

3.4. Анализ замкнутой системы
3.4.1 Расчетный анализ
Расчетный анализ проведем по линейным моделям. Получим матрицы замкнутой системы.
obj=ss(A, B, C, D)
system = feedback(obj, regulator)
[As, Bs, Cs, Ds] = ssdata(system)
Проверим собственные значения системы:
eig(As)
ans = -14.0000
-12.0000
-10.0000
-8.0000
-1.0000
-2.0000
-4.0000
-3.0000
Замкнутая система имеет назначенные собственные значения.
3.4.2 Компьютерная имитация нелинейной системы.
Подключим линейный динамический регулятор к нелинейному объекту, как это показано на рис. 3.2.

Рис. 3.2. Система с динамическим регулятором
Прежде всего убедимся в том, что положение равновесия устойчиво при малых отклонениях. Для этого подвергнем линеаризации замкнутую систему:
[Ac1, Bc1, Cc1, Dc1]=linmod2('kyps2')
Вычислим собственные значения:
eig(Ac1)
ans = -14.0000
-12.0000
-10.0000
-8.0000
-1.0000
-2.0000
-4.0000
-3.0000
Получены
желаемые собственные значения. Положение
равновесия устойчиво. Оценим максимальные
отклонении маятника
![]() и положения каретки
и положения каретки![]() ,
при которых положение равновесия
устойчиво, т.е. процессы сходятся. На
рис. 3.3 показаны переходные процессы, а
– при отклонении каретки
,
при которых положение равновесия
устойчиво, т.е. процессы сходятся. На
рис. 3.3 показаны переходные процессы, а
– при отклонении каретки![]() ,
б – при отклонении маятника
,
б – при отклонении маятника![]()
|
а |
б |

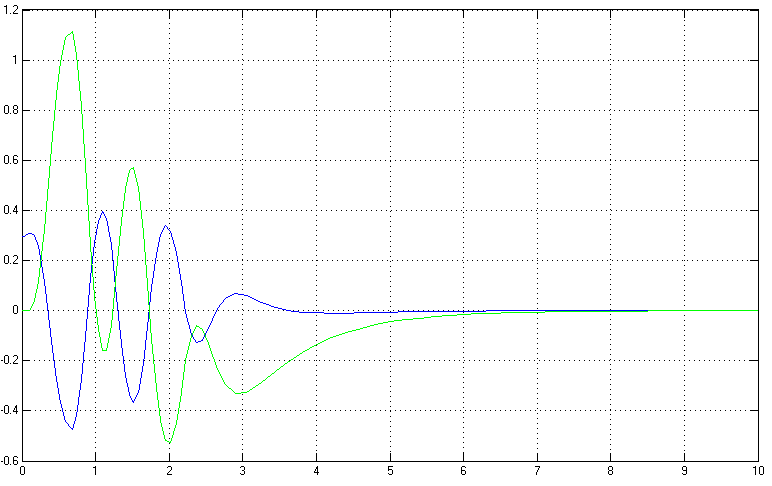
Рис.
3.3. Переходные
процессы в системе с регулятором.Синяя
кривая – положения маятника, зеленая
– положение каретки, а – при отклонении
каретки
![]() ,
б – при отклонении маятника
,
б – при отклонении маятника![]()
4. СИНТЕЗ ДИСКРЕТНОГО РЕГУЛЯТОРА
Дискретный регулятор может быть получен двумя способами (рис. 4.0.): дискретизацией непрерывного регулятора и синтезом дискретного регулятора по дискретной модели. В этом разделе представлены оба способа.

Рис. 4.0. Способы получения дискретного регулятора
4.1. Дискретизация непрерывного регулятора
Основным
вопросом при дискретизации непрерывного
регулятора является выбор периода
дискретизации
![]() .
Необходимо разрешить противоречие
между следующими требованиями:
.
Необходимо разрешить противоречие
между следующими требованиями:
слишком малые значения
 усложняют техническую реализацию.
усложняют техническую реализацию.слишком большие – приводят к недопустимой потере информации, в результате чего замкнутая система может оказаться неустойчивой, хотя в непрерывной системе существовала область устойчивости.
Период
дискретизации
![]() выбирается
путем приближения. Для выбора начального
значения
выбирается
путем приближения. Для выбора начального
значения![]() можно
воспользоваться теоремой Котельникова-Шеннона,
которая утверждает, что частота
дискретизации должна быть в два раза
выше максимальной частоты в спектре
сигнала. Спектр сигналов, циркулирующих
в контуре регулирования, определяется
максимальными по модулю собственными
значениями, которые были назначены при
синтезе. Примем, что максимальная частота
в спектре сигналов в 10 раз выше
максимального модуля собственных
значений. В нашем случае это
можно
воспользоваться теоремой Котельникова-Шеннона,
которая утверждает, что частота
дискретизации должна быть в два раза
выше максимальной частоты в спектре
сигнала. Спектр сигналов, циркулирующих
в контуре регулирования, определяется
максимальными по модулю собственными
значениями, которые были назначены при
синтезе. Примем, что максимальная частота
в спектре сигналов в 10 раз выше
максимального модуля собственных
значений. В нашем случае это![]() - максимальное собственное значение
умножить на 10. Для нахождения периода
дискретизации возьмем частоту, увеличенную
в два раза:
- максимальное собственное значение
умножить на 10. Для нахождения периода
дискретизации возьмем частоту, увеличенную
в два раза:
![]() .
.
Проведем дискретизацию полученного ранее непрерывного регулятора по команде:
[Ard, Brd, Crd, Drd] = c2dm(Ar, Br, Cr, Dr, T)
Ard = 0.1318 -0.0065 -0.0021 0.0124
27.6701 0.8804 -0.0188 0.3528
77.7434 -0.9900 0.6228 1.0583
-42.9546 -0.7949 -0.2537 0.7507
Brd = 0.8686
-27.6637
-77.7639
43.0087
Crd = -9.7859 -198.8359 -60.3874 -20.3874
Drd = 0
Полученные матрицы отвечают разностным уравнениям дискретного регулятора в форме пространства состояний:
![]()
Проведем расчетный анализ дискретной системы, изображенной на рис 4.1

Рис. 4.1. Линейная модель дискретной системы
Получим дискретную модель объекта из непрерывной модели командой:
[Ad, Bd, Cd, Dd] = c2dm (A,B,C,D,T)
Ad = 1.0000 -0.0005 -0.0000 0.0200
0 1.0025 0.0200 0
0 0.2455 1.0025 0
0 -0.0491 -0.0005 1.0000
Bd = 0.0001
-0.0001
-0.0050
0.0050
Cd = 1 0 0 0
Dd = 0
Вычислим матрицу замкнутой дискретной системы:
[Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd);
Вычислим собственные значения системы:
abs(eig (Acd))
ans = 1.6076
1.6076
0.1058
1.1914
1.0627
0.9946
0.9392
0.9348
Замкнутая дискретная система оказалась
неустойчивой. Причиной этого может быть
слишком большой
![]() .
Чтобы проверить это уменьшим
.
Чтобы проверить это уменьшим![]() в десять раз.
в десять раз.
![]()
T = 0.002;
[Ard,Brd,Crd,Drd]=c2dm(Ar,Br,Cr,Dr,T);
[Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,T);
[Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd);
abs(eig(Acd))
ans = 0.8185
1.0449
1.0449
1.0117
1.0059
0.9991
0.9937
0.9930
Система вновь оказалась неустойчивой.
Попробуем уменьшить
![]() в десять раз.
в десять раз.
T = 0.0002;
[Ard,Brd,Crd,Drd]=c2dm(Ar,Br,Cr,Dr,T);
[Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,T);
[Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd);
abs(eig(Acd))
ans = 0.9807
1.0042
1.0042
1.0012
1.0006
0.9999
0.9994
0.9993
Система вновь оказалась неустойчивой.
Попробуем уменьшить
![]() в десять раз.
в десять раз.
T = 0.00002;
[Ard,Brd,Crd,Drd]=c2dm(Ar,Br,Cr,Dr,T);
[Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,T);
[Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd);
abs(eig(Acd))
ans = 0.9981
1.0004
1.0004
1.0001
1.0001
1.0000
0.9999
0.9999
Система вновь оказалась неустойчивой.
Попробуем уменьшить
![]() в десять раз.
в десять раз.
T = 0.000002;
[Ard,Brd,Crd,Drd]=c2dm(Ar,Br,Cr,Dr,T);
[Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,T);
[Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd);
abs(eig(Acd))
ans = 0.9998
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
Система стала устойчивой, однако возможны проблемы с последующей реализацией дискретного регулятора.
[numrd1,denrd1]=ss2tf(Ard,Brd,Crd,Drd);
dreg1=tf(numrd1,denrd1)
Transfer function:
1.986 s^3 - 5.958 s^2 + 5.958 s - 1.986
-----------------------------------------------
s^4 - 4 s^3 + 6 s^2 - 4 s + 0.9999
Замкнутая дискретная система в линейном
приближении оказалась устойчивой при
периоде дискретизации
![]() .
.
Проведем имитационное исследование модели, образованной нелинейным непрерывным объектом и линейным дискретным регулятором для оценки размеров области притяжения (Рис 4.2).
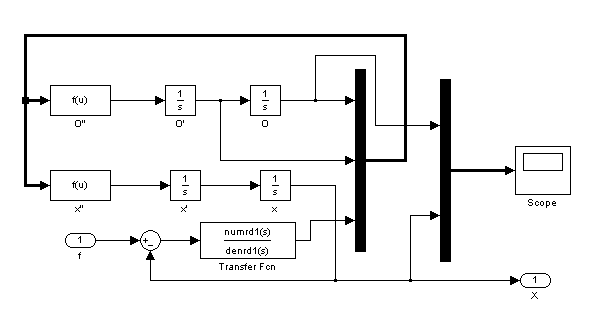
Рис. 4.2. Гибридная модель системы
Экспериментально удалось установить,
что регулятор не способен стабилизировать
объект при отклонении маятника даже
![]() .
Переходные процессы при этом показаны
на рис. 4.3.а. На рис. 4.3.б увеличен отрезок
стартового поведения системы.
.
Переходные процессы при этом показаны
на рис. 4.3.а. На рис. 4.3.б увеличен отрезок
стартового поведения системы.
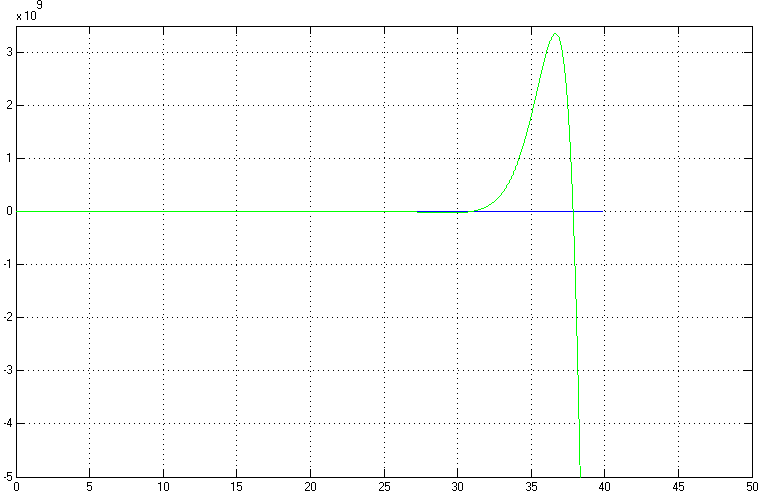
Рис. 4.3.а. Переходные процессы в системе
с регулятором при
![]() .
.
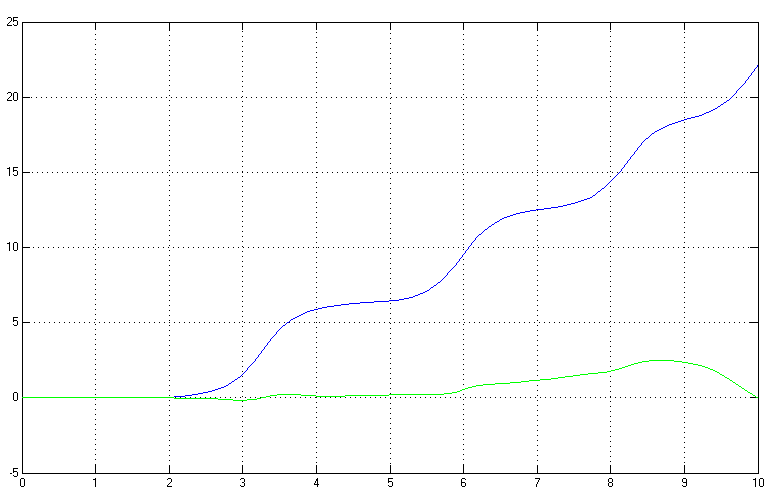
Рис. 4.3.б. Переходные процессы в системе
с регулятором при
![]() .
.
Из графиков видно, что мы не смогли дискретизировать непрерывный регулятор, поэтому попробуем провести синтез дискретного регулятора.