

Форма входного воздействия показана на рис. 107
Р ис.107
ис.107
Формула расчёта выходного сигнала:
![]() , (11.1)
, (11.1)
где
![]()
Полиномы P(s) и Q(s) формируются по предначальным значениям входного и выходного сигналов:

Т.к.
в нашем случае начальные значения
координат объекта и их производных
равны нулю (нулевые начальные условия),
то P(s)=Q(s)=0.
Следовательно,
![]() и
и
![]() .
Формула расчёта выходного сигнала
приобретает вид:
.
Формула расчёта выходного сигнала
приобретает вид:
![]() (11.2)
(11.2)
Представим входной сигнал суммой полубесконечных смещённых составляющих:
![]() (11.3)
(11.3)
![]()
Вспомним, что единичная функция Хевисайда имеет вид:
![]() (11.4)
(11.4)
Продолжим расчёт выходного сигнала:
![]()
Здесь
![]() -
изображение несмещённого сигнала входа
-
изображение несмещённого сигнала входа
![]() .
.
![]()
Обратное преобразование Лапласа выражения в фигурных скобках нами уже было выполнено в пункте 10.2 (см. (10.4), (10.5)). Таким образом, получаем:
![]()
Аналогично вычисляем остальные составляющие выходного сигнала:

Окончательно получаем:
![]() (11.5)
(11.5)
На рис.108 представлен график входного, а на рис.109, 110 - выходного сигналов.
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Рис.108

Рис.109

Рис.110
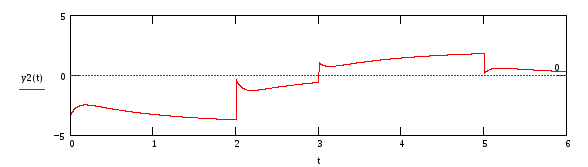
Рис.111
На рис.109, 110 видно, что расходящаяся составляющая переходной характеристики способствует неограниченному возрастанию выходного сигнала при воздействии на входе сигнала рис.108. На рис.111 показан сигнал на выходе системы без расходящейся составляющей при заданном входном воздействии.
Список литературы.
-
Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. Часть 1: Учеб. пособие / Нижегород. гос. техн. ун-т. Н.Новгород, 1996. 112 с.
-
Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. Часть 2: Учеб. пособие / Нижегород. гос. техн. ун-т. Н.Новгород, 1997. 114 с.
-
Макаров И.М., Менский Б.М. Линейные автоматические системы.-М.: Машиностроение, 1982. 504 с.