования показывает, что объект обладает свойствами:
-
Самовыравния
-
Является многоёмкостным
-
Характеризуется запаздыванием
-
1.3 Расчёт коэффициента передачи П-регулятора
Для расчёта коэффициента передачи П-регулятора использован метод расширенных частотных характеристик (РЧХ). Этот метод при синтезе САР удовлетворяет требование к степени затухания Ψ=0,82 переходного процесса системы. Используемый метод базируется на понятии амплитудно-фазовых частотных характеристик (АЧФХ) объекта Wop и регулятора Wap. Их получаем из ПФ Wop(s) и Wap(s) заменой оператора Лапласа s оператором (j-m)ω, где m-степень колебательности:
Ψ=1-е-2πm при Ψ=0,82
![]() 0,273
0,273
-
Получаем расширенную АЧФХ объекта регулирования
-
Записываем инверсную расширенную АЧФХ объекта регулирования
-
Записываем инверсную расширенную АЧФХ объекта регулирования в алгебраическом виде:
![]() (2)
(2)
где R(m,ω)-Инверсная расширенная вещественная ЧХ объекта регулирования
J(m,ω)-Инверсная расширенная мнимая ЧХ объекта регулирования
-
Задаваясь различными значениями частоты ω,на плоскости параметров настройки АР строят линию равной степени затухания Ψ=0,82 по параметрическим уравнениям:
![]() (3)
(3)
-
Определяем искомые параметры П-регулятора как координаты точки пересечения годографа и оси абсцисс.
-
Получим переходную характеристику САР по которой рассчитывают степень затухания Ψ и сравниваем с заданной Ψзад=0,82
В MATLAB:
Script 2
>> w=0.07:0.001:0.220;
>> m=0.273;
>> Wex=(T5*((j-m).*w).^2+T4*((j-m).*w)+Kop)./(T3*((j-m).*w).^3+T2*((j-m).*w).^2+T1*((j-m).*w)+T0);
>> Win=1./Wex;
>> R=real(Win);
>> J=imag(Win);
>> Ki=w*(m^2+1).*J;
>> Kp=m.*J-R;
>> plot(Kp,Ki);xlabel('axis Kp');ylabel('axis Ki')

Рисунок 3.Линия равной степени затухания
Выбрано Kp=1.1
Script 3 (проверка)
>> Wap1=tf(1.1,1);
>> W1=series(Wap1,Wop)
Transfer function:
0.825 s^2 + 6.38 s + 3.74
------------------------------
280 s^3 + 131 s^2 + 20 s + 1.3
>> Fi1=feedback(W1,1)
Transfer function:
0.825 s^2 + 6.38 s + 3.74
------------------------------------
280 s^3 + 131.8 s^2 + 26.38 s + 5.04

Рисунок 4. Переходная характеристика САР с П-регулятором
Оценка степени затухания:
1. ymax1=1.01
ymax2=0.788
yуст=0,742
2.
![]()
Основные результаты:
Kp=1.1
0.825 s^2 + 6.38 s + 3.74
W1= ---------------------------------
280 s^3 + 131 s^2 + 20 s +1.3
0.825 s^2 + 6.38 s + 3.74 - Fi1 = ---------------------------------------------
280 s^3 + 131.8 s^2 + 26.38 s + 5.04
b2=0.825; b1=6.38; b0=3.74; a3=280; a2=131.8; a1=26.38; a0=5.04;
в SIMULINK

Рисунок 5. S-модель САР с П-регулятором

Рисунок 6. Переходная характеристика САР с П-регулятором построенная в SIMULINK
-
-
1.4 Расчёт параметров настройки ПИ-регулятора
Настроечные параметры Кр и Ki ПИ-регулятора определяются как координаты точки экстренума линии равной степени затухания (рис 3). Считают, что оптимальные значения параметров настройки ПИ-регулятора находятся несколько правее точки экстренума. Выбираем
Кр=0.7; Ki=0.045;
В MATLAB :
script 4 (проверка)
>> Wap2=tf([1.12 0.025],[1 0])
Transfer function:
1.12 s + 0.025
--------------
s
>> W2=series(Wap2,Wop)
Transfer function:
0.84 s^3 + 6.515 s^2 + 3.953 s + 0.085
--------------------------------------
280 s^4 + 131 s^3 + 20 s^2 + 1.3 s
>> Fi2=feedback(W2,1)
Transfer function:
0.84 s^3 + 6.515 s^2 + 3.953 s + 0.085
-------------------------------------------------
280 s^4 + 131.8 s^3 + 26.51 s^2 + 5.253 s + 0.085
>> step(Fi2)

Рисунок 7. Переходная характеристика САР с ПИ-регулятором
Оценка степени затухания:
ymax1=1.28
ymax2=1,05
yуст=1

Основные результаты:
Кр=0.7; Ki=0.045; при Ψ= 0.82;
0.84 s^3 + 6.515 s^2 + 3.953 s + 0.085
W2= ------------------------------------------------
280 s^4 + 131 s^3 + 20 s^2 + 1.3 s
0.84 s^3 + 6.515 s^2 + 3.953 s + 0.085
Fi2= -----------------------------------------------------------
280 s^4 + 131.8 s^3 + 26.51 s^2 + 5.253 s + 0.085
b3=0.84; b2=6.515; b1=3.953; b0=0.085; a4=280; a3=131.8; a2=26.51; a1=5.253; a0=0.085;
в SIMULINK
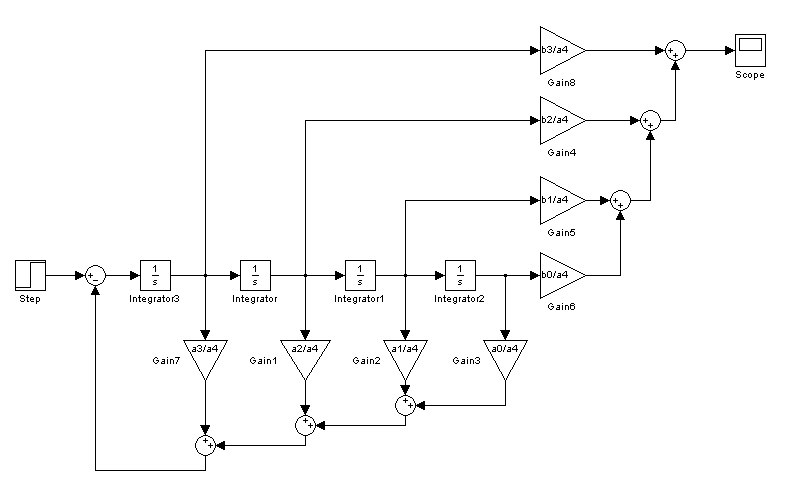
Рисунок 8. S-модель САР с ПИ-регулятором

Рисунок 9. Переходная характеристика САР с ПИ-регулятором построенная в SIMULINK
1.5 Расчёт параметров настройки ПИД-регулятора
Последовательность параметризации ПИД-регулятора с тремя настроечными параметрами KD, Kp, Ki, отличается от рассмотренной операциями по определению коэффициента KD=1.41 (заданно в условиях задачи). В этом случае линию равной степени затухания описывают следующими параметрическими уравнениями:
 (4)
(4)
В MATLAB получили:
Script 5:
>> w=0.01:0.001:0.270;
>> Wex=(T5*((j-m).*w).^2+T4*((j-m).*w)+Kop)./(T3*((j-m).*w).^3+T2*((j-m).*w).^2+T1*((j-m).*w)+1);
>> Win=1./Wex;
>> R=real(Win);
>> J=imag(Win);
>> Kp=m.*J-R+2*m.*w*1.41;
>> Ki=w*(m^2+1).*(J+w*1.41);
>> plot(Kp,Ki);xlabel('axis Kp');ylabel('axis Ki')

Рисунок 10. Линия равной степени затухания
Script 6 (проверка)
>> Wap3=tf([1.41 1.3 0.082],[1 0])
Transfer function:
1.41 s^2 + 1.3 s + 0.082
------------------------
s
>> W3=series(Wap3,Wop)
Transfer function:
1.057 s^4 + 9.153 s^3 + 12.4 s^2 + 4.896 s + 0.2788
---------------------------------------------------
280 s^4 + 131 s^3 + 20 s^2 + 1.3 s
>> Fi3=feedback(W3,1)
Transfer function:
1.057 s^4 + 9.153 s^3 + 12.4 s^2 + 4.896 s + 0.2788
---------------------------------------------------
281.1 s^4 + 140.2 s^3 + 32.4 s^2 + 6.196 s + 0.2788
>> step(Fi3)

Рисунок 11. Переходная характеристика САР с ПИД-регулятором
Оценка степени затухания:
ymax1=1.27
ymax2=1,05
yуст=1
![]()
Основные результаты:
KD=1.41; Кр=1.3; Ki=0.082; при Ψ= 0.817;
1.057 s^4 + 9.153 s^3 + 12.4 s^2 + 4.896 s + 0.2788
W3= ------------------------------------------------------------------
280 s^4 + 131 s^3 + 20 s^2 + 1.3 s
1.057 s^4 + 9.153 s^3 + 12.4 s^2 + 4.896 s + 0.2788
Fi3= -------------------------------------------------------------------
281.1 s^4 + 140.2 s^3 + 32.4 s^2 + 6.196 s + 0.2788
b4=1.057; b3=9.153; b2=12.4; b1=4.896; b0=0.2788;
a4=281.1; a3=140.2; a2=32.4; a1=6.196; a0=0.2788;
в SIMULINK
>> B0=b4/a4;B1=(b3-B0*a3)/a4;B2=(b1-B0*a2-B1*a3)/a4;B3=(b1-B0*a1-B1*a2-B2*a3)/a4; B4=(b0-B0*a0-B1*a1-B2*a2-B3*a3)/a4;

Рисунок 12. S-модель САР с ПИД-регулятором
Рисунок 13. Переходная
характеристика САР с ПИД-регулятором
построенная в SIMULINK

-
Оценка качества и запаса устойчивости линейной САР
2.1 Оценка качества САР по каналу управляющего воздействия
Таблица 1 Параметры качества САР по каналу управляющего воздействия
-
ymax
ymax2
yуст
σ,%
Ε∞
tp
tн
tmax
æ
T
ω
n
П-рег
1.01
0.788
0.742
35.6
0.078
61.8
6.02
16
5.82
29
0.217
1.5
ПИ рег
1.28
1.05
1
27.5
0
45.5
5.5
15.3
5.6
30.2
0.208
1.5
ПИД рег
1.27
1.05
1
26.6
0
61.9
5.05
15
5.4
46.9
0.134
1.5
Вывод: наилучшее быстродействие имеет САР с П-регулятором, но уступает в точности САР с ПИ регулятором и САР с ПИД регулятором.